背景技术:
1、自动驾驶车辆的导航依赖于追踪车道上车辆位置前面的检测物体和/或多条车道中的道路用户。精确追踪车辆正在其上行驶或将在其上行驶的车道上的物体对巡航控制、碰撞避免/缓解或紧急制动这样的系统是必要的。
2、车辆可能需要驶出它们的规划车道以避开它们前面的障碍物。然而,自动驾驶车辆可以被编程为基于检测到的边缘和边界而沿着车道行驶以例如防止车道外(out-of-lane)违规。通常,当自动驾驶车辆遇到停放的物体时,其对情况的初步评估可能是减速或停止。然而,当这种情况发生时自动驾驶车辆可能停止很长一段时间。例如,在城市中,送货卡车可能停放在路边,但卡车车身的一部分占用道路的一部分。如果自动驾驶车辆保持停在停放的送货卡车的后面直到卡车从它的位置移动,则这将延迟车辆的行驶并且造成额外的交通阻塞。
3、因此,需要识别何时车辆可以安全地驶出车道。本文件描述针对解决上面描述的问题和/或其他问题的方法和系统。
技术实现思路
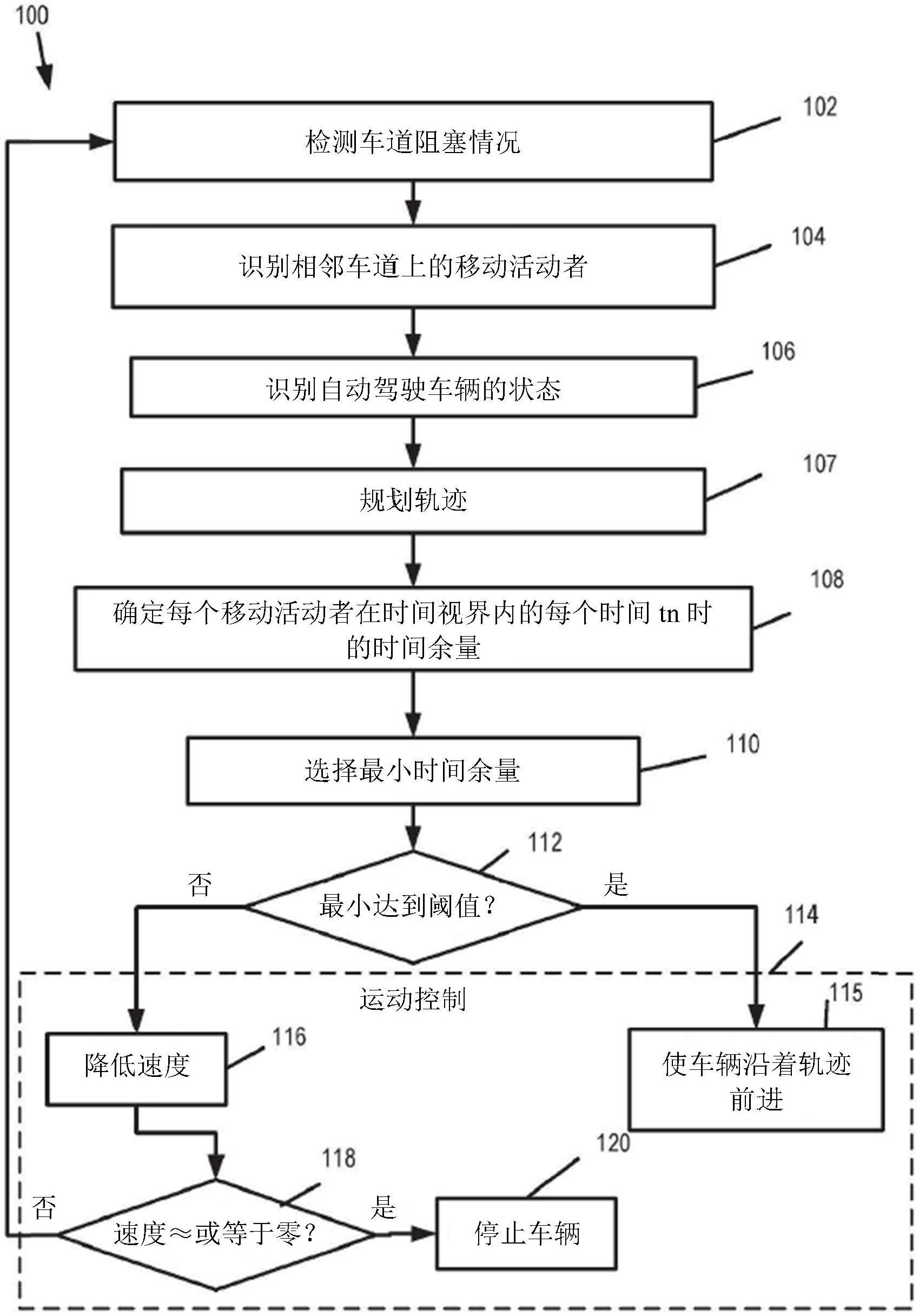
1、在各种场景中,在协助导航车辆绕过障碍物的方法中,自动驾驶车辆的感知系统的一个或多个传感器可以获取表示由自动驾驶车辆行驶的第一车道上的车道阻塞情况的数据以及表示与第一车道相邻的第二车道上的移动活动者(actor)的数据。包括车辆的计算装置的系统将包括编程指令,编程指令配置成使系统的处理器使车辆的运动控制系统在第一车道上移动车辆。系统从传感器接收对应于第一车道上的车道阻塞情况的实时传感器数据。系统从传感器接收对应于与第一车道相邻的第二车道上的移动活动者的实时传感器数据。系统可以规划车辆绕过车道阻塞情况的轨迹。轨迹可以包括第二车道上的一个或多个位置。对于时间视界内的多个时间tn中的每一个,系统可以通过测量在时间tn时移动活动者的预测状态和自动驾驶车辆的预测状态之间的各自时间量来确定时间余量。系统可以识别确定的时间余量中的最小时间余量并且确定最小时间余量是否等于或大于所需时间缓冲。如果最小时间余量等于或大于所需时间缓冲,则系统可以生成运动控制信号以使自动驾驶车辆遵循轨迹并且绕过车道阻塞情况转向到第二车道中。否则,系统可以生成运动控制信号以使自动驾驶车辆降低速度或停止。
2、在某些场景中,当最小时间余量不等于或大于所需时间缓冲时,系统可以在继续监控移动活动者时使自动驾驶车辆降低自动驾驶车辆的速度。
