一种设施农业用轮式智能运输车
1.本技术涉及农业设施领域,尤其是涉及一种设施农业用轮式智能运输车。
背景技术:
2.设施农业,是在环境相对可控条件下,采用工程技术手段,进行动植物高效生产的一种现代农业方式,设施农业涵盖设施种植、设施养殖和设施食用菌等,在设施农业中,经常需要利用运输车对所需要的种子、化肥、器具等物料进行运输,以提高工作效率。
3.现有的运输车在使用时,用于放置物料的运输板面积多为固定不可调的,不能够进行扩展,而当需要运输的物料较多时,一次无法运输完成,需要多次运输,而多次运输则降低了取料的运输效率。
技术实现要素:
4.本技术的目的在于:为解决上述背景技术中提出的问题,本技术提供了一种设施农业用轮式智能运输车。
5.本技术为了实现上述目的具体采用以下技术方案:
6.一种设施农业用轮式智能运输车,包括装置底板,所述装置底板的下端四角均固定有移动轮,所述装置底板的上端固定有三个呈一字阵列排布的分格板,所述装置底板的上端固定有护板,所述护板的上端固定有推把,所述装置底板侧面设置有伸展结构,所述装置底板上设置有夹持结构,所述装置底板上设置有控制器。在需要对物料进行运输时,将物料依次放置在装置底板上,并利用夹持结构对桶装物料进行夹持固定,当物料较多时,通过伸展结构能够对装置底板的面积进行扩展,进而能够放置更多的物料,更有利于物料的运输,当物料放置好后,使用者推动装置将物料运输到需要的位置。
7.进一步地,所述伸展结构包括滑动设置在装置底板侧面的延伸板,所述延伸板为两个且呈对称设置,所述装置底板内部开设有活动腔体,所述延伸板伸入活动腔体内部,所述装置底板上固定有驱动电机,所述控制器与驱动电机之间为电性连接,所述驱动电机的输出端伸入活动腔体内部,所述驱动电机与延伸板之间通过传动组件连接,所述装置底板与延伸板之间设置有清扫组件,所述延伸板的下端设置有支撑结构。
8.通过采用上述技术方案,在需要对较多物料进行运输时,开启驱动电机,在传动组件的作用下使得延伸板展开,从而扩大装置底板的承载面积,进而更有利于放置更多的物料。
9.进一步地,所述传动组件包括固定在驱动电机输出端的一号锥齿轮,所述活动腔体内部设置有双向螺纹杆,所述双向螺纹杆与装置底板之间为转动连接,所述双向螺纹杆上固定有二号锥齿轮,所述一号锥齿轮与二号锥齿轮相啮合,所述延伸板上固定有连接条,所述连接条与双向螺纹杆之间为螺纹连接。
10.通过采用上述技术方案,驱动电机工作时,在一号锥齿轮和二号锥齿轮的作用下,使得双向螺纹杆转动,并在连接条的作用下使得延伸板移动。
11.进一步地,所述清扫组件包括开设在装置底板侧面的两个对称设置的连接腔体,所述连接腔体内部设置有连接轴,所述连接轴与装置底板之间为转动连接,所述连接轴的一端伸出装置底板,所述连接轴伸出装置底板的一端固定有弧形块,所述弧形块上开设有弧形槽,所述装置底板上螺纹连接有固定螺栓,所述固定螺栓贯穿弧形槽,所述连接轴上固定有固定条,所述固定条端部固定有清扫板。
12.通过采用上述技术方案,当延伸板需要收纳时,转动弧形块,使清扫板与延伸板相抵触,然后再转动固定螺栓对弧形板进行固定,收纳过程中,清扫板能够对延伸板进行清扫。
13.进一步地,所述支撑结构包括开设在装置底板下端的挖槽,所述挖槽的槽底铰接有连杆,所述延伸板侧面螺纹连接有螺栓,螺栓伸入挖槽内部与连杆螺纹连接,所述连杆远离铰接点的一端转动连接有活动轮。
14.通过采用上述技术方案,在对延伸板伸展后,将连杆翻转出来,并用螺栓对连杆进行固定,使活动轮与地面相接触,从而提供支撑。
15.进一步地,所述挖槽的槽底固定有两个对称设置的卡接条,所述卡接条为弧形状。
16.通过采用上述技术方案,需要对连杆进行收纳时,对连杆进行转动,使连杆带动活动轮收纳至挖槽内部,利用卡接条能够对连杆进行限位。
17.进一步地,所述夹持结构包括固定在装置底板上端的放置板,所述放置板内置有压力传感器,所述装置底板上端固定有四个立板,所述立板两两对称设置,所述立板上固定有电动伸缩杆,所述电动伸缩杆的输出端固定有夹持板,所述控制器与电动伸缩杆之间为电性连接。
