转向行程控制装置、上转向装置、线控转向系统、车辆和转向控制方法与流程
本申请涉及车辆,尤其涉及一种转向行程控制装置、上转向装置、线控转向系统、车辆和转向控制方法。
背景技术:
1、现有技术中,车辆转向行程(即方向盘的最大转动角度)的限制通常是通过机械式限位机构来实现。例如,通过在齿条的两端分别设置一个限位块,以使齿轮仅能在这两个限位块之间移动,以此来限制方向盘的最大转动角度,即限制车辆的转向行程。然而,这种机械式限位机构一旦设置好,车辆转向行程即被固定,车辆转向行程无法调节,从而无法满足车辆在转向行程上的不同需求。
技术实现思路
1、本申请提供了一种转向行程控制装置、上转向装置、线控转向系统、车辆和转向控制方法,以解决现有技术中存在的车辆转向行程无法调节的问题。
2、根据本申请的第一方面,提供了一种转向行程控制装置,包括:
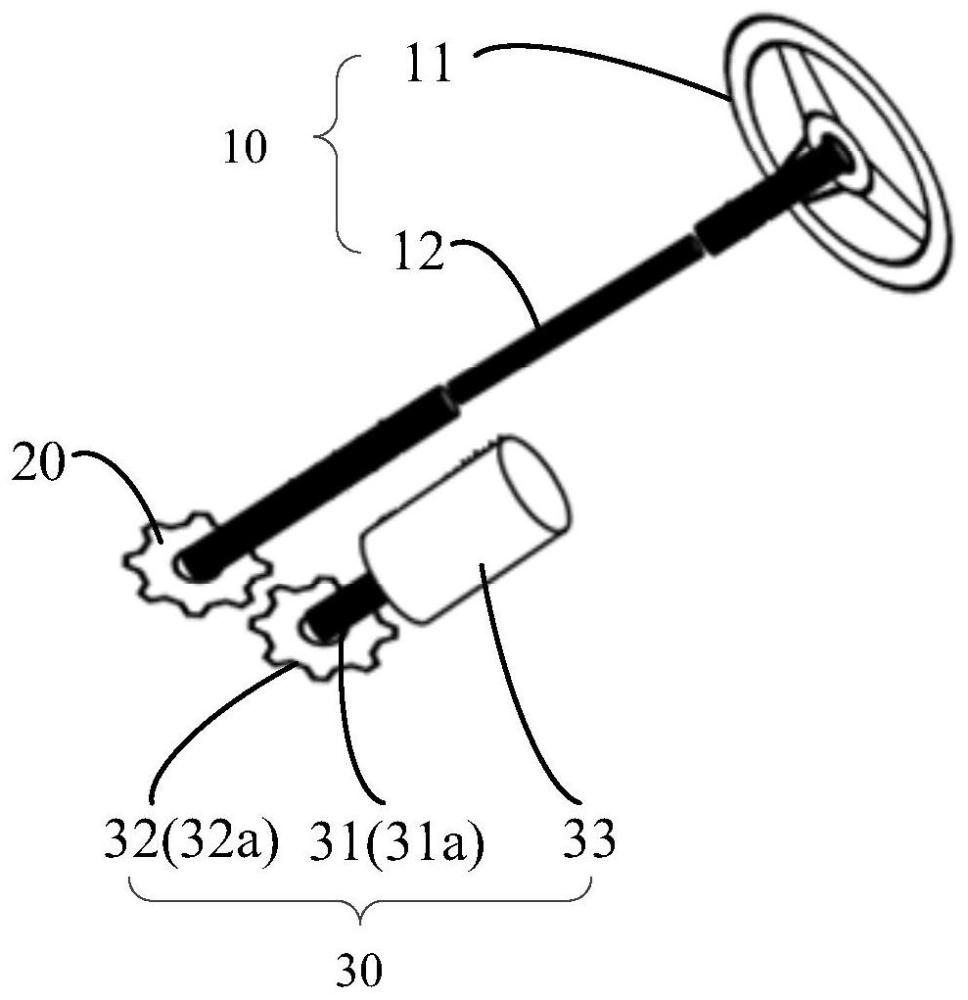
3、转向操纵机构,包括方向盘和转向管柱,所述转向管柱包括第一端和第二端,所述方向盘与所述转向管柱的第一端连接;
4、第一齿轮,所述第一齿轮与所述转向管柱的第二端连接;
5、行程控制机构,所述行程控制机构具有转动部,所述转动部通过齿轮结构与所述第一齿轮啮合;
6、其中,所述转动部的转动圈数小于预设值时,所述转动部处于可转动状态;
7、所述转动部的转动圈数达到所述预设值时,所述转动部处于不可转动状态。
8、根据本申请的第二方面,提供了一种上转向装置,包括第一方面所述的转向行程控制装置。
9、根据本申请的第三方面,提供了一种线控转向系统,包括第二方面所述的上转向装置。
10、根据本申请的第四方面,提供了一种车辆,包括第二方面所述的上转向装置,所述行程控制机构与所述车辆的电子控制单元ecu电连接,所述ecu用于在所述转动部的转动圈数达到预设值时,控制所述转动部处于不可转动状态。
11、根据本申请的第五方面,提供了一种转向控制方法,应用于第四方面所述的车辆,所述方法包括:
12、在检测到方向盘转动的情况下,采集所述转动部的转动圈数;
13、在所述转动部的转动圈数达到第一预设值时,控制所述转动部处于不可转动状态。
14、本申请实施例中,通过设置具有转动部的行程控制机构,使转动部通过齿轮结构与第一齿轮啮合,并在转动部的转动圈数小于预设值时,使转动部处于可转动状态,而在转动部的转动圈数达到预设值时,使转动部处于不可转动状态。当转动部处于可转动状态时,第一齿轮也处于可转动状态;而当转动部处于不可转动状态时,第一齿轮相应处于不可转动状态。可见,本申请实施例中,只需调节转动部的最大转动圈数,即可实现车辆转向行程的灵活调节。因此,本申请实施例的转向行程控制装置能够满足车辆在转向行程上的不同需求。
