一种控制方法、控制装置、计算机可读存储介质及车辆与流程
本申请涉及车辆领域,具体地,涉及一种车辆控制方法、控制装置、计算机可读存储介质以及车辆。
背景技术:
1、随着科技的发展,消费者对于车辆的性能以及体验要求越来越高,对于车辆的智能化以及便捷性上的要求也越来越高了,而现有的车辆在狭窄或者拥挤路面上的通过性由于各方面的限制,并不是很高,由此给众多消费者造成了不便。
技术实现思路
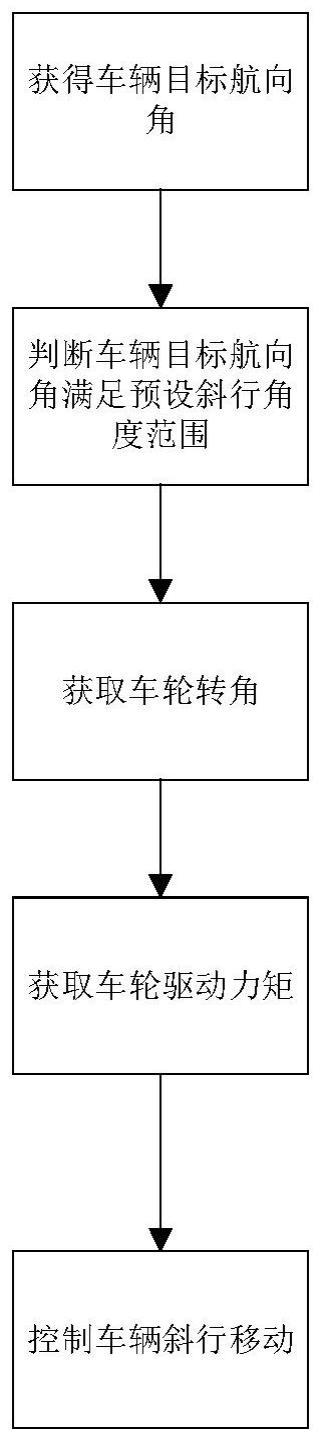
1、本申请旨在至少在一定程度上解决上述技术中的技术问题之一。为此,本申请的第一个目的在于提出一种车辆控制方法,所述方法适用于四轮转向的车辆,包括以下步骤:获取车辆当前位置以及车辆目标位置;根据所述车辆当前位置以及所述车辆目标位置得到车辆目标航向角,其中,所述车辆目标航向角为所述车辆当前位置和所述车辆目标位置的连线方向与车辆所处道路在车辆当前位置的切线方向形成的夹角;判断所述车辆目标航向角在预设斜行角度范围内,则控制所述车辆以斜行方式从车辆当前位置移动到车辆目标位置。
2、根据车辆当前位置以及车辆目标位置来得到车辆的目标航向角,然后判断目标航向角是否在预设范围内,如果在预设范围内,则控制车辆斜行,以使得车辆能够从当前位置移动到目标位置,极大的简化了人为操作的影响,通过自动控制能够非常精准的并且方便的在狭窄路面、拥挤路面通行,或者也方便与侧方位停车,还能够很方便通过绕杆测试等,以提高车辆的操控性。
3、根据本申请的一些实施例,所述“判断所述车辆目标航向角在预设斜行角度范围内”为:判断所述车辆目标航向角满足:-|(δfnax+δrmax)|/2≤θ≤|(δfmax+δrmax)|/2;其中,δfmax为车辆前轮极限转向角度值,δrmax为车辆后轮极限转向角度值,θ为车辆目标航向角。
4、根据本申请的一些实施例,通过下述公式得到所述预设斜行角度范围:
5、
6、其中,m整车质量,θ为车辆目标航向角,v为质心速度,iz为绕质心的横摆转动惯量,cf为前轮等效侧偏刚度,cr为后轮等效偏转刚度,a为质心到前轴的距离,b为质心到后轴的距离,δf为前轮转向角度,δr为后轮转向角度,为车辆目标航向角的变化率;为横摆角速度的变化率。
7、根据本申请的一些实施例,所述“控制所述车辆采用斜行方式从车辆当前位置移动到车辆目标位置”还包括:获取表征车辆长度延伸方向的车身方向信息,根据所述车辆当前位置、所述车辆目标位置以及所述车身方向信息得到质心侧偏角;其中,所述质心侧偏角为车辆当前位置和车辆目标位置连线的方向与车辆的车身长度的延伸方向形成的夹角;控制车辆运动使得所述质心侧偏角与所述车辆目标航向角的差值小于预设阈值,并控制车辆采用斜行方式从车辆当前位置移动到车辆目标位置,其中所述车辆在采用斜行方式从车辆当前位置移动到车辆目标位置过程中,所述质心侧偏角与所述车辆目标航向角的差值小于预设阈值。
8、根据本申请的一些实施例,所述“控制车辆运动使得所述质心侧偏角与所述车辆目标航向角的差值小于预设阈值,并控制车辆采用斜行方式从车辆当前位置移动到车辆目标位置”还包括:获取车轮转向角度,根据所述车轮转向角度控制所述车辆采用斜行方式从车辆当前位置移动到车辆目标位置。
9、根据本申请的一些实施例,所述“获取车轮转向角度,根据所述车轮转向角度控制所述车辆采用斜行方式从车辆当前位置移动到车辆目标位置”还包括:根据所述车轮转向角度得到车轮驱动力矩;根据所述车轮转向角度以及车轮驱动转矩控制车辆采用斜行方式从车辆当前位置移动到车辆目标位置;其中,所述车轮转向角度包括前轮转向角度和后轮转向角度;所述车轮驱动转矩包括左前轮驱动转矩、右前轮驱动转矩、左后轮驱动转矩以及右后轮驱动转矩。
