一种变形轮式移动机器人
本发明属于移动机器人领域,尤其涉及一种变形轮式移动机器人。
背景技术:
1、机器人产品是人类在20世纪的时候所能发明出来的最重要的设备,其在生产生活当中起着非常重要的作用。移动机器人的研究始于60年代末期的shakey移动机器人,自此以后,移动机器人得到了快速的发展。移动机器人按移动方式来分可以分为:轮式移动机器人、履带式移动机器人、腿足式移动机器人等,这些移动方式及机构各有优势,但其单一的移动方式却存在着共同的缺陷——即越障能力略低。在实际的工况下,比如大型商场、地铁、居民楼等区域,还是存在着比如台阶这样无法攀越的障碍[4]。这使得传统的移动机器人在面对此类复杂地形陷入很尴尬的情况。另外,尽管在我国7层及以上房屋都必须安装电梯,但那些未满足电梯安装条件的建筑物,其货物的运送仍然是一个很大的难题。所以,针对不同的作业需求,设计出适用于各种复杂道路环境的移动机器人。
2、在实现本发明的过程中,发明人发现现有技术至少存在以下问题:目前,可跨台阶、路肩等多种障碍的移动机器人的研究已成为当前的热点与难点。针对此问题,将传统移动机器人的移动机构结合起来,形成了轮腿式复合移动机构、轮履式复合移动机构、腿履式复合移动机构等,从某种意义上解决了越障问题。在这方面,我国在军事、太空探测和灾害救援方面投入了大量的资金,而在民用和生活领域的投入却很少。面对我国竞争日益激烈的机器人设备市场,我国的机械制造业在不断的蓬勃发展,国外众多企业对中国机器人行业市场同样非常看好,国外自主研发的各种自主品牌的机器人在国内迅速占领了市场。根据市场调研结果表明:目前国外机器人虽然具备性能可靠、作业效率高等一系列的优点,但价格相比较而言也比较昂贵;而国内相关品牌的机器人起步较晚,存在使用不便捷、技术含量低等缺点。
技术实现思路
1、本发明所要解决的技术问题是提供一种可以适用于不同地形行动,省时省力的变形轮式移动机器人。
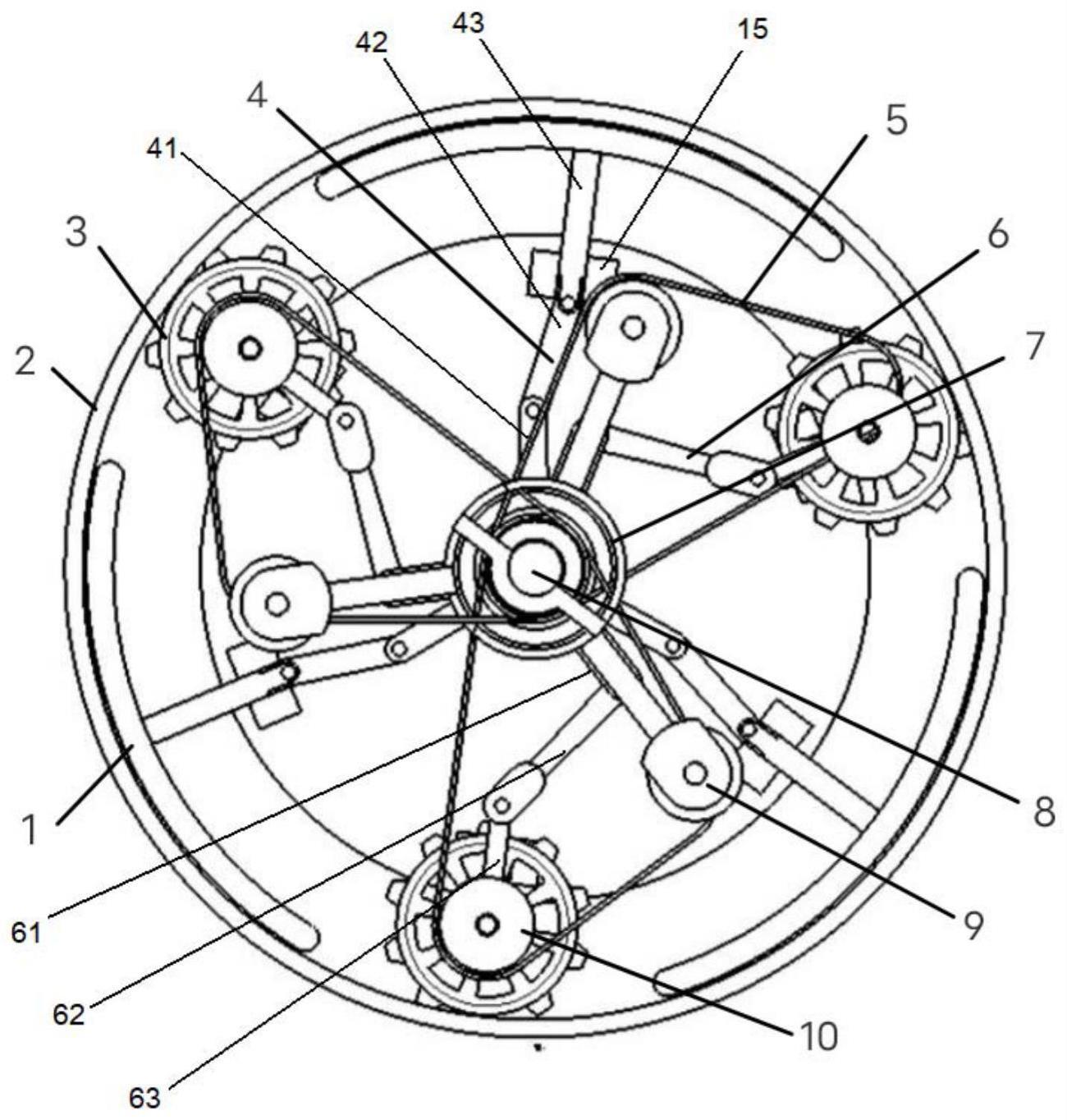
2、为了解决上述技术问题,本发明所采用的技术方案是:一种变形轮式移动机器人,具有变形轮,所述变形轮具有:
3、固定盘;
4、主传动轴,转动安装在所述固定盘上;
