重型设备水平搬运用地坦克的制作方法
1.本技术涉及搬运设备领域,具体而言,涉及一种重型设备水平搬运用地坦克。
背景技术:
2.地坦克即搬运小车(或重物移运器),顾名思义,主要作用是用来在平地上(坡度不能太大)搬运设备。
3.现有的地坦克往往结构简单,地坦克轮体上通常设置有基座,而基座上只能放置一个设备,而对于较多设备的搬运工作,往往需要将设备进行叠加放置,当地坦克移动时,较多设备叠加放置使得设备放置不稳,甚至导致设备侧翻。另外,现有的重型设备水平搬运用地坦克往往不便对设备进行升降,使得地坦克搬运时的工作范围受到局限。
技术实现要素:
4.为了弥补以上不足,本技术提供了一种重型设备水平搬运用地坦克,旨在改善上述所提出的问题。
5.本技术实施例提供了一种重型设备水平搬运用地坦克,包括基座和升降机构,所述基座顶部设置有放置架,所述基座底部设置有底座箱,所述底座箱底部开口设置,所述底座箱设置有四个,四个所述底座箱分别设置于所述基座底面靠近四个端角处,所述底座箱内部转动安装有轮体,所述升降机构包括延伸座和框体,所述延伸座设置于所述基座一端,所述框体在所述延伸座顶部设置有两个,两个所述框体沿前后方向分布,所述框体内侧转动安装有螺杆,所述框体内侧设置有支撑板,两个所述螺杆传动连接,所述支撑板设置有一个,所述支撑板分别与两个所述螺杆螺纹套接,所述延伸座内部固定有电机,所述电机输出轴与所述螺杆传动连接。
6.在上述实现过程中,通过基座下方转动安装的轮体,以便对基座进行移动,将基座移动到合适位置后,启动电机,其中电机输出轴依次贯穿延伸座和框体且与一个螺杆相连,而两个螺杆传动连接,所以两个螺杆将进行同步转动,因为支撑板分别与两个螺杆螺纹套接,所以支撑板将进行竖向移动,使得支撑板处于较低位置,将需要搬运的设备放在支撑板上,并再次启动电机,使得支撑板向上移动,因为放置架上设置有多个放置的隔层,在支撑板向上移动至合适位置后,将设备通过两个框体之间的区域而移动至放置架上不同位置的隔层,从而完成设备的放置过程,通过轮体以便对设备进行移动,从而完成设备的搬运过程。
7.在一种具体的实施方案中,两个所述螺杆底部外壁均固定套接有齿轮,两个所述齿轮通过同步带传动连接。
8.在上述实现过程中,因为两个齿轮通过同步带传动连接,所以两个螺杆之间也为同步转动的关系,此种设计以便简单实现电机启动而带动两个螺杆同时转动的工作过程。
9.在一种具体的实施方案中,所述支撑板顶部开设有安装槽,所述安装槽内部转动安装有若干个导向轮,若干个所述导向轮呈均匀分布。
10.在上述实现过程中,导向轮转动安装在安装槽的设置,使得导向轮一部分位于安装槽内,而另一部分为支撑板顶部,当搬运的设备放在支撑板上时,通过若干个导向轮均匀分布的设置,以便对放置后的设备进行移动。
11.在一种具体的实施方案中,所述支撑板远离所述框体的一端铰接安装有上料板。
12.在上述实现过程中,在搬运工作前,将支撑板移动至较低位置,转动上料板,使得上料板远离支撑板的一端搭接在地面上,以便使得地面上的设备通过倾斜放置后的上料板而移动至支撑板顶部。
13.在一种具体的实施方案中,所述放置架包括竖杆和横板,所述竖杆设置有四个,四个所述竖杆分别设置于所述基座顶面靠近四个端角处,所述横板四个端角位置分别固定套接于相邻近的所述竖杆,所述横板设置有若干个,若干个所述横板呈等距分布。
14.在上述实现过程中,横板四个端角位置分别固定套接于相邻近的竖杆的设置,以使得设备可通过不同位置上相邻两个竖杆之间的区域而放置在横板上,若干个横板的设置,以便放置较多数量的设备。
15.在一种具体的实施方案中,一侧的两个所述竖杆外部均设置有套筒,两个所述套筒均活动套设在所述竖杆外部,所述套筒内部设置有轴承,所述套筒通过其内部的轴承与所述竖杆转动连接,两个所述套筒相对一端均设置有盖板,两个相对的所述盖板活动连接,若干个所述横板顶部设置有气缸,所述气缸输出轴连接有推板。
16.在上述实现过程中,转动两个相对齐的套筒,使得一侧两个沿前后方向分布的盖板处于张开状态,将设备通过两个前后方向竖杆之间的区域而放在横板上,再转动套筒,使得两个盖板之间处于闭合状态,其中气缸的输出轴穿过前后方向分布两个竖杆之间的区域,启动气缸以使得推板向一侧移动,以便抵紧放置后的设备。
17.在一种具体的实施方案中,两个相对的所述盖板一侧均设置有连接座,一个所述连接座上螺纹贯穿有顶杆,另一个所述连接座上开设有可供所述顶杆插接的插槽。
