铁路巡检的四足机器狗的制作方法
本发明涉及机器狗,具体而言,涉及铁路巡检的四足机器狗。
背景技术:
1、机器人通过编程和自动控制来执行诸如作业或移动等任务,能够半自主或全自主工作,其工作特性可以辅助甚至替代人类完成危险、繁重和复杂的工作,提高工作效率与质量,服务于人类生活并扩大或延伸人的活动及能力范围,四足机器狗作为机器人的一种,其拥有优越的地形适应能力,在复杂狭小的地形(如室内、街道、石路等)下,四足机器狗运动更加灵活且不受周围阻碍物的影响,四足机器人属于关节型机器人,这种构形动作灵活,工作空间大,在作业空间内手臂的干涉最小,结构紧凑,占地面积小。
2、现有公开号为cn109927808a的一种协同履带式的四足机器狗采用较为简单的机械结构,实现四足机器狗能够便于控制,灵活运动,适应较为复杂的地形环境,而在较为平坦的地形时,四肢可以自行折叠翻转,由履带小车负载躯体运动,节省能源。
3、但在铁路巡检时实施上述申请的过程中,发现存在至少如下缺陷:
4、第一,协同履带式的四足机器狗在铁路巡检中使用时,使四肢折叠翻转后,安装在躯干主体底部的履带小车易受折叠四肢的干涉,无法与地面完全接触;
5、第二,协同履带式的四足机器狗的履带小车在铁路站台等平坦光滑的地面上运动时,不利于提速巡检,巡检效率较低。
技术实现思路
1、本发明的目的在于提供铁路巡检的四足机器狗,通过利用驱动电机和齿轮箱利用传动轴输出动力,并使第一棱柱带动与驱动轴杆固定的第二棱柱转动,从而带动行走轮在限位套环的外部转动,可以代替取代大腿臂和小腿臂工作,解决了现有协同履带式的四足机器狗在铁路巡检中使用时,履带小车易受折叠四肢的干涉,无法与地面完全接触以及在铁路站台等平坦光滑的地面上运动时,不利于提速巡检,效率较低的问题。
2、为了实现上述发明目的,本发明提供了以下技术方案:
3、具有高防护的矿山用机械加工设备,以改善上述问题。
4、本申请具体是这样的:
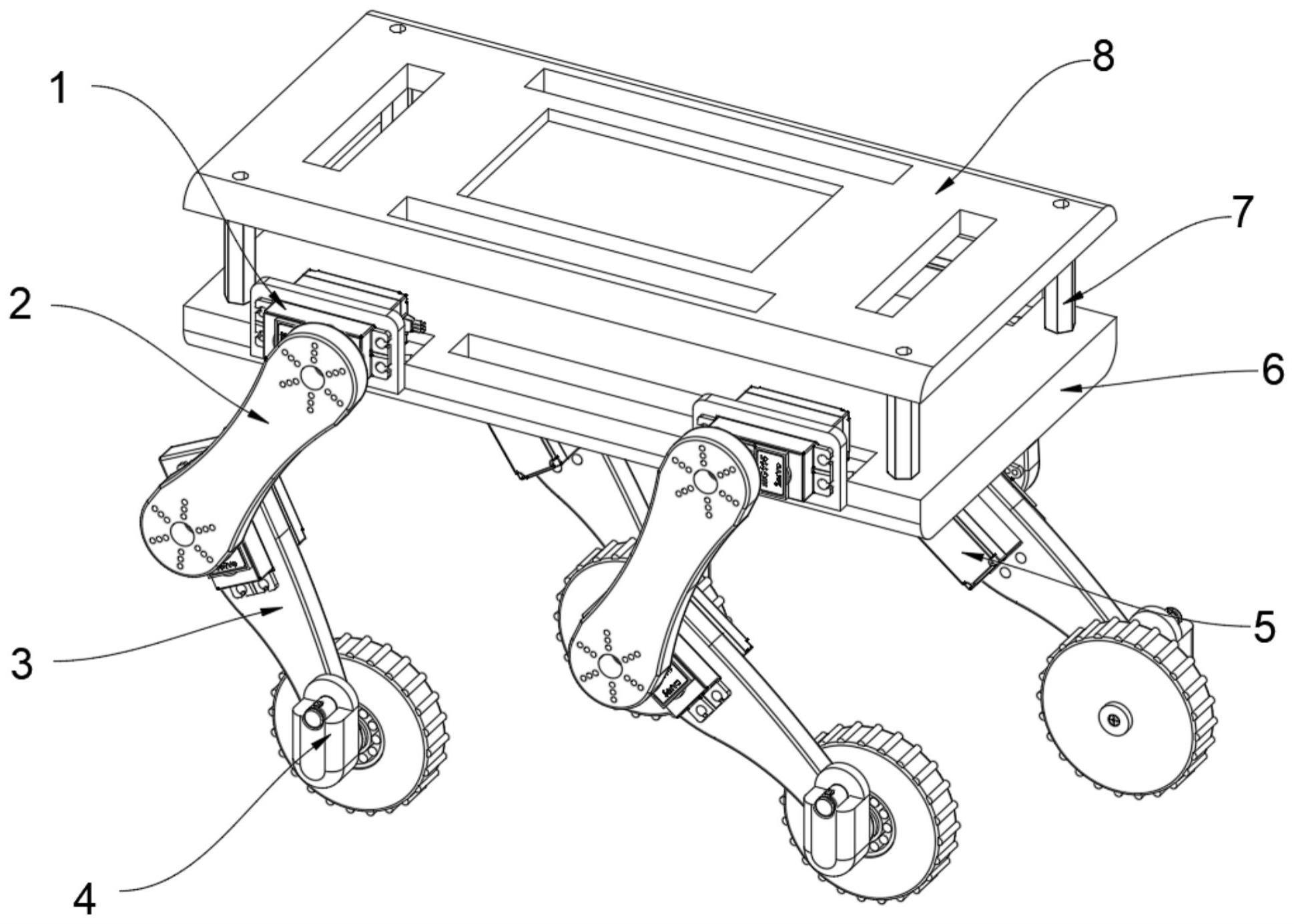
5、包括第一底座,所述第一底座两端的两侧均固定式连接有大腿舵机,所述大腿舵机的一侧传动式连接有大腿臂,所述大腿臂一端的一侧传动式连接有小腿舵机,所述小腿舵机的外部固定式连接有小腿臂;
6、滚动机构,其装配式连接在小腿臂一侧的外部,所述滚动机构包括齿轮箱,所述齿轮箱一侧的内部设置有驱动电机,所述齿轮箱另一侧的内部设置有传动轴,所述传动轴的一端设置有驱动轴杆,所述驱动轴杆的一端固定式连接有第二棱柱,所述驱动轴杆的外部设置有行走轮。
7、作为本申请优选的技术方案,所述第一底座四个拐角的顶部均设置有支撑套管,四个所述支撑套管的顶部设置有第二底座,所述支撑套管的内部设置有连接螺栓,所述第二底座与第一底座之间设置有处理器。
