一种适用于斜坡地面具有缓冲节能稳定功能的仿生机械腿
1.本发明属于工程仿生技术领域,涉及一种适用于斜坡地面具有缓冲节能稳定功能的仿生机械腿。
背景技术:
2.我国地形多为山地、丘陵和高原,其中山区面积约占全国总面积的2/3,具有丰富的矿产、林业和水能资源。近几十年来,随着人类的不断探索与开发,人们的活动范围不断地向山地丘陵环境扩展。因此,设计一款适用于斜坡地面的行走机构对山区的开发和保护具有重要意义。足式机器人在崎岖的复杂地形上运动时,对地面的适应能力较强,具有很好的机动性、能效性和稳定性。机械腿作为足式机器人的重要组成部件,能够直接影响足式机器人运动时的稳定性、行走速度和负载能力。
3.自然界的生物经过长时间的进化,具有更出色的运动能力和灵活性,能够在不同的地形上快速、稳定的运动。与同质量的机器人相比,动物具有更高的运动能效,这对仿生设计具有重要的研究意义。驯鹿是一种典型的多路面迁徙动物,善于在密林、山地、沼泽、冰雪地面中行走和奔跑。驯鹿的四肢相对较短,但蹄子较大,其掌面宽阔。尤其是主蹄和悬蹄,其足底周围生长有许多刚毛。在触地时,能够增大足底与地面的接触面积,减少蹄部因运动所受的冲击载荷,增大与地面的摩擦力。因此,驯鹿在坡地、山丘、崎岖不平的道路上具有节能稳定的行走和奔跑优势。
技术实现要素:
4.本发明的目的是为了提高足式机器人在斜坡上的缓冲、稳定和节能性能,以自然界动物的优越特征为灵感,利用工程仿生学原理,设计了一种仿生机械腿。
5.本发明包括仿生机械腿机构和仿生机械足机构;
6.所述的仿生机械腿机构由活动杆、套筒、避震机构、第一连接杆、第二连接杆、承重杆和弹性绳组成;
7.所述的仿生机械足机构由上固定支座、张合杆、第一扭簧、下固定支座、滑块、蹄壳、连接支座、足底板、足底垫、悬蹄、关节主轴和第二扭簧组成;活动杆控制机械腿整体的前后活动;第一连接杆、第二连接杆与承重杆组成机械腿的踝关节,与避震机构搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用;关节主轴对应驯鹿跖趾关节部分,第一扭簧模拟跖趾关节缓冲的作用;足底板为两个独立部件,安装在承重杆两侧,并且与关节主轴固连,足底板底面作为机械腿的主要触地点,模拟蹄球的曲面结构;悬蹄能绕关节主轴活动,为机械腿提供一定的支持力,提高稳定性;根据提取的驯鹿蹄壳曲线设计了机械腿蹄壳,机械腿蹄壳的蹄边缘和蹄尖处为纵向和锯齿状棱纹结构,提升了机械腿的附着性能。机械腿蹄壳底部安装足底垫,能够减缓地面冲击力;为了实现驯鹿蹄两趾张合的功能,上固定支座、下固定支座、张合杆和滑块组成伸肌腱系统,伸肌腱系统控制蹄壳的张合,以增加机械腿的稳定性;伸肌腱系统在触地期内具有缓冲和节能的作用,仿生机械
腿弹性绳模拟驯鹿蹄屈肌腱,仿生机械腿弹性绳上端与第一连接杆相连,仿生机械腿弹性绳末端分别连接两个足底板,通过控制足底板实现缓冲和节能的作用。
8.所述的足底垫的硬度为58ha。
9.本发明的有益效果:
10.连接杆与承重杆组成机械腿的踝关节,与两组避震搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用;由固定支座、张合杆和滑块组成的伸肌腱系统能控制蹄壳的张合,以增加机械腿的稳定性;本发明具有自适应张合机构、四级缓冲系统以及仿生肌腱结构,具有节能、缓冲和稳定的功能。
附图说明
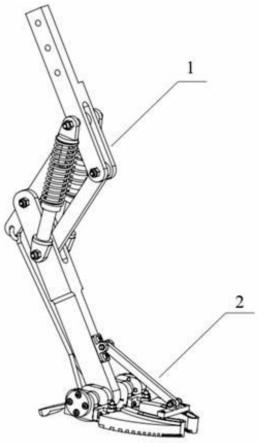
11.图1是本发明的结构立体图;
12.图2是本发明的主视图;
13.图3是本发明的俯视图;
14.图4是本发明的侧视图;
15.图5是本发明的仿生机械足结构图;
16.图6是本发明的足底垫结构图。
具体实施方式
17.如图1至图6所示,本发明包括仿生机械腿机构1和仿生机械足机构2;
18.所述的仿生机械腿机构1由活动杆3、套筒4、避震机构5、第一连接杆6、第二连接杆7、承重杆8和弹性绳9组成;