18.在上述实现过程中,在两个盖板相对齐后,旋动一个连接座上的顶杆,使得顶杆进入另一个连接座上的插槽,从而完成两个连接座的连接过程,最终完成两个相对齐盖板之间的连接过程。
19.在一种具体的实施方案中,所述顶杆一端设置有转手。
20.在上述实现过程中,转手的设置,以便转动顶杆。
21.在一种具体的实施方案中,处于同一个所述底座箱内的所述轮体对称设置有两个。
22.在上述实现过程中,通过处于同一个底座箱内的轮体对称设置有两个的设计,以使得每个底座箱的底部均可在地面上进行平稳的移动。
23.在一种具体的实施方案中,所述轮体外圈设置有硬质防滑垫。
24.在上述实现过程中,硬质防滑垫可设置为硬质的防滑材料,具体型号在此不多赘述,通过硬质防滑垫设置在轮体外圈的设计,以提高轮体与地面接触时的摩擦力。
附图说明
25.为了更清楚地说明本技术实施方式的技术方案,下面将对实施方式中所需要使用的附图作简单地介绍,应当理解,以下附图仅示出了本技术的某些实施例,因此不应被看作
是对范围的限定,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他相关的附图。
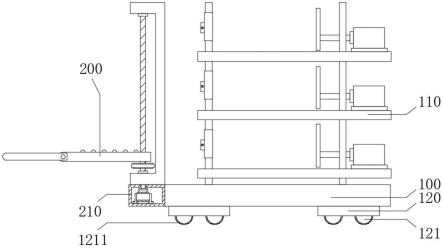
26.图1是本技术实施方式提供的一种重型设备水平搬运用地坦克的结构示意图;
27.图2为本技术实施方式提供的升降机构的结构示意图;
28.图3为本技术实施方式提供的支撑板的俯视图;
29.图4为本技术实施方式提供的图2中框体和延伸座的侧视图;
30.图5为本技术实施方式提供的放置架的结构示意图;
31.图6为本技术实施方式提供的图5中放置架的左视图。
32.图中:100-基座;110-放置架;111-竖杆;112-横板;113-套筒;114-盖板;115-气缸;116-推板;117-连接座;1171-顶杆;120-底座箱;121-轮体;1211-硬质防滑垫;200-升降机构;210-延伸座;211-电机;220-框体;221-螺杆;2211-齿轮;222-支撑板;2221-安装槽;2222-导向轮;223-上料板。
具体实施方式
33.下面将结合本技术实施例中的附图,对本技术实施例中的技术方案进行描述。
34.为使本技术实施方式的目的、技术方案和优点更加清楚,下面将结合本技术实施方式中的附图,对本技术实施方式中的技术方案进行清楚、完整地描述,显然,所描述的实施方式是本技术一部分实施方式,而不是全部的实施方式。基于本技术中的实施方式,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施方式,都属于本技术保护的范围。
35.请参阅图1-6,本技术提供重型设备水平搬运用地坦克,包括基座100和升降机构200,基座100顶部设置有放置架110,基座100底部设置有底座箱120,底座箱120底部开口设置,底座箱120设置有四个,四个底座箱120分别设置于基座100底面靠近四个端角处,底座箱120内部转动安装有轮体121,升降机构200包括延伸座210和框体220,延伸座210设置于基座100一端,框体220在延伸座210顶部设置有两个,两个框体220沿前后方向分布,框体220内侧转动安装有螺杆221,框体220内侧设置有支撑板222,两个螺杆221传动连接,支撑板222设置有一个,支撑板222分别与两个螺杆221螺纹套接,延伸座210内部固定有电机211,电机211输出轴与螺杆221传动连接。
36.在一些具体的实施方案中,两个螺杆221底部外壁均固定套接有齿轮2211,两个齿轮2211通过同步带传动连接,因为两个齿轮2211通过同步带传动连接,所以两个螺杆221之间也为同步转动的关系,此种设计以便简单实现电机211启动而带动两个螺杆221同时转动的工作过程。
37.在一些具体的实施方案中,支撑板222顶部开设有安装槽2221,安装槽2221内部转动安装有若干个导向轮2222,若干个导向轮2222呈均匀分布,导向轮2222转动安装在安装槽2221的设置,使得导向轮2222一部分位于安装槽2221内,而另一部分为支撑板222顶部,当搬运的设备放在支撑板222上时,通过若干个导向轮2222均匀分布的设置,以便对放置后的设备进行移动。
38.在一些具体的实施方案中,支撑板222远离框体220的一端铰接安装有上料板223,在搬运工作前,将支撑板222移动至较低位置,转动上料板223,使得上料板223远离支撑板