8、作为本申请优选的技术方案,所述传动轴的一端固定式连接有第一棱柱,所述第一棱柱插接式连接在驱动轴杆一端的内部,所述第一棱柱与驱动轴杆传动式连接。
9、作为本申请优选的技术方案,所述行走轮一侧的内部开设有第一插槽,所述第二棱柱插接式连接在第一插槽的内部。
10、作为本申请优选的技术方案,所述行走轮一侧的内部开设有第一柱形槽,所述第一柱形槽与第一插槽相连通,所述第一柱形槽的内部过盈配合有轴承。
11、作为本申请优选的技术方案,所述轴承的内部过盈配合有限位套环,所述限位套环的一端与小腿臂一端的表面固定式连接,所述驱动轴杆转动式连接在限位套环的内部。
12、作为本申请优选的技术方案,所述第一棱柱一侧的内部螺纹式连接有轴心螺杆,所述轴心螺杆活动式连接有驱动轴杆,所述轴心螺杆一端的外部设置有限位盖盘。
13、作为本申请优选的技术方案,所述限位盖盘一侧的内部开设有第二插槽,所述第二棱柱的一端插接式连接在第二插槽的内部,所述第二棱柱与限位盖盘传动式连接。
14、作为本申请优选的技术方案,所述限位盖盘一侧的内部开设有第二柱形槽,所述轴心螺杆的一端活动式连接在第二柱形槽的内部。
15、作为本申请优选的技术方案,所述大腿臂中部的表面装配式连接有对射传感器,所述对射传感器呈v字型且其内角为直角。
16、与现有技术相比,本发明的有益效果:
17、在本申请的方案中:
18、1.通过在四个不同大腿臂上均固定对射传感器,当四个对射传感器处于同一平面内,组成长方形完成信号传递工作后,可以向处理器输出信号利用处理器暂停大腿舵机和小腿舵机工作后同步启动驱动电机,可以保证四个行走轮的外壁同时与地面接触,保证本申请在光滑平坦铁路地面巡检时的移动速度;
19、2.通过利用驱动电机和齿轮箱利用传动轴输出动力,并使第一棱柱带动与驱动轴杆固定的第二棱柱转动,从而带动行走轮在限位套环的外部转动,可以代替取代大腿臂和小腿臂工作,提高本申请在光滑平坦铁路地面巡检时的移动速度,且不会影响小腿臂通过行走轮在复杂铁路路况中进行巡检工作;
20、3.通过在限位套环的外部过盈配合轴承,当驱动轴杆在小腿臂的内部转动时,同时在限位套环的内部转动,有利于增加驱动轴杆与小腿臂的接触面积,并由限位套环支撑行走轮转动,有利于提高滚动机构工作过程中的抗冲击能力,保证行走轮在地面上滚动顺畅。
技术特征:
1.铁路巡检的四足机器狗,其特征在于,包括
2.根据权利要求1所述的铁路巡检的四足机器狗,其特征在于,所述第一底座(6)四个拐角的顶部均设置有支撑套管(7),四个所述支撑套管(7)的顶部设置有第二底座(8),所述支撑套管(7)的内部设置有连接螺栓,所述第二底座(8)与第一底座(6)之间设置有处理器。
3.根据权利要求1所述的铁路巡检的四足机器狗,其特征在于,所述传动轴(410)的一端固定式连接有第一棱柱(407),所述第一棱柱(407)插接式连接在驱动轴杆(406)一端的内部,所述第一棱柱(407)与驱动轴杆(406)传动式连接。
