四轮独立转向系统及控制其的方法与流程
本公开的示例性实施例涉及一种四轮独立转向系统及控制其的方法,更具体地,涉及一种四轮独立转向系统及控制其的方法,其能够在根据前轮的转向角,控制后轮的转向角的四轮独立转向控制时,通过在跟随目标横摆率的同时即时调节转弯半径,来允许驾驶员感受动态转向。
背景技术:
1、最近,正在对轮内电动机系统进行研究,在该系统中,电动机分别嵌入车辆的四个车轮中,并独立地操作这四个车轮。
2、该轮内电动机系统可以有机地耦合到该车辆,以实现四轮独立驱动和四轮独立转向系统,从而提供更加灵活和多样的行驶性能。
3、普通车辆仅通过前轮转向来改变其行驶方向。为此,车辆的行驶方向与驾驶员的观察方向不一致,因为前轮和后轮产生横向力的时间点不同。然而,该四轮独立转向系统也应用于后轮,从而在驾驶员停车或低速转弯时减小车辆的旋转半径,并在驾驶员高速驾驶车辆时改变车辆方向时提高行驶稳定性。
4、在这种情况下,在相关技术中,为了确定前轮和后轮的传动比以控制四轮独立转向系统,该前轮和后轮的传动比是在横摆率值和侧滑角(车身滑移角)值收敛到零的假设下设定的。
5、因此,与相关技术中的两轮转向控制相比,四轮独立转向控制有利地实现了原装动态转向性能并减小了转弯半径。然而,如上所述,因为横摆率(横摆率=车辆速度/转弯半径)的值收敛到零,理论上不能减小转弯半径。也就是说,当横摆率为零时,转弯半径不可避免地增大,这导致难以展现原装四轮独立转向的优势的问题。在前轮和后轮的传动比被设定为固定目标值以实现动态转向性能的情况下,存在的问题是四轮独立转向控制的性能受到相当大的限制。
6、因此,需要一种四轮独立转向控制方法,该方法能够通过在控制四轮独立转向时,跟随目标横摆率的同时即时调节转弯半径来允许驾驶员感受动态转向。
7、本公开的背景技术在韩国专利no.10-2274120(于2021年7月1日注册,名称为“控制后轮转向系统的装置和方法”)中公开。
技术实现思路
1、各种实施例旨在提供一种四轮独立转向系统及控制其的方法,其能够在根据前轮的转向角,控制后轮的转向角的四轮独立转向控制时,通过在跟随目标横摆率的同时即时调节转弯半径,来允许驾驶员感受动态转向。
2、本发明要解决的技术问题不限于上述技术问题,本领域技术人员可以从下面的描述中清楚地理解上面没有提到的其他技术问题。
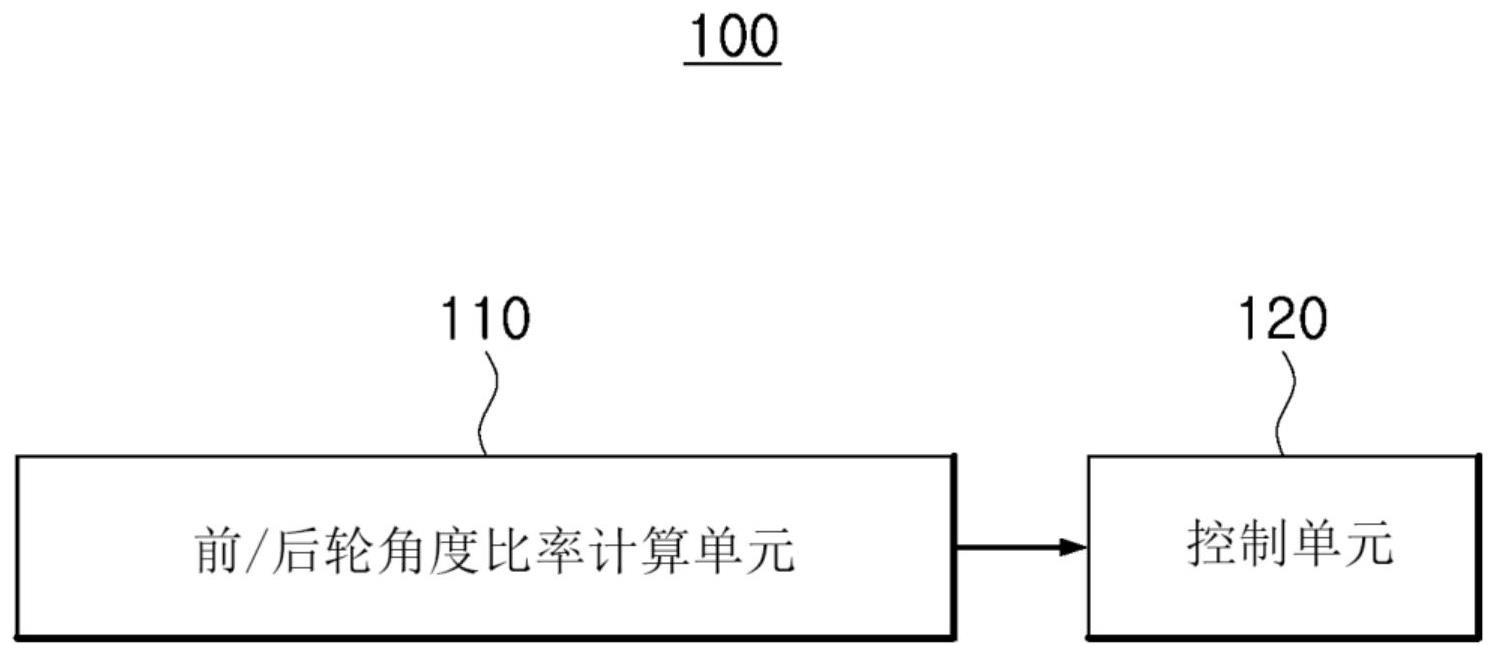
3、根据本公开的实施例的四轮独立转向系统包括:前/后轮角度比率计算单元,被配置为计算前轮角和后轮角之间的比率kss,该比率kss允许车身滑移角收敛到“0”并且允许横摆角和横摆率跟随目标值;以及控制单元,被配置为基于前轮角和后轮角之间的比率kss来执行四轮转向控制。
4、在本公开中,前/后轮角度比率计算单元可以通过调节增益g而调节目标转向不足梯度kus,来控制和改变前轮角和后轮角之间的比率kss。
5、在本公开中,前/后轮角度比率计算单元可以基于查找表lut来计算增益g,在查找表中存储了对应于转向角速度和转向角加速度的增益g。
6、在本公开中,前/后轮角度比率计算单元可以通过限制横摆率来限制前轮角和后轮角之间的比率kss,使得车辆的横向加速度不变得等于或大于车辆的特征值。
7、在本公开中,车辆的特征值可以是基于(车辆轮胎之间的左/右宽度/(2*车辆中轴线到车辆底部的距离))的值。