10、根据本申请的一些实施例,通过下述公式获得所述车辆驱动转矩:
11、
12、a(tfl+tfr)sinδf=b(tr1+trr)sinδr;
13、td=tf1+tr1+tfr+trr;
14、(tfl-tfr)/fzf=(trl-trr)/fzr;
15、其中,δm为维持车辆斜移所需的横摆力矩,b为轮距,r为车轮滚动半径,tf1为左前轮驱动力矩,tfr为右前轮驱动力矩,trl为左后轮驱动力矩,trr为右后轮驱动力矩,td为总需求力矩,fzf为前轴荷,fzr为后轴荷。
16、根据本申请的一些实施例,所述控制所述车辆以斜行方式从车辆当前位置移动到车辆目标位置包括:在控制所述车辆以斜行方式从车辆当前位置移动到车辆目标位置过程中,所述车辆的横摆角速度需满足:-3deg/s<ωr<3deg/s;其中,ωr为横摆角速度。
17、为达到上述目的,本申请另一方面实施例提出了一种控制装置,包括:存储器;处理器,所述存储器存储有一个或多个指令,当一个或多个所述指令被处理器执行时,使得所述控制装置实现上述方法。
18、为达到上述目的,本申请另一方面实施例提出一种车辆,所述车辆包括上述控制装置。
19、为达到上述目的,本申请另一方面实施例提出一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时,实现上述车辆控制方法。
技术特征:
1.一种车辆控制方法,其特征在于,适用于四轮转向的车辆,包括以下步骤:
2.如权利要求1所述的车辆控制方法,其特征在于,所述“判断所述车辆目标航向角在预设斜行角度范围内”为:
3.如权利要求1所述的车辆控制方法,其特征在于,通过下述公式得到所述预设斜行角度范围:
4.根据权利要求1所述的车辆控制方法,其特征在于,所述“控制所述车辆采用斜行方式从车辆当前位置移动到车辆目标位置”还包括:
5.根据权利要求4所述的车辆控制方法,其特征在于,所述“控制车辆运动使得所述质心侧偏角与所述车辆目标航向角的差值小于预设阈值,并控制车辆采用斜行方式从车辆当前位置移动到车辆目标位置”还包括:
6.根据权利要求5所述的车辆控制方法,其特征在于,所述“获取车轮转向角度,根据所述车轮转向角度控制所述车辆采用斜行方式从车辆当前位置移动到车辆目标位置”还包括:
7.根据权利要求6所述的车辆控制方法,其特征在于,通过下述公式获得所述车辆驱动转矩:
8.如权利要求1-7任一项所述的车辆控制方法,其特征在于,所述控制所述车辆以斜行方式从车辆当前位置移动到车辆目标位置包括:
9.一种车辆控制装置,其特征在于,包括:
10.一种车辆,其特征在于,所述车辆包括如权利要求9所述的控制装置。
11.一种计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时,实现如权利要求1-8中任一项所述的车辆控制方法。
技术总结
本公开涉及一种车辆控制方法、控制装置、计算机可读存储介质以及车辆,其中,车辆控制方法适用于四轮转向的车辆,包括获取车辆当前位置以及车辆目标位置;根据车辆当前位置以及车辆目标位置得到车辆目标航向角,其中,车辆航向角为车辆当前位置和车辆目标位置的连线方向与车辆所处道路在车辆当前位置的切线方向形成的夹角;判断车辆目标航向角在预设斜行角度范围内,则控制车辆以斜行方式从车辆当前位置移动到车辆目标位置,能够极大的简化人为操作的影响,通过自动控制能够非常精准的并且方便的在狭窄路面、拥挤路面通行,或者也方便与侧方位停车,还能够很方便通过绕杆测试等,以提高车辆的操控性。
技术研发人员:刘来林,刘鹏,童云春,王鑫,廖银生
受保护的技术使用者:比亚迪股份有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!