一种桶仓储搬运磁导航AGV的制作方法
本发明涉及智能化的仓储设备领域,特别涉及一种桶仓储搬运磁导航agv。
背景技术:
1、目前,国内半导体行业,化工塑胶桶化学品储存、运输,仍采用人工加辅助设备搬运,人工加辅助设备运输的效率较低且成本高,由于酸性化学品的制造材料为pe塑料,搬用过程中,辅助设备无法稳定夹取,实时状态反馈,一旦发生事故事故容易威胁到搬运人员人生安全,运输过程属于人工半自动,无法实现工厂的智能化管理。
2、agv是装备有电磁或光电或其他等传感感应的自动导引装置,能够沿规定的导引路径自动行驶,是一种能够自动转向行走的能实现各种移载功能的搬运机器人。agv具有自动化程度高、安全、灵活等特点,因而广泛应用于各种自动化生产和仓储系统,它是柔性制造生产线和自动化立体仓库等现代化物流仓储系统的关键设备之一。目前,国内智能化仓储运输采用的avg无人车,由于使用舵轮驱动,在现有技术中舵轮结构中的电机多数是放置在舵轮侧边的,使得整个舵轮回转所需的空间变大,导致整个轮体结构累赘,占用空间体积大,普遍存在导向不精准,负载小,动力机构和转向机构复杂,导致体积过大,不能使用空间有限的应用场景。
3、现有的料桶夹具的夹紧方式一般采用手摇夹紧夹具或者鹰嘴夹具,由于酸性化学品的制造材料为pe塑料,搬用过程中,手摇夹紧夹具或者鹰嘴夹具容易对桶体边缘损伤,无法重复利用,且无法稳定夹取,容易出现虚夹状态,一旦发生事故事故会造成财产损失,威胁到搬运人员人生安全。
技术实现思路
1、为了解决上述问题,本发明提供一种桶仓储搬运磁导航agv,实现化工桶精确夹取、高效搬运,安全搬运,智能化管理。
2、本发明采用的技术方案如下:一种桶仓储搬运磁导航agv,关键在于:包括底盘,所述底盘上安装有行走轮组件、导航控制系统及桶夹具,所述桶夹具通过升降组件与所述底盘固定连接。
3、优选的,所述行走轮组件包括两个舵轮及差速转向轮,两个所述舵轮正对设置于所述底盘的后端,所述差速转向轮设置于两个所述舵轮的中线上,并靠近所述底盘的前端设置。
4、优选的,所述桶夹具包括设置在所述升降组件上的支架41,固定设置在该支架上的固定夹片及设置在该支架上的夹取装置,所述夹取装置上固定设有活动夹片,所述夹取装置用于调节活动夹片与固定夹片之间的距离,以实现夹取桶体。
5、优选的,所述夹取装置包括夹爪,所述夹爪中部与所述支架转动连接,所述夹爪的前端连接所述活动夹片,所述夹爪后端转动连接驱动装置。
6、优选的,所述夹爪为两个平行设置的l型片材,所述l型片材竖向部的中部均与所述支架通过第一转轴转动连接,两个所述l型片材横向部均与所述活动夹片固定连接,两个所述l型片材竖向部的端部通过第二转轴与所述驱动装置的输出端连接。
7、优选的,所述驱动装置为伺服电缸,该伺服电缸的底座通过第三转轴与所述支架连接,该伺服电缸的活塞杆端部与所述夹爪转动连接。
8、优选的,所述支架上固定安装有三个u型座,两个所述第一转轴分别转动安装于两个u型座,所述第一转轴固定穿设在所述l型片材的竖向部,另一个所述u型座转动安装有所述第三转轴,所述第三转轴与所述伺服电缸的底座固定连接。
9、优选的,所述支架上还固定安装有挡片,该挡片位于所述固定夹片的正下方。