8、在本公开中,在驾驶员转向模式下,控制单元可以将根据驾驶员转向的前轮角δf乘以前轮角和后轮角之间的比率kss,以计算后轮角δr,并基于前轮角δf和后轮角δr执行后轮转向控制。
9、在本公开中,在自动驾驶模式下,控制单元可以通过使用前轮角和后轮角之间的比率kss来计算车辆的旋转中心度δcg′,通过使用车辆的旋转中心角来计算旋转中心和后轮的中轴线之间的距离rr,基于旋转中心和后轮的中轴线之间的距离rr来计算前轮角δf和后轮角δr,并且基于前轮角δf和后轮角δr执行四轮转向控制。
10、本公开的另一个实施例提供了一种控制四轮独立转向系统的方法,该方法包括:由前/后轮角度比率计算单元计算前轮角和后轮角之间的比率kss,该比率kss允许车身滑移角收敛到“0”,并允许横摆角和横摆率跟随目标值;以及由控制单元基于前轮角和后轮角之间的比率kss执行四轮转向控制。
11、在本公开中,在计算前轮角和后轮角之间的比率kss时,前/后轮角度比率计算单元可以通过应用增益g而调节目标转向不足梯度kus,来控制和改变前轮角和后轮角之间的比率kss。
12、在本公开中,在计算前轮角和后轮角之间的比率kss时,前/后轮角度比率计算单元可以基于查找表lut来计算增益g,查找表中存储有对应于转向角速度和转向角加速度的增益g。
13、在本公开中,在计算前轮角和后轮角之间的比率kss时,前/后轮角度比率计算单元可以通过限制横摆率来限制前轮角和后轮角之间的比率kss,使得横向加速度不变得等于或大于车辆的特征值。
14、在本公开中,车辆的特征值可以是基于(车辆轮胎之间的左/右宽度/(2*从车辆中轴线到车辆底部的距离))的值。
15、在本公开中,在执行四轮转向控制时,在驾驶员转向模式下,控制单元可以将根据驾驶员转向的前轮角δf乘以前轮角和后轮角之间的比率kss,以计算后轮角δr,并基于前轮角δf和后轮角δr执行后轮转向控制。
16、在本公开中,在执行四轮转向控制时,在自动驾驶模式下,控制单元可以通过使用前轮角和后轮角之间的比率kss来计算车辆的旋转中心角δcg′,通过使用车辆的旋转中心角来计算旋转中心和后轮的中轴线之间的距离rr,基于旋转中心和后轮的中轴线之间的距离rr来计算前轮角δf和后轮角δr,并且基于前轮角δf和后轮角δr执行四轮转向控制。
17、根据本公开实施例的四轮独立转向系统及控制其的方法,在根据前轮的转向角,控制后轮的转向角的四轮独立转向控制时,可以通过在跟随目标横摆率的同时即时调节转弯半径,来允许驾驶员感受动态转向。
18、同时,本公开的效果不限于上述效果,并且根据以下描述,各种效果可以包括在对本领域技术人员显而易见的范围内。
技术特征:
1.一种四轮独立转向系统,包括:
2.根据权利要求1所述的四轮独立转向系统,其中,所述前/后轮角度比率计算单元通过应用增益g而调节目标转向不足梯度kus,来控制和改变所述前轮角和后轮角之间的比率kss。
3.根据权利要求2所述的四轮独立转向系统,其中,所述前/后轮角度比率计算单元基于查找表lut来计算所述增益g,所述查找表中存储有对应于转向角速度和转向角加速度的增益g。
4.根据权利要求1所述的四轮独立转向系统,其中,所述前/后轮角度比率计算单元通过限制横摆率来限制所述前轮角和后轮角之间的比率kss,使得横向加速度不变得等于或大于车辆的特征值。
