一种具有动态平衡能力的爬壁移动模组的制作方法
1.本发明涉及机器人领域,具体地说,是一种具有动态平衡能力的爬壁移动模组。
背景技术:
2.在核能、船舶、化工、风电等行业,广泛存在大型的钢铁壁面,这些钢铁壁面经过长期的风吹日晒、盐碱侵蚀、灰尘黏附,表面会出现污垢、锈蚀以及掉色。因此在除锈、清洗以及检修维护工作中,会使用爬壁机器人在钢铁表面进行除锈。
3.爬壁机器人其后部从动轮中心亦设有磁吸块,且移动轮组与本体之间的连接为刚性连接,使得当行进面如船舱壁存在凸起或凹陷,后侧轮组在越过这些障碍物时,会形成一个倾斜角,导致磁吸块所在的平面被抬高,使磁吸块与接触面如船体表面脱离接触,容易造成吸附力的降低或丧失,导致爬壁机器人掉落的危险发生。
4.综上所述,亟需一种能够在凹凸不平的仓壁上平稳行走,不影响磁吸效能的结构简单,性能稳定的具有动态平衡能力的爬壁移动模组。
技术实现要素:
5.本发明的目的是,提供一种能够在凹凸不平的仓壁上平稳行走,不影响磁吸效能的结构简单,性能稳定的具有动态平衡能力的爬壁移动模组。
6.为实现上述目的,本发明采取的技术方案是:
7.一种具有动态平衡能力的爬壁移动模组,包括安装组件、平衡组件、吸附组件;所述安装组件用于与外部设备连接固定,所述平衡组件用于平衡平衡越障,所述吸附组件用于提供吸附力;所述平衡组件与所述安装组件活动相连,所述平衡组件包括第一活动连接部、平衡连接件、移动部,所述第一活动连接部设于平衡连接件中心位置,所述移动部分别设于所述平衡连接件两端;所述吸附组件包括磁吸块、磁吸支架;所述磁吸支架一端与所述磁吸块固定相连,另一端与所述平衡连接件固定相连;所述安装组件其上设有与所述第一活动连接部相适配连接的第二活动连接部。
8.作为一种优选的技术方案,所述平衡连接件为板状结构,所述第一活动连接部为中空管状结构,对应的,所述第二活动连接部为中心设有凹槽的中空管状结构,所述第一活动连接部可设于所述凹槽内。
9.作为一种优选的技术方案,所述第一活动连接部其管道凸出于所述平衡连接件表面。
10.作为一种优选的技术方案,所述第一活动连接部还设有加强翼板,所述加强翼板安装于所述第一活动连接部其管体两侧,其下表面与所述平衡连接件固定相连,其上表面为斜面,所述斜面朝远离管体的方向向下倾斜。
11.作为一种优选的技术方案,所述磁吸块为弧形磁块,其内弧面与所述磁吸支架相连,所述磁吸支架其上表面与所述平衡连接件下表面固定相连。
12.作为一种优选的技术方案,所述磁吸块与所述磁吸支架可拆卸式相连。
13.本发明优点在于:
14.本发明所述具有动态平衡能力的爬壁移动模组包括安装组件、平衡组件、吸附组件,所述安装组件与所述平衡组件活动相连,所述平衡组件其下设有吸附组件,所述平衡组件可随着路径的高低起伏相对所述安装组件进行相应的旋转,避免其下连接的磁吸组件出现悬浮的情况,且所述平衡组件的设置能有效降低相应的应用设备的随着路径起伏的摇晃幅度,增加平稳性。
附图说明
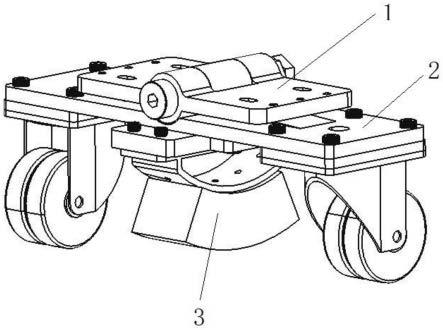
15.附图1是本发明一种具有动态平衡能力的爬壁移动模组立体示意图。
16.附图2是本发明一种具有动态平衡能力的爬壁移动模组部件示意图。
17.附图3是本发明一种具有动态平衡能力的爬壁移动模组与支架配合示意图。
18.附图4是本发明一种具有动态平衡能力的爬壁移动模组应用示意图。
具体实施方式
19.下面结合具体实施方式,进一步阐述本发明。应理解,这些实施例仅用于说明本发明而不用于限制本发明的范围。此外应理解,在阅读了本发明记载的内容之后,本领域技术人员可以对本发明作各种改动或修改,这些等价形式同样落于本技术所附权利要求书所限定的范围。
20.附图中涉及的附图标记和组成部分如下所示:
21.1.安装组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
2.平衡组件
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
3.吸附组件
22.4.轴杆
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
11.第二活动连接部
ꢀꢀꢀꢀꢀ
21.第一活动连接部
23.22.平衡连接件
ꢀꢀꢀꢀꢀꢀꢀꢀ
23.移动部
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
31.磁吸块
24.32.磁吸支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
211.加强翼板
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
231.移动轮.