5、外传动轴,其为套筒形,所述外传动轴转动安装在所述主传动轴上;
6、第一连杆机构,其第一端与所述外传动轴连接;
7、支撑轮辋,与所述第一连杆机构的第二端连接;所述支撑轮辋能够在外传动轴和第一连杆机构的带动下伸缩;所述固定盘的外周设有至少三组支撑轮辋和第一连杆机构;
8、第二连杆机构,其第一端与所述外传动轴连接;
9、支撑齿轮,与所述第二连杆机构的第二端连接;所述支撑齿轮能够在外传动轴和第二连杆机构的带动下伸缩;所述固定盘的外周设有至少三组支撑齿轮和第二连杆机构;所述支撑齿轮设置在相邻的两个支撑轮辋之间;
10、履带套装在所述支撑轮辋和支撑齿轮上。
11、所述第一连杆机构具有依次连接的第一连接杆、第二连接杆和第三连接杆;所述第一连杆末端与外传动轴固定连接;所述第三连杆的末端与支撑轮辋固定连接。
12、所述第二连杆机构具有依次连接的第四连接杆、第五连接杆和第六连接杆;所述第四连杆末端与外传动轴固定连接;所述第六连杆的末端与支撑齿轮固定连接。
13、所述固定盘上设有夹板,所述第三连杆滑动安装在所述夹板内。
14、所述固定盘上设有限位槽,所述第六连杆滑动安装在所述夹板内。
15、还具有同步机构,所述同步机构包括第一带轮、第二带轮和同步带;所述第二带轮固定安装在主传动轴上,所述第二带轮固定安装在支撑齿轮上,所述同步带缠绕第一带轮和第二带轮。
16、还具有同步带张紧机构,所述同步带张紧机构包括伸缩气缸,所述伸缩气缸安装在外传动轴,伸缩气缸的活塞杆上设有滑轮,所述滑轮与同步带适配。
17、所述固定盘的外周均匀设有三组支撑轮辋和第一连杆机构;固定盘的外周均匀设有三组支撑齿轮和第二连杆机构;所述支撑轮辋和支撑齿轮交错设置。
18、所述外传动轴通过大轴承转动安装在主传动轴上。
19、还具有车厢,所述车厢的四周设有变形轮。
20、上述技术方案中的一个技术方案具有如下优点或有益效果,可以适用于不同地形行动,省时省力。
技术特征:
1.一种变形轮式移动机器人,其特征在于,具有变形轮,所述变形轮具有:
2.如权利要求1所述的变形轮式移动机器人,其特征在于,所述第一连杆机构具有依次连接的第一连接杆、第二连接杆和第三连接杆;所述第一连杆末端与外传动轴固定连接;所述第三连杆的末端与支撑轮辋固定连接。
