连接组件、驱动机构、机械腿及机器人的制作方法
本申请涉及电机的,具体是涉及一种连接组件、驱动机构、机械腿及机器人。
背景技术:
1、目前,多数机器狗的电机装配一般是,将电机置于固定结构的一侧,从固定结构的另一相对侧装入穿设于固定结构和电机的螺栓,以将电机锁紧在固定结构上。然而,当固定结构的另一相对侧安装有其他结构件时,螺栓就会被其他结构件遮挡,导致拆卸电机时需要前置将其他结构件从固定结构上拆除,才能够完成电机的拆卸,降低了电机拆卸的便利性。
技术实现思路
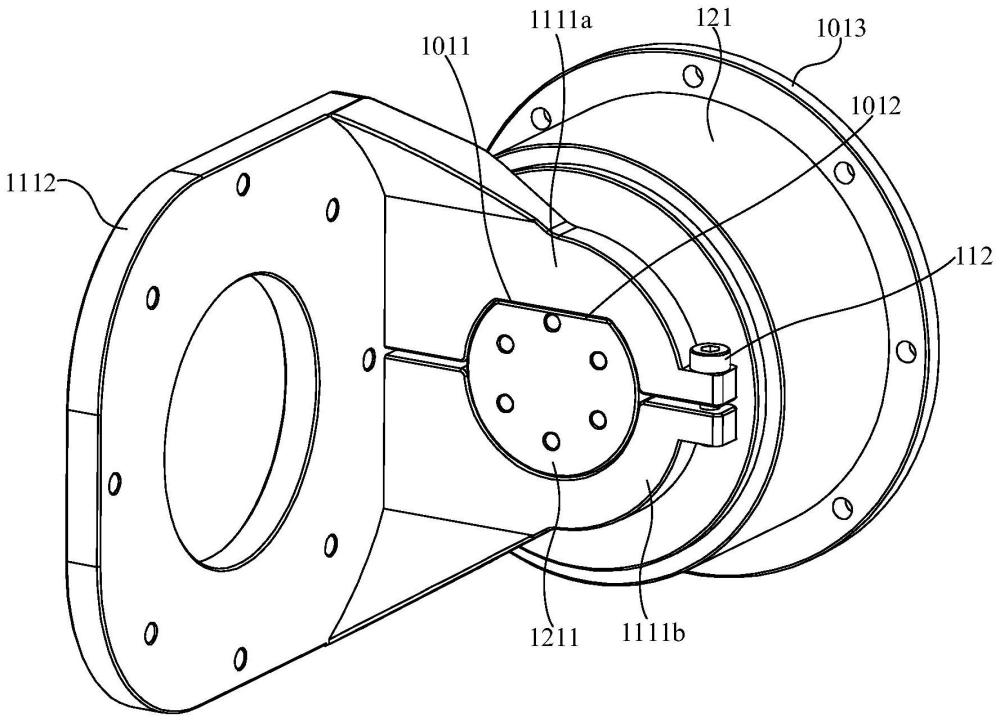
1、本申请实施例一方面提供了一种连接组件,用于安装第一驱动件,所述连接组件包括:安装支架和第一锁定件;所述安装支架与所述第一驱动件相对设置,且所述第一驱动件的连接端沿第一方向插设于所述安装支架上;所述第一锁定件沿第二方向穿设于所述安装支架上,并被配置为将所述连接端固定在所述安装支架上;其中,所述第一方向和所述第二方向相垂直。
2、本申请实施例另一方面还提供了一种驱动机构,所述驱动机构包括:驱动组件及连接组件,且所述驱动组件包括:第一驱动件;所述连接组件包括:安装支架和第一锁定件;所述安装支架与所述第一驱动件相对设置,且所述第一驱动件的连接端沿第一方向插设于所述安装支架上;所述第一锁定件沿第二方向穿设于所述安装支架上,并被配置为将所述连接端固定在所述安装支架上;其中,所述第一方向和所述第二方向相垂直。
3、本申请实施例另一方面还提供了一种机械腿,所述机械腿包括:腿部机构和上述的驱动机构;其中,所述腿部机构与所述驱动机构连接,并可在所述驱动机构的驱动下运动。
4、本申请实施例另一方面还提供了一种机器人,所述机器人包括:上述的机械腿及与所述机械腿连接的躯干。
5、本申请实施例提供的连接组件,通过设置驱动组件的连接端沿第一方向插设于安装支架上,以及第一锁定件沿垂直于第一方向的第二方向穿设于安装支架上,并将连接端固定于安装支架上,使得后续拆卸驱动组件时,仅需从第二方向上将第一锁定件拆除,即可完成驱动组件的拆卸。如此设置,相较于第一锁定件沿第一方向穿设于安装支架和连接端上,以安装支架和连接端相锁紧的方案,可以避免因安装支架背离驱动组件一侧设有其他结构件,而导致第一锁定件被遮挡无法拆除的问题,有利于提高驱动组件的拆卸便利性。
技术特征:
1.一种连接组件,用于安装第一驱动件,其特征在于,所述连接组件包括:安装支架和第一锁定件;
2.根据权利要求1所述的连接组件,其特征在于,所述安装支架包括:具有避让槽的第一固定板;其中,
3.根据权利要求2所述的连接组件,其特征在于,所述第一固定板包括:在所述第二方向上相对且间隔设置的第一限位部和第二限位部,且所述第一限位部和所述第二限位部之间形成有所述避让槽;所述第一锁定件沿所述第二方向穿设于所述第一限位部和所述第二限位部;其中,
4.根据权利要求3所述的连接组件,其特征在于,所述第一限位部和所述第二限位部之间具有空隙,且所述第一限位部朝向所述第二限位部的一侧设有第一凹槽,所述第二限位部朝向所述第一限位部的一侧设有第二凹槽;其中,所述第一凹槽、所述第二凹槽以及部分所述空隙共同形成所述避让槽。