4.根据权利要求1所述的铁路巡检的四足机器狗,其特征在于,所述行走轮(401)一侧的内部开设有第一插槽(412),所述第二棱柱(408)插接式连接在第一插槽(412)的内部。
5.根据权利要求4所述的铁路巡检的四足机器狗,其特征在于,所述行走轮(401)一侧的内部开设有第一柱形槽(411),所述第一柱形槽(411)与第一插槽(412)相连通,所述第一柱形槽(411)的内部过盈配合有轴承(405)。
6.根据权利要求5所述的铁路巡检的四足机器狗,其特征在于,所述轴承(405)的内部过盈配合有限位套环(10),所述限位套环(10)的一端与小腿臂(3)一端的表面固定式连接,所述驱动轴杆(406)转动式连接在限位套环(10)的内部。
7.根据权利要求3所述的铁路巡检的四足机器狗,其特征在于,所述第一棱柱(407)一侧的内部螺纹式连接有轴心螺杆(402),所述轴心螺杆(402)活动式连接有驱动轴杆(406),所述轴心螺杆(402)一端的外部设置有限位盖盘(409)。
8.根据权利要求7所述的铁路巡检的四足机器狗,其特征在于,所述限位盖盘(409)一侧的内部开设有第二插槽(413),所述第二棱柱(408)的一端插接式连接在第二插槽(413)的内部,所述第二棱柱(408)与限位盖盘(409)传动式连接。
9.根据权利要求8所述的铁路巡检的四足机器狗,其特征在于,所述限位盖盘(409)一侧的内部开设有第二柱形槽(414),所述轴心螺杆(402)的一端活动式连接在第二柱形槽(414)的内部。
10.根据权利要求1所述的铁路巡检的四足机器狗,其特征在于,所述大腿臂(2)中部的表面装配式连接有对射传感器(9),所述对射传感器(9)呈v字型且其内角为直角。
技术总结
本申请提供了铁路巡检的四足机器狗,涉及机器狗技术领域,包括第一底座和滚动机构,第一底座两端的两侧均固定有大腿舵机,大腿舵机的一侧传动式连接有大腿臂,大腿臂一端的一侧传动式连接有小腿舵机,小腿舵机的外部固定有小腿臂,滚动机构包括齿轮箱,齿轮箱一侧的内部设置有驱动电机,齿轮箱另一侧的内部设置有传动轴,传动轴的一端设置有驱动轴杆,驱动轴杆的一端固定式连接有第二棱柱,驱动轴杆的外部设置有行走轮。本申请通过利用驱动电机和齿轮箱利用传动轴输出动力,并使第一棱柱带动与驱动轴杆固定的第二棱柱转动,从而带动行走轮在限位套环的外部转动,可以代替取代大腿臂和小腿臂工作,提高其在光滑平坦铁路地面巡检时的移动速度。
技术研发人员:牟宏磊,蒙洋,刘晶晶,王烁石,张勇,范恒羽
受保护的技术使用者:中关村机器人产业创新发展有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!