18.通过采用上述技术方案,在将物料桶放置在放置板上后,压力传感器受到压力并发出信号给控制,从而使控制器控制电动伸缩杆伸长,使夹持板对料桶进行夹持。
19.进一步地,所述夹持板的表面固定有若干个防滑条。
20.通过采用上述技术方案,在夹持物料桶时,防滑条能够增加夹持板与料筒之间的摩擦力,进而提高夹持稳固性。
21.综上所述,本技术包括以下至少一种有益效果;
22.1、本技术,在需要对装置底板进行扩展时,使用者通过控制器控制驱动电机,使其输出端正转,并配合传动组件使两个延伸板朝相反方向移动,实现装置底板的扩展,进而更有利于物料的放置,当需要收纳时,控制驱动电机,使其输出轴反转,进而使得延伸板向装置底板内部收纳,进而不会影响运输车的存放。
23.2、本技术,在将物料桶放置在放置板上后,放置板内置的压力传感器会发出信号给控制器,此时控制器发出信号给电动伸缩杆,使电动伸缩杆伸长,此时电动伸缩杆端部的夹持板与物料桶相抵触,从而对物料桶进行夹持,进而能够实现自动夹持,当需要将物料桶取下时,通过控制器控制电动伸缩杆收缩,进而不再对物料桶进行夹持。
附图说明
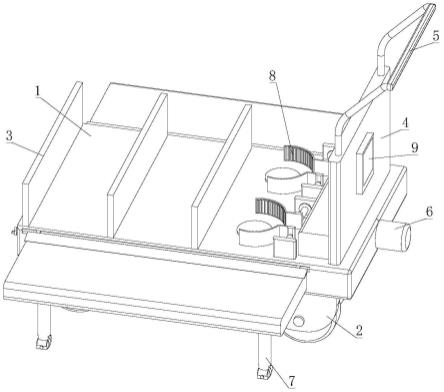
24.图1是本技术中运输车的第一立体结构示意图;
25.图2是本技术中装置底板的剖视图;
26.图3是本技术中运输车的第二立体结构示意图;
27.图4是本技术图3中a处放大示意图;
28.图5是本技术中运输车的第三立体结构示意图;
29.图6是本技术图5中b处放大示意图;
30.图7是本技术图3中c处放大示意图。
31.附图标记说明:
32.1、装置底板;2、移动轮;3、分格板;4、护板;5、推把;6、伸展结构;7、支撑结构;8、夹持结构;61、延伸板;62、驱动电机;63、活动腔体;64、传动组件;65、清扫组件;641、一号锥齿轮;642、双向螺纹杆;643、二号锥齿轮;644、连接条;651、连接腔体;652、连接轴;653、清扫板;654、弧形块;655、弧形槽;656、固定螺栓;657、固定条;71、挖槽;72、连杆;73、活动轮;74、卡接条;81、放置板;82、立板;83、电动伸缩杆;84、夹持板;85、防滑条。
具体实施方式
33.以下结合附图1-7对本技术作进一步详细说明。
34.本技术实施例公开一种设施农业用轮式智能运输车。
35.参照图1-7,一种设施农业用轮式智能运输车,包括装置底板1,装置底板1的下端四角均固定有移动轮2,装置底板1的上端固定有三个呈一字阵列排布的分格板3,装置底板1的上端固定有护板4,护板4的上端固定有推把5,装置底板1侧面设置有伸展结构6,装置底板1上设置有夹持结构8,装置底板1上设置有控制器9。在需要对物料进行运输时,将物料依次放置在装置底板1上,并利用夹持结构8对桶装物料进行夹持固定,当物料较多时,通过伸展结构6能够对装置底板1的面积进行扩展,进而能够放置更多的物料,更有利于物料的运输,当物料放置好后,使用者推动装置将物料运输到需要的位置。
36.参照图1-6,具体的为,伸展结构6包括滑动设置在装置底板1侧面的延伸板61,延伸板61为两个且呈对称设置,装置底板1内部开设有活动腔体63,延伸板61伸入活动腔体63内部,装置底板1上固定有驱动电机62,控制器9与驱动电机62之间为电性连接,驱动电机62的输出端伸入活动腔体63内部,驱动电机62与延伸板61之间通过传动组件64连接,装置底板1与延伸板61之间设置有清扫组件65,延伸板61的下端设置有支撑结构7。传动组件64包括固定在驱动电机62输出端的一号锥齿轮641,活动腔体63内部设置有双向螺纹杆642,双向螺纹杆642与装置底板1之间为转动连接,双向螺纹杆642上固定有二号锥齿轮643,一号锥齿轮641与二号锥齿轮643相啮合,延伸板61上固定有连接条644,连接条644与双向螺纹杆642之间为螺纹连接。在需要对装置底板1进行扩展时,使用者通过控制器9控制驱动电机62,使其输出端正转,驱动电机62工作时,会带动一号锥齿轮641转动,一号锥齿轮641转动会带动二号锥齿轮643使双向螺纹杆642转动,双向螺纹杆642转动时会使两个连接条644受力,同时连接条644到延伸板61的限制,从而使两个连接条644朝相反方向移动,此时两个延伸板61朝相反方向移动,实现装置底板1的扩展,进而更有利于物料的放置,当需要收纳时,控制驱动电机62,使其输出轴反转,进而使得延伸板61向装置底板1内部收纳。