3.如权利要求2所述的变形轮式移动机器人,其特征在于,所述第二连杆机构具有依次连接的第四连接杆、第五连接杆和第六连接杆;所述第四连杆末端与外传动轴固定连接;所述第六连杆的末端与支撑齿轮固定连接。
4.如权利要求3所述的变形轮式移动机器人,其特征在于,所述固定盘上设有夹板,所述第三连杆滑动安装在所述夹板内。
5.如权利要求4所述的变形轮式移动机器人,其特征在于,所述固定盘上设有限位槽,所述第六连杆滑动安装在所述夹板内。
6.如权利要求5所述的变形轮式移动机器人,其特征在于,还具有同步机构,所述同步机构包括第一带轮、第二带轮和同步带;所述第二带轮固定安装在主传动轴上,所述第二带轮固定安装在支撑齿轮上,所述同步带缠绕第一带轮和第二带轮。
7.如权利要求6所述的变形轮式移动机器人,其特征在于,还具有同步带张紧机构,所述同步带张紧机构包括伸缩气缸,所述伸缩气缸安装在外传动轴,伸缩气缸的活塞杆上设有滑轮,所述滑轮与同步带适配。
8.如权利要求7所述的变形轮式移动机器人,其特征在于,所述固定盘的外周均匀设有三组支撑轮辋和第一连杆机构;固定盘的外周均匀设有三组支撑齿轮和第二连杆机构;所述支撑轮辋和支撑齿轮交错设置。
9.如权利要求8所述的变形轮式移动机器人,其特征在于,所述外传动轴通过大轴承转动安装在主传动轴上。
10.如权利要求9所述的变形轮式移动机器人,其特征在于,还具有车厢,所述车厢的四周设有变形轮。
技术总结
本发明公开了一种变形轮式移动机器人,具有变形轮,变形轮具有:固定盘;主传动轴,转动安装在固定盘上;外传动轴,其为套筒形,外传动轴转动安装在主传动轴上;第一连杆机构,其第一端与外传动轴连接;支撑轮辋,与第一连杆机构的第二端连接;支撑轮辋能够在外传动轴和第一连杆机构的带动下伸缩;固定盘的外周设有至少三组支撑轮辋和第一连杆机构;第二连杆机构,其第一端与外传动轴连接;支撑齿轮,与第二连杆机构的第二端连接;支撑齿轮能够在外传动轴和第二连杆机构的带动下伸缩;履带套装在支撑轮辋和支撑齿轮上,可以适用于不同地形行动,省时省力。
技术研发人员:彭闪闪,李超超,史恩华,周宇虹,孙鹏
受保护的技术使用者:安徽信息工程学院
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!