自动驾驶辅助装置的制作方法
本申请涉及自动驾驶辅助装置。
背景技术:
1、作为在驾驶辅助中产生异常的情况下通过控制的变更来处理的技术的示例,存在专利文献1那样的技术。专利文献1的技术中,在针对电动助力转向装置的转向用电动机的电流指示值检测到异常的情况下,根据车辆的偏航角速度,计算使与电流指示值相反方向的计数器电流流过的电流指示值,从而抑制车辆的旋转方向的运动,防止车辆行为的不稳定化。
2、此外,作为在驾驶辅助中产生异常的情况下进行处理的技术的其它示例,存在专利文献2那样的技术。专利文献2的技术中,在第1传感器异常时,使用第2传感器来继续进行驾驶辅助。或者,在第1偏航角速度传感器异常时,根据转向角和车辆速度来推定偏航角速度,并基于推定出的偏航加速度来决定目标转向角即转向角指令值,以进行目标轨道追踪控制。
3、现有技术文献
4、专利文献
5、专利文献1:日本专利特开2019-014432号公报
6、专利文献2:日本专利特开2018-192865号公报
技术实现思路
1、发明所要解决的技术问题
2、然而,专利文献1的技术中,能处理电流指示值的异常,但存在如下问题:对于根据电流指示值来控制流过转向用电动机的电流的驱动电路和控制装置等转向用电动机的控制系统的异常,无法进行处理。此外,并非确定与电流指示值的生成有关的哪个结构要素产生了异常,而只是单纯地计算流过抑制偏航加速度的计数器电流的电流指示值。由此,没有进行适合于异常状态的控制,虽然可以防止车辆行为的不稳定化,但存在无法继续进行跟随目标行驶轨道的驾驶辅助的问题。
3、专利文献2中,在第1传感器异常时,使用了第2传感器,由于传感器的冗余化,存在成本变高的问题。此外,虽然也能推定偏航角速度,但在偏航角速度传感器以外产生异常的情况下,存在无法继续进行驾驶辅助的问题。特别地,存在对于上述转向用电动机的控制系统的异常无法进行处理的问题。
4、因此,本申请的目的在于提供一种自动驾驶辅助装置,在检测到转向用电动机的驱动电路和控制装置等转向用电动机的控制系统的异常时,能使自动转向继续。
5、用于解决技术问题的技术手段
6、本申请所涉及的自动驾驶辅助装置包括:
7、自动转向控制部,该自动转向控制部检测本车辆的行驶状态和本车辆的周边状态,基于检测出的行驶状态和周边状态来计算本车辆的转向装置的转向角指令值;
8、转向用电动机,该转向用电动机驱动所述转向装置;
9、电动机驱动电路,该电动机驱动电路具有开关元件,使提供给所述转向用电动机的电力进行导通关断;
10、转向角控制部,该转向角控制部基于所述转向角指令值和转向角检测值,来计算与所述转向用电动机的输出转矩有关的电动机输出指令值;以及
11、电动机控制部,该电动机控制部基于所述电动机输出指令值,来生成使所述电动机驱动电路的所述开关元件导通关断的驱动信号;以及
