机器人脚部的连接结构及其控制方法、设备和存储介质与流程
本申请涉及机器人,尤其涉及一种机器人脚部的连接结构及其控制方法、设备和存储介质。
背景技术:
1、一般能够实现正常行走和站立的仿真机器人,其结构都是比较复杂的,这些仿真机器人运行时,需要实时计算机器人脚面角度,以保证机器人能够行走和站立,但是,由于其结构的复杂性,导致通过几何的方式计算脚面角度是非常困难的。同时在结构设计和实际生产会产生误差,几何方法并不能做到精准计算。由于结构的复杂性,通过传统几何方法还会导致累计误差。这些困难都不利于精准地控制机器人脚面角度。基于此,亟需一种新的更精准,简单的控制方法。
技术实现思路
1、有鉴于此,本申请提出了一种机器人脚部的连接结构及其控制方法、设备和存储介质,用于解决机器人脚面角度难以控制的问题。
2、为达上述之一或部分或全部目的或是其他目的,本申请提出一种机器人脚部的连接结构,该连接结构包括:
3、小腿部,其具有远端和近端,所述远端设有第一电机基座,该第一电机基座包括第一安装位和第二安装位;
4、脚部,其脚踝位置设有球头基座,脚后跟位置设有第二电机基座,该第二电机基座包括第三安装位和第四安装位;
5、第一伸缩电机,其固定端连接至所述第一安装位,伸缩端连接至第三安装位;
6、第二伸缩电机,其固定端连接至所述第二安装位,伸缩端连接至第四安装位;
7、球头摆杆,其具有相互连接的杆部和球头,该杆部连接所述近端,该球头连接所述球头基座;
8、第一imu,其设置在所述小腿部上;以及
9、第二imu,其设置在所述脚部上。
10、进一步地,所述第一电机基座具有一空腔,所述空腔内还设有连接于一侧壁的挂耳,该挂耳将所述第一电机基座分隔成第一安装位和第二安装位。
11、进一步地,所述连接结构还包括:第一连接销和第二连接销;所述空腔相对的两侧壁分别设有第一通孔和第二通孔,其中,
12、所述第一连接销依次穿过所述第一通孔和所述第一伸缩电机的固定端,并穿入所述挂耳,形成第一活动连接结构,第一伸缩电机可绕第一连接销转动;所述第二连接销依次穿过所述第二通孔和所述第二伸缩电机的固定端,并穿入所述挂耳,形成第二活动连接结构,第二伸缩电机可绕第二连接销转动。
13、进一步地,所述第二电机基座包括:两块固定板以及连接柱;其中,
14、所述两块固定板连接在所述脚部的脚后跟位置,所述连接柱一端连接一固定板,另一端连接另一固定板;所述第三安装位位于一固定板远离所述连接柱的一侧,所述第三安装位具有连接至所述连接柱的第一螺纹孔;所述第四安装位位于另一固定板远离所述连接柱的一侧,所述第四安装位具有连接至所述连接柱的第二螺纹孔。
15、进一步地,所述连接结构还包括:第一铰接接头和第二铰接接头;其中,
16、所述第一铰接接头的一端铰接所述第一伸缩电机的伸缩端,另一端连接至所述第一连接孔;所述第二铰接接头的一端铰接所述第二伸缩电机的伸缩端,另一端连接至所述第二连接孔。
17、为达上述之一或部分或全部目的或是其他目的,本申请还提出一种机器人脚部的连接结构的控制方法,所述控制方法基于上述任一项所述的机器人脚部的连接结构,包括步骤:
18、步骤s1:接收将机器人脚面角度调整为期望脚面角度的控制指令,并将所述期望脚面角度转换为踝关节角度;
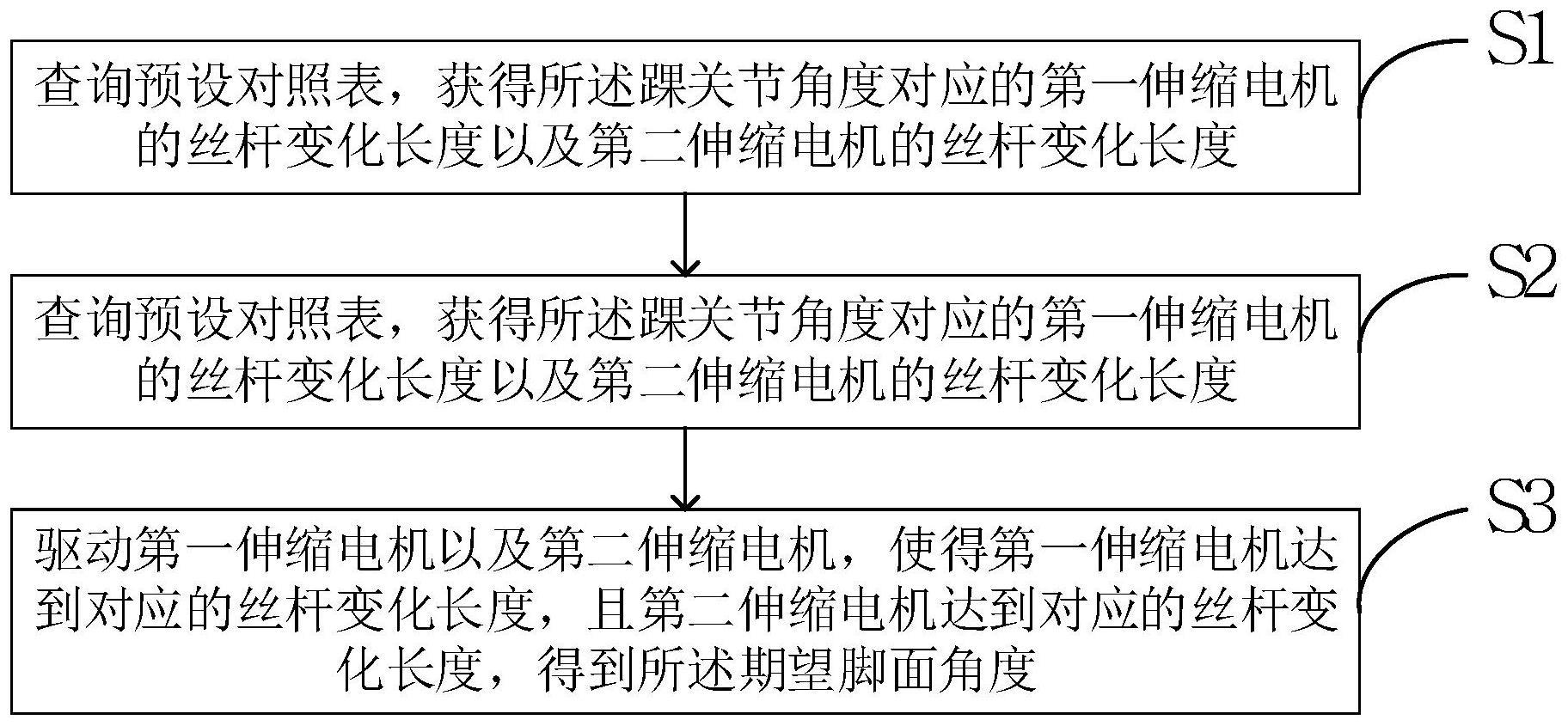
19、步骤s2:查询预设对照表,获得所述踝关节角度对应的第一伸缩电机的丝杆变化长度以及第二伸缩电机的丝杆变化长度;
20、步骤s3:驱动第一伸缩电机以及第二伸缩电机,使得第一伸缩电机达到对应的丝杆变化长度,且第二伸缩电机达到对应的丝杆变化长度,得到所述期望脚面角度。
21、进一步地,所述接收将机器人脚面角度调整为期望脚面角度的控制指令,并将所述期望脚面角度转换为踝关节角度的步骤之前,包括步骤:
22、步骤s10:在预设时间内随机驱动第一伸缩电机和第二伸缩电机;
23、步骤s20:记录驱动停止后当前第一伸缩电机的丝杆变化长度,以及记录当前第二伸缩电机的丝杆变化长度;
24、步骤s30:获取当前第一imu以及第二imu的读数,并记录由第一imu以及第二imu角度差获得的踝关节角度;
25、步骤s40:判断任一踝关节角度区间的对应角度值是否都获取到对应的丝杆变化长度数值,如果是则进入步骤s50,如果否则返回步骤s10;其中,所述踝关节角度区间为踝关节角度的连续数值超过预设数量的区间。
26、步骤s50:结束采样,并根据踝关节角度区间与对应的丝杆变化长度数值的线性关系生成预设对照表。
27、进一步地,所述接收将机器人脚面角度调整为期望脚面角度的控制指令,并将所述期望脚面角度转换为踝关节角度的步骤之前,包括步骤:
28、步骤s100:将第一伸缩电机的丝杆和第二伸缩电机的丝杆驱动至初始位置,获取当前第一imu以及第二imu的读数,并记录由第一imu以及第二imu角度差获得的踝关节角度;
29、步骤s200:以循环步进的方式,将第一伸缩电机的丝杆和第二伸缩电机的丝杆向结束位置驱动;任一步进结束之后,获取该次步进后第一伸缩电机的丝杆变化长度,以及第二伸缩电机的丝杆变化长度,同时获取该次步进后第一imu以及第二imu的读数,并记录由第一imu以及第二imu角度差获得的踝关节角度;
30、步骤s300:判断第一伸缩电机的丝杆和第二伸缩电机的丝杆是否均到达结束位置;若未到达结束位置,则返回步骤s200;若到达结束位置,则结束采样,生成预设对照表。
31、为达上述之一或部分或全部目的或是其他目的,本申请还提出一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,所述处理器执行所述计算机程序时实现上述任一项所述机器人脚部的连接结构的控制方法的步骤。
32、为达上述之一或部分或全部目的或是其他目的,本申请还提出一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现上述任一项所述机器人脚部的连接结构的控制方法的步骤。
33、实施本申请实施例,将具有如下有益效果:
34、本申请提出的机器人脚部的连接结构的控制方法,包括步骤:步骤s1:接收将机器人脚面角度调整为期望脚面角度的控制指令,并将期望脚面角度转换为踝关节角度;步骤s2:查询预设对照表,获得踝关节角度对应的第一伸缩电机的丝杆变化长度以及第二伸缩电机的丝杆变化长度;步骤s3:驱动第一伸缩电机以及第二伸缩电机,使得第一伸缩电机达到对应的丝杆变化长度,且第二伸缩电机达到对应的丝杆变化长度,得到期望脚面角度。本申请提出的控制方法,可以根据查预设对照表的方式来控制伸缩电机,最终控制机器人脚面角度。此方法可以不考虑机器人复杂的结构,直接对其踝关节的角度进行计算,做到更精准的控制。
技术特征:
1.一种机器人脚部的连接结构,其特征在于:该连接结构包括:
2.根据权利要求1所述的机器人脚部的连接结构,其特征在于:所述第一电机基座具有一空腔,所述空腔内还设有连接于一侧壁的挂耳,该挂耳将所述第一电机基座分隔成第一安装位和第二安装位。
3.根据权利要求2所述的机器人脚部的连接结构,其特征在于:所述连接结构还包括:第一连接销和第二连接销;所述空腔相对的两侧壁分别设有第一通孔和第二通孔,其中,
4.根据权利要求1所述的机器人脚部的连接结构,其特征在于:所述第二电机基座包括:两块固定板以及连接柱;其中,
5.根据权利要求4所述的机器人脚部的连接结构,其特征在于:所述连接结构还包括:第一铰接接头和第二铰接接头;其中,
6.一种机器人脚部的连接结构的控制方法,其特征在于:所述控制方法基于权利要求1至5任一项所述的机器人脚部的连接结构,包括步骤:
7.根据权利要求6所述的机器人脚部的连接结构的控制方法,其特征在于:所述接收将机器人脚面角度调整为期望脚面角度的控制指令,并将所述期望脚面角度转换为踝关节角度的步骤之前,包括步骤:
8.根据权利要求6所述的机器人脚部的连接结构的控制方法,其特征在于:所述接收将机器人脚面角度调整为期望脚面角度的控制指令,并将所述期望脚面角度转换为踝关节角度的步骤之前,包括步骤:
9.一种计算机设备,包括存储器和处理器,所述存储器中存储有计算机程序,其特征在于,所述处理器执行所述计算机程序时实现权利要求6至8中任一项所述机器人脚部的连接结构的控制方法的步骤。
10.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现权利要求6至8中任一项所述机器人脚部的连接结构的控制方法的步骤。
技术总结
本申请实施例属于机器人技术领域,提出了一种机器人脚部的连接结构及其控制方法、设备和存储介质,其中,控制方法包括步骤:步骤S1:接收将机器人脚面角度调整为期望脚面角度的控制指令,并将期望脚面角度转换为踝关节角度;步骤S2:查询预设对照表,获得踝关节角度对应的第一伸缩电机的丝杆变化长度以及第二伸缩电机的丝杆变化长度;步骤S3:驱动第一伸缩电机以及第二伸缩电机,使得第一伸缩电机达到对应的丝杆变化长度,且第二伸缩电机达到对应的丝杆变化长度,得到期望脚面角度。本申请提出的控制方法,可以根据查预设对照表的方式来控制伸缩电机,最终控制机器人脚面角度。此方法解决了期望脚面角度和伸缩电机之间复杂的计算方式。
技术研发人员:杨华,宋华,詹犇,濮正楠
受保护的技术使用者:广东纯米电器科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!