222的一端搭接在地面上,以便使得地面上的设备通过倾斜放置后的上料板223而移动至支撑板222顶部。
39.在一些具体的实施方案中,放置架110包括竖杆111和横板112,竖杆111设置有四个,四个竖杆111分别设置于基座100顶面靠近四个端角处,横板112四个端角位置分别固定套接于相邻近的竖杆111,横板112设置有若干个,若干个横板112呈等距分布,横板112四个端角位置分别固定套接于相邻近的竖杆111的设置,以使得设备可通过不同位置上相邻两个竖杆111之间的区域而放置在横板112上,若干个横板112的设置,以便放置较多数量的设备。
40.在一些具体的实施方案中,一侧的两个竖杆111外部均设置有套筒113,两个套筒113均活动套设在竖杆111外部,套筒113内部设置有轴承,套筒113通过其内部的轴承与竖杆111转动连接,两个套筒113相对一端均设置有盖板114,两个相对的盖板114活动连接,若干个横板112顶部设置有气缸115,气缸115输出轴连接有推板116,转动两个相对齐的套筒113,使得一侧两个沿前后方向分布的盖板114处于张开状态,将设备通过两个前后方向竖杆111之间的区域而放在横板112上,再转动套筒113,使得两个盖板114之间处于闭合状态,其中气缸115的输出轴穿过前后方向分布两个竖杆111之间的区域,启动气缸115以使得推板116向一侧移动,以便抵紧放置后的设备。
41.在一些具体的实施方案中,两个相对的盖板114一侧均设置有连接座117,一个连接座117上螺纹贯穿有顶杆1171,另一个连接座117上开设有可供顶杆1171插接的插槽,在两个盖板114相对齐后,旋动一个连接座117上的顶杆1171,使得顶杆1171进入另一个连接座117上的插槽,从而完成两个连接座117的连接过程,最终完成两个相对齐盖板114之间的连接过程。
42.在一些具体的实施方案中,顶杆1171一端设置有转手,转手的设置,以便转动顶杆1171。
43.在一些具体的实施方案中,处于同一个底座箱120内的轮体121对称设置有两个,通过处于同一个底座箱120内的轮体121对称设置有两个的设计,以使得每个底座箱120的底部均可在地面上进行平稳的移动。
44.在一些具体的实施方案中,轮体121外圈设置有硬质防滑垫1211,硬质防滑垫1211可设置为硬质的防滑材料,具体型号在此不多赘述,通过硬质防滑垫1211设置在轮体121外圈的设计,以提高轮体121与地面接触时的摩擦力。
45.该重型设备水平搬运用地坦克的工作原理:通过基座100下方转动安装的轮体121,以便对基座100进行移动,将基座100移动到合适位置后,启动电机211,其中电机211输出轴依次贯穿延伸座210和框体220且与一个螺杆221相连,而两个螺杆221传动连接,所以两个螺杆221将进行同步转动,因为支撑板222分别与两个螺杆221螺纹套接,所以支撑板222将进行竖向移动,使得支撑板222处于较低位置,将需要搬运的设备放在支撑板222上,并再次启动电机211,使得支撑板222向上移动,因为放置架110上设置有多个放置的隔层,在支撑板222向上移动至合适位置后,将设备通过两个框体220之间的区域而移动至放置架110上不同位置的隔层,从而完成设备的放置过程,通过轮体121以便对设备进行移动,从而完成设备的搬运过程。
46.需要说明的是,气缸115与电机211具体的型号规格需根据该装置的实际规格等进
行选型确定,具体选型计算方法采用本领域现有技术,故不再详细赘述。
47.气缸115与电机211的供电及其原理对本领域技术人员来说是清楚的,在此不予详细说明。
48.以上所述仅为本技术的实施例而已,并不用于限制本技术的保护范围,对于本领域的技术人员来说,本技术可以有各种更改和变化。凡在本技术的精神和原则之内,所作的任何修改、等同替换、改进等,均应包含在本技术的保护范围之内。应注意到:相似的标号和字母在下面的附图中表示类似项,因此,一旦某一项在一个附图中被定义,则在随后的附图中不需要对其进行进一步定义和解释。
49.以上所述,仅为本技术的具体实施方式,但本技术的保护范围并不局限于此,任何熟悉本技术领域的技术人员在本技术揭露的技术范围内,可轻易想到变化或替换,都应涵盖在本技术的保护范围之内。因此,本技术的保护范围应所述以权利要求的保护范围为准。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1