19.所述的仿生机械足机构2由上固定支座10、张合杆11、第一扭簧12、下固定支座13、滑块14、蹄壳15、连接支座16、足底板17、足底垫18、悬蹄19、关节主轴20和第二扭簧21组成;活动杆3控制机械腿整体的前后活动;第一连接杆6、第二连接杆7与承重杆8组成机械腿的踝关节,与避震机构5搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用;关节主轴20对应驯鹿跖趾关节部分,第一扭簧12模拟跖趾关节缓冲的作用;足底板17为两个独立部件,安装在承重杆8两侧,并且与关节主轴20固连,足底板17底面作为机械腿的主要触地点,模拟蹄球的曲面结构;悬蹄19能绕关节主轴20活动,为机械腿提供一定的支持力,提高稳定性;根据提取的驯鹿蹄壳曲线设计了机械腿蹄壳15,机械腿蹄壳15的蹄边缘和蹄尖处为纵向和锯齿状棱纹结构,提升了机械腿的附着性能。机械腿蹄壳15底部安装足底垫18,能够减缓地面冲击力;为了实现驯鹿蹄两趾张合的功能,上固定支座10、下固定支座13、张合杆11和滑块14组成伸肌腱系统,伸肌腱系统控制蹄壳15的张合,以增加机械腿的稳定性;伸肌腱系统在触地期内具有缓冲和节能的作用,仿生机械腿弹性绳9模拟驯鹿蹄屈肌腱,仿生机械腿弹性绳9上端与第一连接杆6相连,仿生机械腿弹性绳9末端分别连接两个足底板17,通过控制足底板17实现缓冲和节能的作用。
20.所述的足底垫18的硬度为58ha。
21.本发明的工作过程:
22.仿生机械腿在触地之前,两蹄壳为闭合状态,承重杆与蹄壳的夹角为165
°
,连接杆与承重杆的夹角为120
°
,分别模拟了跖趾关节和踝关节的角度。在触地时,蹄尖最先触地,
随着活动杆的转动,蹄壳、足底和悬蹄依次触地。在触地前期,跖趾关节逐渐屈曲,导致张合杆控制滑块沿着蹄壳的滑槽前移,两蹄壳逐渐张开。在触地后期,跖趾关节逐渐伸展,两蹄壳逐渐闭合,实现了蹄壳在触地过程中自动张合的自适应功能,有效提高了机械腿的稳定性。
23.在触地前期,蹄壳底部的足底垫作为第一级缓冲,率先与地面接触,减缓地面对机械腿的冲击力。随着跖趾关节的屈曲,第一扭簧被压缩从而吸收冲击力,此时第一扭簧作为第二级缓冲。此外,当跖趾关节屈曲时,弹性绳被向下拉伸。在触地中期,踝关节屈曲时弹性绳被向上拉伸,此时弹性绳作为第三级缓冲。当足底接触地面时,踝关节与膝关节开始屈曲,避震弹簧吸收冲击力被压缩,避震作为第四级缓冲。
技术特征:
1.一种适用于斜坡地面具有缓冲节能稳定功能的仿生机械腿,其特征在于:包括仿生机械腿机构(1)和仿生机械足机构(2);所述的仿生机械腿机构(1)由活动杆(3)、套筒(4)、避震机构(5)、第一连接杆(6)、第二连接杆(7)、承重杆(8)和弹性绳(9)组成;所述的仿生机械足机构(2)由上固定支座(10)、张合杆(11)、第一扭簧(12)、下固定支座(13)、滑块(14)、蹄壳(15)、连接支座(16)、足底板(17)、足底垫(18)、悬蹄(19)、关节主轴(20)和第二扭簧(21)组成;活动杆(3)控制机械腿整体的前后活动;第一连接杆(6)、第二连接杆(7)与承重杆(8)组成机械腿的踝关节,与避震机构(5)搭配模拟了驯鹿蹄踝关节的运动结构;关节主轴(20)为跖趾关节部分,第一扭簧(12)模拟跖趾关节缓冲的作用;足底板(17)为两个独立部件,安装在承重杆(8)两侧,并且与关节主轴(20)固连,足底板(17)底面作为机械腿的主要触地点,模拟蹄球的曲面结构;悬蹄(19)能绕关节主轴(20)活动;机械腿蹄壳(15)的蹄边缘和蹄尖处为纵向和锯齿状棱纹结构,机械腿蹄壳(15)底部安装足底垫(18),固定支座(10)、下固定支座(13)、张合杆(11)和滑块(14)组成伸肌腱系统,伸肌腱系统控制蹄壳(15)的张合,伸肌腱系统在触地期内具有缓冲和节能的作用,仿生机械腿弹性绳(9)上端与第一连接杆(6)相连,仿生机械腿弹性绳(9)末端分别连接两个足底板(17),通过控制足底板(17)实现缓冲和节能的作用。2.根据权利要求1所述的一种适用于斜坡地面具有缓冲节能稳定功能的仿生机械腿,其特征在于:所述的足底垫(18)的硬度为58ha。
技术总结
一种适用于斜坡地面具有缓冲节能稳定功能的仿生机械腿,包括仿生机械腿机构和仿生机械足机构,仿生机械腿机构由活动杆、套筒、避震机构、第一连接杆、第二连接杆、承重杆和弹性绳组成,仿生机械足机构由上固定支座、张合杆、第一扭簧、下固定支座、滑块、蹄壳、连接支座、足底板、悬蹄、关节主轴和第二扭簧组成,连接杆与承重杆组成了机械腿的踝关节,与两组避震搭配模拟了驯鹿蹄踝关节的运动结构特点,起到了减缓冲击和吸收能量的作用。为了实现驯鹿蹄两趾张合的功能,由固定支座、张合杆和滑块组成的伸肌腱系统能控制蹄壳的张合,增加了机械腿的稳定性。本发明具有自适应张合机构、四级缓冲系统以及仿生肌腱结构,具有节能、缓冲和稳定的功能。功能。功能。
技术研发人员:文立阁 张锐 赵亮亮 董文超 庞浩 邹猛 马嘉 罗小桃 张华 胡震宇
受保护的技术使用者:吉林大学
技术研发日:2022.09.21
技术公布日:2022/11/15
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1