37.参照图2、3,具体的为,清扫组件65包括开设在装置底板1侧面的两个对称设置的连接腔体651,连接腔体651内部设置有连接轴652,连接轴652与装置底板1之间为转动连接,连接轴652的一端伸出装置底板1,连接轴652伸出装置底板1的一端固定有弧形块654,弧形块654上开设有弧形槽655,装置底板1上螺纹连接有固定螺栓656,固定螺栓656贯穿弧
形槽655,连接轴652上固定有固定条657,固定条657端部固定有清扫板653。当延伸板61需要收纳时,先拧动固定螺栓656,使弧形块654能够进行转动,之后转动弧形块654,使其带动连接轴652,使清扫板653与延伸板61相抵触,然后再转动固定螺栓656对弧形板进行固定,之后对延伸板61进行收纳,收纳过程中,清扫板653能够将延伸板61上的灰尘、杂物、水渍清扫下来,更便于清扫板653的收纳。
38.参照图5、6,具体的为,支撑结构7包括开设在装置底板1下端的挖槽71,挖槽71的槽底铰接有连杆72,延伸板61侧面螺纹连接有螺栓,螺栓伸入挖槽71内部与连杆72螺纹连接,连杆72远离铰接点的一端转动连接有活动轮73。挖槽71的槽底固定有两个对称设置的卡接条74,卡接条74为弧形状。在对延伸板61伸展后,将连杆72翻转出来,之后再拧动螺栓对连杆72进行固定,此时活动轮73会与地面相接触,通过连杆72和活动轮73能够为延伸板61提供支撑力,当使用者在需要将延伸板61进行收纳时,松动螺栓,之后翻转连杆72围绕铰接点转动,使连杆72带动活动轮73收纳至挖槽71内部,且对卡接条74进行抵触,利用卡接条74对连杆72进行限位。
39.参照图3、7,具体的为,夹持结构8包括固定在装置底板1上端的放置板81,放置板81内置有压力传感器,装置底板1上端固定有四个立板82,立板82两两对称设置,立板82上固定有电动伸缩杆83,电动伸缩杆83的输出端固定有夹持板84,控制器9与电动伸缩杆83之间为电性连接。在将物料桶放置在放置板81上后,放置板81内置的压力传感器会发出信号给控制器9,此时控制器9发出信号给电动伸缩杆83,使电动伸缩杆83伸长,此时电动伸缩杆83端部的夹持板84与物料桶相抵触,从而对物料桶进行夹持,进而能够实现自动夹持,当需要将物料桶取下时,通过控制器9控制电动伸缩杆83收缩,进而不再对物料桶进行夹持。
40.参照图3、7,具体的为,夹持板84的表面固定有若干个防滑条85。在夹持物料桶时,通过防滑条85能够增加夹持板84与料筒之间的摩擦力,进而提高夹持效果。
41.工作原理:在需要对物料进行运输时,将物料依次放置在装置底板1上,当物料较多时,使用者通过控制器9控制驱动电机62,使其输出端正转,驱动电机62工作时,会带动一号锥齿轮641转动,一号锥齿轮641转动会带动二号锥齿轮643使双向螺纹杆642转动,双向螺纹杆642转动时会使两个连接条644受力,同时连接条644到延伸板61的限制,从而使两个连接条644朝相反方向移动,此时两个延伸板61朝相反方向移动,实现装置底板1的扩展,之后将物料放置在装置底板1和延伸板61上,当有桶装物料时,将物料桶放置在放置板81上后,放置板81内置的压力传感器会发出信号给控制器9,此时控制器9发出信号给电动伸缩杆83,使电动伸缩杆83伸长,此时电动伸缩杆83端部的夹持板84与物料桶相抵触,从而对物料桶进行夹持,进而能够实现自动夹持,当需要将物料桶取下时,通过控制器9控制电动伸缩杆83收缩,进而不再对物料桶进行夹持。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1