12、异常检测部,该异常检测部检测所述转向用电动机的控制系统所产生的异常即转向用电动机相关异常,
13、在检测到所述转向用电动机相关异常时,所述电动机控制部基于所述电动机输出指令值,来生成与所述转向用电动机相关异常的内容相对应的异常时的驱动信号。
14、发明效果
15、根据本申请所涉及的自动驾驶辅助装置,在发生转向用电动机相关异常的情况下,也能生成异常时的驱动信号,并通过转向用电动机继续转向装置的驱动,以使自动转向继续。通过继续自动转向,从而能给驾驶员带来安全感。无需追加仅用于异常时的硬件,仅通过生成异常时的驱动信号的处理即可,能抑制成本增加。
技术特征:
1.一种自动驾驶辅助装置,其特征在于,包括:
2.如权利要求1所述的自动驾驶辅助装置,其特征在于,包括:
3.如权利要求1或2所述的自动驾驶辅助装置,其特征在于,
4.如权利要求3所述的自动驾驶辅助装置,其特征在于,
5.如权利要求1至4中的任一项所述的自动驾驶辅助装置,其特征在于,
6.如权利要求1至5中的任一项所述的自动驾驶辅助装置,其特征在于,
7.如权利要求1至5中的任一项所述的自动驾驶辅助装置,其特征在于,
8.如权利要求7所述的自动驾驶辅助装置,其特征在于,
9.如权利要求1至5中的任一项所述的自动驾驶辅助装置,其特征在于,
10.如权利要求1至5中的任一项所述的自动驾驶辅助装置,其特征在于,
11.如权利要求10所述的自动驾驶辅助装置,其特征在于,
12.如权利要求1至5中的任一项所述的自动驾驶辅助装置,其特征在于,
13.如权利要求12所述的自动驾驶辅助装置,其特征在于,
14.如权利要求1至13中的任一项所述的自动驾驶辅助装置,其特征在于,
15.如权利要求1至14中的任一项所述的自动驾驶辅助装置,其特征在于,
16.如权利要求15所述的自动驾驶辅助装置,其特征在于,
技术总结
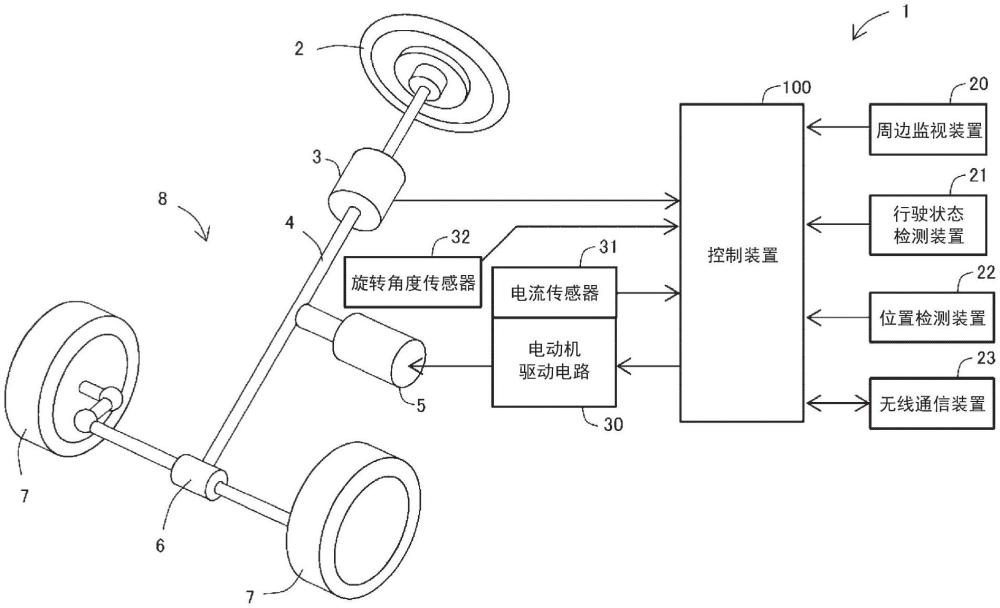
本发明提供自动驾驶辅助装置,在检测到转向用电动机的驱动电路和控制装置等转向用电动机的控制系统的异常时,能使自动转向继续。自动驾驶辅助装置(1)包括:自动转向控制部(120),其基于检测出的行驶状态和周边状态来计算本车辆的转向装置的转向角指令值;转向用电动机(5);电动机驱动电路(30);转向角控制部(130),其基于转向角指令值和转向角检测值来计算电动机输出指令值;电动机控制部(150),其基于电动机输出指令值来生成电动机驱动电路的驱动信号;以及异常检测部(160),电动机控制部(150)生成与转向用电动机相关异常的内容相对应的异常时的驱动信号。
技术研发人员:藤本千明,北川润,折井将彦,家造坊勋
受保护的技术使用者:三菱电机株式会社
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!