5.根据权利要求3所述的连接组件,其特征在于,所述第一限位部设有第一螺孔,所述第二限位部设有第二螺孔,且所述第一螺孔和所述第二螺孔在所述第二方向上相对设置;其中,
6.根据权利要求2所述的连接组件,其特征在于,所述第一锁定件穿设于所述避让槽内,并与所述连接端在所述第二方向上相抵紧,以将所述连接端固定于所述避让槽内。
7.根据权利要求2所述的连接组件,其特征在于,所述连接端设有定位孔;所述第一锁定件穿设于所述避让槽内,并插设于所述定位孔内,以将所述连接端固定于所述避让槽内。
8.根据权利要求2所述的连接组件,其特征在于,所述避让槽的的槽壁上设有第一扁位,所述连接端设有第二扁位,且所述第一扁位和所述第二扁位相对设置;其中,
9.根据权利要求3所述的连接组件,其特征在于,所述连接组件还包括:第二锁定件;
10.根据权利要求3所述的连接组件,其特征在于,所述连接组件还包括:第二锁定件;所述连接端设有定位孔;其中,
11.根据权利要求2所述的连接组件,其特征在于,所述安装支架还包括:与所述第一固定板垂直连接的第二固定板,且所述第二固定板位于所述第一固定板背离所述第一驱动件的一侧。
12.一种驱动机构,其特征在于,所述驱动机构包括:驱动组件及连接组件,且所述驱动组件包括:第一驱动件;所述连接组件包括:安装支架和第一锁定件;
13.根据权利要求12所述的驱动机构,其特征在于,所述驱动组件还包括:第二驱动件;所述安装支架包括:具有避让槽的第一固定板;
14.根据权利要求13所述的驱动机构,其特征在于,所述安装支架还包括:与所述第一固定板垂直连接,且位于所述第一固定板背离所述第一驱动件一侧的第二固定板;其中,所述第二驱动件与所述第二固定板相对设置,并与所述第二固定板连接。
15.根据权利要求14所述的驱动机构,其特征在于,所述驱动组件还包括:连接件及第三驱动件;
16.根据权利要求15所述的驱动机构,其特征在于,所述第一驱动件、第二驱动件以及第三驱动件的周侧上均设有法兰边;其中,
17.一种机械腿,其特征在于,所述机械腿包括:腿部机构和权利要求12-16任意一项所述的驱动机构;其中,
18.一种机器人,其特征在于,所述机器人包括:权利要求17所述的机械腿及与所述机械腿连接的躯干。
技术总结
本申请提供了一种连接组件、驱动机构、机械腿及机器人,连接组件用于安装第一驱动件,且连接组件包括:安装支架和第一锁定件;安装支架与第一驱动件相对设置,且第一驱动件的连接端沿第一方向插设于安装支架上;第一锁定件沿第二方向穿设于安装支架上,并被配置为将连接端固定在安装支架上;其中,第一方向和第二方向相垂直。通过上述设置,当安装支架背离第一驱动件一侧装配有其他结构件时,第一锁定件不会被其他结构件遮挡,在拆卸第一驱动件的过程中仅需从而第二方向上将第一锁定件拆除即可,而无需前置拆卸其他结构件,有利于提高第一驱动件的拆卸便利性。
技术研发人员:王伟祥,高一夫
受保护的技术使用者:OPPO广东移动通信有限公司
技术研发日:
技术公布日:2024/6/11
- 还没有人留言评论。精彩留言会获得点赞!