5.根据权利要求4所述的四轮独立转向系统,其中,所述车辆的特征值是基于以下的值:所述车辆的轮胎之间的左/右宽度/2*所述车辆的中轴线到所述车辆的底部的距离。
6.根据权利要求1所述的四轮独立转向系统,其中,在驾驶员转向模式下,所述控制单元将根据驾驶员转向的前轮角δf乘以所述前轮角和后轮角之间的比率kss,以计算后轮角δr,并基于所述前轮角δf和所述后轮角δr执行后轮转向控制。
7.根据权利要求1所述的四轮独立转向系统,其中,在自动驾驶模式下,所述控制单元通过使用所述前轮角和后轮角之间的比率kss来计算车辆的旋转中心角δcg',通过使用所述车辆的旋转中心角来计算旋转中心和后轮中轴线之间的距离rr,基于所述旋转中心和所述后轮中轴线之间的距离rr来计算前轮角δf和后轮角δr,并基于所述前轮角δf和所述后轮角δr执行四轮转向控制。
8.一种控制四轮独立转向系统的方法,所述方法包括:
9.根据权利要求8所述的方法,其中,在计算所述前轮角和后轮角之间的比率kss时,所述前/后轮角度比率计算单元通过应用增益g而调节目标转向不足梯度kus,来控制和改变所述前轮角和后轮角之间的比率kss。
10.根据权利要求9所述的方法,其中,在计算所述前轮角和后轮角之间的比率kss时,所述前/后轮角度比率计算单元基于查找表lut来计算所述增益g,所述查找表中存储有对应于转向角速度和转向角加速度的增益g。
11.根据权利要求8所述的方法,其中,在计算所述前轮角和后轮角之间的比率kss时,所述前/后轮角度比率计算单元通过限制横摆率来限制所述前轮角和后轮角之间的比率kss,使得横向加速度不变得等于或大于车辆的特征值。
12.根据权利要求11所述的方法,其中,所述车辆的特征值是基于以下的值:所述车辆的轮胎之间的左/右宽度/2*所述车辆的中轴线到所述车辆的底部的距离。
13.根据权利要求8所述的方法,其中,在所述执行四轮转向控制中,在驾驶员转向模式下,所述控制单元将根据驾驶员转向的前轮角δf乘以所述前轮角和后轮角之间的比率kss,以计算后轮角δr,并基于所述前轮角δf和所述后轮角δr执行后轮转向控制。
14.根据权利要求8所述的方法,其中,在所述执行四轮转向控制中,在自动驾驶模式下,所述控制单元通过使用所述前轮角和后轮角之间的比率kss来计算车辆的旋转中心角δcg',通过使用所述车辆的旋转中心角来计算旋转中心和后轮中轴线之间的距离rr,基于所述旋转中心和所述后轮中轴线之间的距离rr来计算前轮角δf和后轮角δr,并基于所述前轮角δf和所述后轮角δr执行四轮转向控制。
技术总结
本发明公开了一种四轮独立转向系统及控制其的方法。根据本公开实施例的四轮独立转向系统包括:前/后轮角度比率计算单元,被配置为计算前轮角和后轮角之间的比率Kss,该比率Kss允许车身滑移角收敛到“0”,并允许横摆角和横摆率跟随目标值;以及控制单元,被配置为基于前轮角和后轮角之间的比率Kss执行四轮转向控制。本发明的四轮独立转向系统及控制其的方法能够在根据前轮的转向角,控制后轮的转向角的四轮独立转向控制时,通过在跟随目标横摆率的同时即时调节转弯半径,来允许驾驶员感受动态转向。
技术研发人员:金泰弘
受保护的技术使用者:现代摩比斯株式会社
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!