25.5.支架
ꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀꢀ
6.爬壁机器人
26.实施例1
27.请参见附图1、附图2;附图1是本发明一种具有动态平衡能力的爬壁移动模组立体示意图;附图2是本发明一种具有动态平衡能力的爬壁移动模组部件示意图。一种具有动态平衡能力的爬壁移动模组,包括安装组件1、平衡组件2、吸附组件3;所述安装组件1为平板结构,其上设有若干连接孔,可以为通孔或螺纹孔,用于与外部设备进行螺栓紧固连接,所述安装组件1其中心设有第二活动连接部11,所述第二活动连接部11为两段式中空管状结构,将平板结构从中间分开;所述平衡组件2包括第一活动连接部21、平衡连接件22、移动部23;所述平衡连接件22同样为板状结构,其上亦设有若干用于连接的孔位,所述平衡连接件22其中间上方设有第一活动连接部21,所述第一活动连接部21为中空管状结构,其中所述第一活动连接部21安置于两段所述第二活动连接部11之间,在一些实施方式中,所述第一活动连接部21与所述第二活动连接部11的结构可以交换,同样能够实现相对转动的效果;所述第一活动连接部21与所述第二活动连接部11的管道相同,通过轴杆4活动连接,所述平衡连接件22可绕所述轴杆4转动,优选的,所述第一活动连接部21还设有加强翼板211,所述加强翼板211安装于所述第一活动连接部21其管体两侧,其下表面与所述平衡连接件22固定相连,其上表面为斜面,所述斜面朝远离管体的方向向下倾斜,既能加强平衡件的连接强
度,又能提供转动限位;所述平衡连接件22其两端下方设有移动部23,所述移动部23带有移动轮231;所述吸附组件3包括磁吸块31、磁吸支架32,所述磁吸支架32为弧形磁块,其内弧面与所述磁吸支架32相连,所述磁吸支架32其上表面与所述平衡连接件22下表面固定相连,优选的,所述磁吸块31与所述磁吸支架32可拆卸式相连,即所述磁吸块31与所述磁吸支架32上皆设有螺栓孔,用于螺栓连接。
28.本发明的使用方式:应理解的是,本发明所指的固定连接,可以是通过螺栓等紧固件连接,也可以为一体式成型工艺制成的一体件;本发明所述动态平衡能力的爬壁移动模组使用时,当移动轮231位于高低不在同一平面的位置时,所述平衡连接件22即会绕轴杆4旋转,所述磁吸块31则可以一直保持与壁面相接触的状态,所述安装组件1用于提供与外部设备的连接方式,如在爬壁机器人的应用中,所述具有动态平衡能力的爬壁移动模组提供后轮组支撑,在行进过程中,无需担心一端翘起的时候导致磁吸块31悬空的情况发生。
29.需要说明的是:所述具有动态平衡能力的爬壁移动模组包括安装组件1、平衡组件2、吸附组件3,所述安装组件1与所述平衡组件2活动相连,所述平衡组件2其下设有吸附组件3,所述平衡组件2可随着路径的高低起伏相对所述安装组件1进行相应的旋转,避免其下连接的吸附组件3出现悬浮的情况,且所述平衡组件2的设置能有效降低相应的应用设备的随着路径起伏的摇晃幅度,增加平稳性;所述第一活动连接部21其管道凸出于所述平衡连接件22表面,方便安装组件1与其进行活动连接,同时提供平衡组件2的活动角度;所述第一活动连接部21还设有加强翼板211,所述加强翼板211安装于所述第一活动连接部21其管体两侧,其下表面与所述平衡连接件22固定相连,其上表面为斜面,所述斜面朝远离管体的方向向下倾斜,使得安装组件1安装于上方时,提供活动角度,防止安装组件1与平衡组件2完全贴合导致无平衡组件2无法有效转动的情况发生;所述磁吸块31为弧形磁块,其内弧面与所述磁吸支架32相连,所述磁吸支架32其上表面与所述平衡连接件22下表面固定相连,所述磁吸支架32可以采用无磁性的铝制材料制成,方便磁吸块31的安装调整;所述磁吸支架32还可以通过设置不同的尺寸控制磁吸块31的安装高度。
30.实施例2
31.请参见附图3、附图4,附图3是本发明一种具有动态平衡能力的爬壁移动模组与支架配合示意图;附图4是本发明一种具有动态平衡能力的爬壁移动模组应用示意图。本实施例就具体的实施方式对本发明所述具有动态平衡能力的爬壁移动模组的应用进行进一步说明,所述安装组件1其板两侧通过螺栓固定有支架5,所述支架5的另一端与其他设备相连,如与带有驱动轮的主动驱动轮组相连,组成爬壁机器人6,应理解的是,其它设备均为现有技术。需要说明的是本发明所述具有动态平衡能力的爬壁移动模组作为从动轮应用于爬壁机器人6中,极大的提升了机器人的越障能力,保障了使用安全。
32.以上所述仅是本发明的优选实施方式,应当指出,对于本技术领域的普通技术人员,在不脱离本发明原理的前提下,还可以做出若干改进和补充,这些改进和补充也应视为本发明的保护范围。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1