3、在某些场景中,当系统继续监控移动活动者时,系统可以进一步地确定在更新时间视界内在每个时间tn时的更新时间余量,识别更新时间余量中的最小更新时间余量,并且确定最小更新时间余量等于还是大于所需时间余量。
4、在某些场景中,系统可以将所需时间缓冲确定为自动驾驶车辆可以转向到第二车道中的横向距离的函数。
5、此外或可替代地,系统可以将所需时间缓冲确定为自动驾驶车辆的速度的函数。
6、在某些场景中,系统可以确定沿着轨迹的一部分的开始时间。开始时间可以对应于轨迹上的一个或多个位置的第一位置。系统可以确定沿着轨迹的一部分的结束时间。结束时间对应于轨迹上的一个或多个位置的最后位置。系统可以将时间视界确定为开始时间和结束时间之间的时间度量。
7、在确定时间余量的过程中,系统可以通过以下方式确定在时间视界内的多个时间tn中的每一个的时间余量:a)确定在时间视界内的每个时间tn时移动活动者的预测状态;b)确定在自动驾驶车辆遵循轨迹进入第二车道中时预测移动活动者状态将小于距离自动驾驶车辆的阈值安全距离的第一时间;以及c)对于每个时间tn,测量时间余量作为a)和b)之间的时间度量。
8、在某些场景中,系统可以使用获取的移动活动者的数据对移动活动者进行分类。系统可以使用获取的车道阻塞情况的数据对导致车道阻塞情况的第一车道上的物体进行分类。
技术特征:1.一种方法,所述方法包括:
2.根据权利要求1所述的方法,其中当所述最小时间余量不等于或大于所述所需时间缓冲时,生成所述运动控制信号包括在继续监控所述移动活动者时降低所述自动驾驶车辆的速度。
3.根据权利要求2所述的方法,其中继续监控所述移动活动者包括:
4.根据权利要求1所述的方法,所述方法进一步地包括将所述所需时间缓冲确定为所述自动驾驶车辆转向到所述第二车道中的横向距离的函数。
5.根据权利要求4所述的方法,所述方法进一步地包括还基于所述自动驾驶车辆的速度来确定所述所需时间缓冲变化。
6.根据权利要求1所述的方法,所述方法进一步地包括:
7.根据权利要求6所述的方法,其中对于所述时间视界内的所述多个时间tn中的每一个确定所述时间余量进一步地包括:
8.根据权利要求1所述的方法,所述方法进一步地包括通过所述自动驾驶车辆的处理器:
9.根据权利要求8所述的方法,其中所述轨迹的规划包括:
10.根据权利要求9所述的方法,其中所述第一车道上的所述物体包括以下中的一个:
11.一种用于自动驾驶车辆的控制系统,所述系统包括:
12.根据权利要求11所述的控制系统,所述控制系统进一步地包括编程指令,所述编程指令在所述最小时间余量不等于或大于所述所需时间缓冲时使所述处理器在继续监控所述移动活动者时使所述自动驾驶车辆降低所述自动驾驶车辆的速度。
13.根据权利12所述的控制系统,其中所述编程指令使所述处理器继续监控所述移动活动者进一步地包括以下编程指令:
14.根据权利要求11所述的控制系统,所述控制系统进一步地包括编程指令,所述编程指令在由所述处理器执行时将使所述处理器将所述所需时间缓冲确定为所述自动驾驶车辆转向到所述第二车道中的横向距离的函数。
15.根据权利要求14所述的控制系统,所述控制系统进一步地包括编程指令,所述编程指令在由所述处理器执行时使所述处理器也将所述所需时间缓冲确定为所述自动驾驶车辆的速度的函数。
16.根据权利要求11所述的控制系统,所述控制系统进一步地编程指令,所述编程指令在由所述处理器执行时将使所述处理器:
17.根据权利要求16所述的控制系统,其中所述编程指令在由所述处理器执行时将使所述处理器对于所述时间视界内的所述多个时间tn中的每一个确定所述时间余量进一步地包括以下编程指令:
18.根据权利要求11所述的控制系统,所述控制系统进一步地包括在由所述处理器执行时将使所述处理器执行以下操作的编程指令:
19.根据权利要求18所述的控制系统,其中在由所述处理器执行时将使所述处理器规划所述轨迹的所述编程指令进一步地包括以下编程指令:
20.一种存储指令的非暂时性计算机可读介质,所述指令在由至少一个计算装置执行时配置成使所述至少一个计算装置执行包括以下的操作:
技术总结本发明提供用于导航车辆绕过车道阻塞物安全地转向到相邻车道中的系统和方法。系统可以规划绕过阻塞车道的轨迹。在时间视界内,系统通过测量在相邻车道上的移动活动者的预测状态和车辆的预测状态之间的时间量来确定时间余量。系统识别时间余量中的最小时间余量并且确定最小时间余量是否等于或大于所需时间缓冲。如果最小时间余量等于或大于所需时间缓冲,则系统生成运动控制信号以使车辆遵循轨迹以绕过阻塞物转向到相邻车道中。否则,系统生成运动控制信号以使车辆降低速度或停止。
技术研发人员:马克·奥利斯
受保护的技术使用者:福特全球技术公司
技术研发日:技术公布日:2024/1/15