15、应当理解,本部分所描述的内容并非旨在标识本申请的实施例的关键或重要特征,也不用于限制本申请的范围。本申请的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种转向行程控制装置,其特征在于,包括:
2.根据权利要求1所述的转向行程控制装置,其特征在于,所述行程控制机构包括电机,所述电机的转轴为所述转动部,所述转轴通过所述齿轮结构与所述第一齿轮啮合;
3.根据权利要求2所述的转向行程控制装置,其特征在于,所述转轴设置有所述齿轮结构;或者,
4.根据权利要求3所述的转向行程控制装置,其特征在于,所述第二齿轮的直径小于所述第一齿轮的直径。
5.一种上转向装置,其特征在于,包括权利要求1至4中任一项所述的转向行程控制装置。
6.一种线控转向系统,其特征在于,包括权利要求5所述的上转向装置。
7.一种车辆,其特征在于,包括权利要求5所述的上转向装置,所述行程控制机构与所述车辆的电子控制单元ecu电连接,所述ecu用于在所述转动部的转动圈数达到预设值时,控制所述转动部处于不可转动状态。
8.根据权利要求7所述的车辆,其特征在于,在所述转动部的转动圈数小于所述预设值时,所述转动部随第一齿轮的转动而转动,或者,所述转动部的转动参数通过所述ecu控制。
9.根据权利要求8所述的车辆,其特征在于,所述ecu还用于以下至少一项:
10.一种转向控制方法,其特征在于,应用于权利要求7至9中任一项所述的车辆,所述方法包括:
11.根据权利要求10所述的方法,其特征在于,所述方法还包括:
12.根据权利要求10所述的方法,其特征在于,所述方法还包括:
技术总结
本申请提供了一种转向行程控制装置、上转向装置、线控转向系统、车辆和转向控制方法,其中,转向行程控制装置包括:转向操纵机构,包括方向盘和转向管柱,所述转向管柱包括第一端和第二端,所述方向盘与所述转向管柱的第一端连接;第一齿轮,所述第一齿轮与所述转向管柱的第二端连接;行程控制机构,所述行程控制机构具有转动部,所述转动部通过齿轮结构与所述第一齿轮啮合;其中,所述转动部的转动圈数小于预设值时,所述转动部处于可转动状态;所述转动部的转动圈数达到所述预设值时,所述转动部处于不可转动状态。本申请中,只需调节转动部的最大转动圈数,即可实现车辆转向行程的灵活调节。
技术研发人员:覃涛,黄博学
受保护的技术使用者:上海集度汽车有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!