10、优选的,所述固定夹片、所述活动夹片和所述挡片均为弧形片,所述固定夹片的凹面与所述活动夹片的凸面相匹配,所述挡片和所述固定夹片的尺寸相同。
11、优选的,所述支架上还安装有位移传感器。
12、优选的,所述差速转向轮包括固定安装在所述底盘的底板及转动安装于该底板的两个动力轮组,两个所述动力轮组的上部均穿出所述底板连接同一个第一驱动装置。
13、优选的,所述动力轮组包括水平板,所述水平板的上表面竖向安装有转轴,所述转轴的上端穿出所述底板与第一驱动装置驱动连接,所述水平板的下方设有动力轮,所述动力轮通过连接件与所述水平板转动连接,所述动力轮的轮轴驱动连接第二驱动装置。
14、优选的,所述第一驱动装置包括转向伺服电机、蜗杆及涡轮,所述转向伺服电机安装于所述底板上,所述涡轮固定安装于所述转轴上,所述蜗杆通过联轴器与所述转向伺服电机的输出端固定连接,所述蜗杆与涡轮啮合。
15、优选的,所述第二驱动装置包括动力伺服电机和齿轮减速器,所述齿轮减速器的输入端与所述动力伺服电机的输出端连接,所述齿轮减速器的输出端与所述动力轮的轮轴连接。
16、优选的,所述连接件包括正对设置的竖向板,所述竖向板与所述水平板的下表面固定连接,两块所述竖向板之间设有所述动力轮,所述动力轮轮轴的任一端穿出所述竖向板连接驱动连接所述第二驱动装置。
17、优选的,所述底板上开设有两个安装孔,各安装孔中均安装有回转支撑轴承,所述转轴与所述回转支撑轴承配合安装。
18、优选的,两块所述竖向板上分别安装有第一动力轮轴承座和第二动力轮轴承座,所述轮轴的一端与第一动力轮轴承座配合安装,所述轮轴的另一端穿出所述第二动力轮轴承座与所述第二驱动装置驱动连接。
19、优选的,所述底板上还设有两个带座轴承,两个所述带座轴承分别与所述蜗杆配合安装。
20、优选的,所述动力轮包括轮体,该轮体采用合金铝材质,轮体的周面设有聚氨酯层。
21、优选的,所述升降组件包括门型架,所述门型架的两竖向部与所述底盘固定连接,所述门型架的两竖向部之间水平设有横梁,所述横梁与所述门型架的横向部之间竖向设有丝杆,所述丝杆的两端分别与所述横梁、所述门型架的横向部转动连接,所述丝杆的下部固套有同步轮,所述同步轮通过同步带与设置在所述横梁上的提升电机驱动连接,所述丝杆上螺纹连接有丝杆螺母座,所述丝杆螺母座固定连接有安装板,所述安装板的两侧分别与所述门型架的两竖向部滑动连接,所述安装板上固定连接所述桶夹具。
22、优选的,所述导航控制系统包括设置在所述底盘上的磁导航传感器、rfid传感器、接触传感器、270°激光范围传感器、电池组、控制器及控制面板。
23、有益效果:与现有技术相比,本发明提供的一种桶仓储搬运磁导航agv,通过导航控制系统控制行走轮组件行走路径导航,精准转向,并控制桶夹具实现对桶体上沿凸起的夹取和打开,可适应不同种类的桶的稳定抓取,不会对桶体边缘造成损伤,实现200l桶装化学品的高效仓储,安全搬运,全自动智能化管理,降低生产成本。
技术特征:
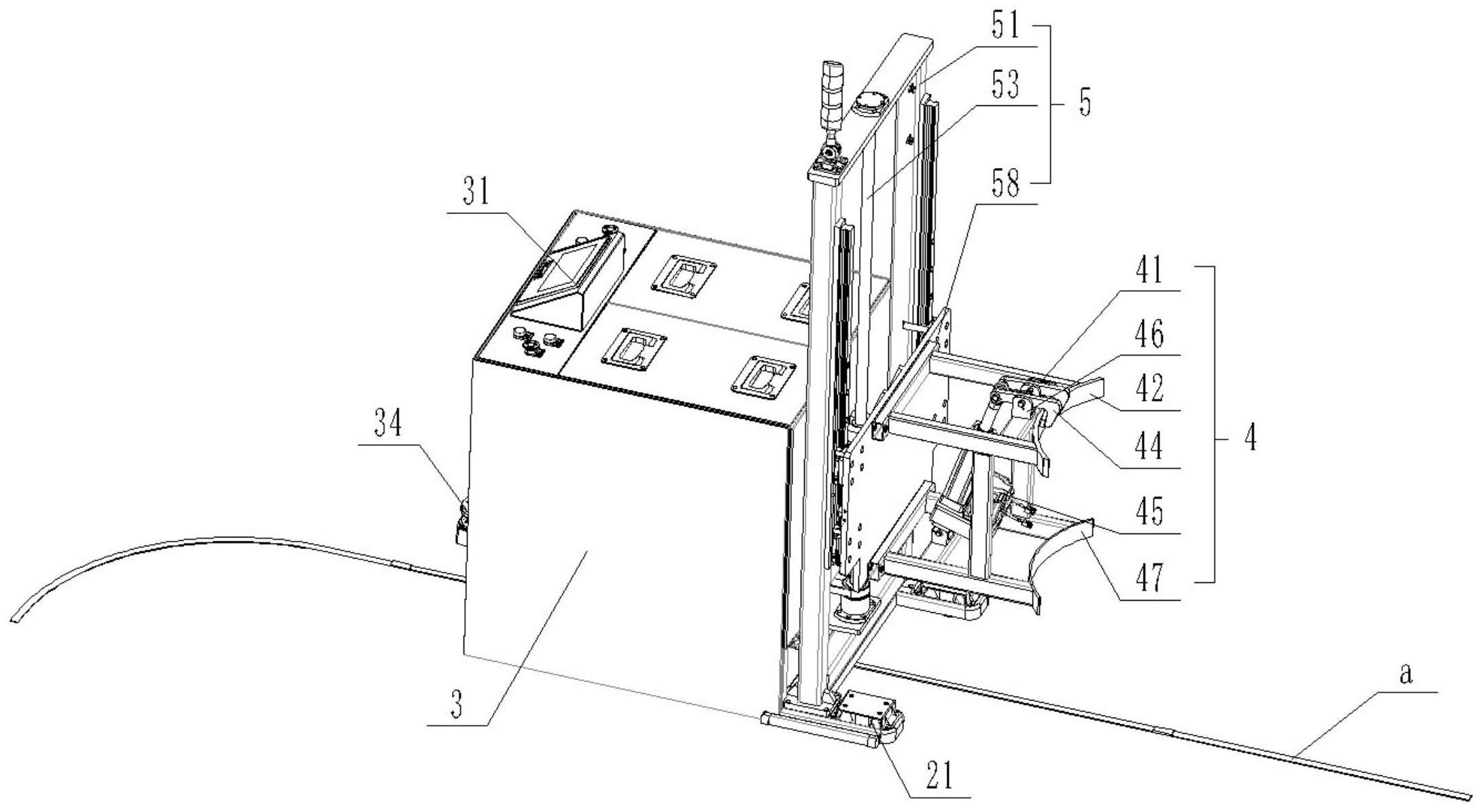
1.一种桶仓储搬运磁导航agv,其特征在于:包括底盘(1),所述底盘(1)上安装有行走轮组件(2)、导航控制系统(3)及桶夹具(4),所述桶夹具(4)通过升降组件(5)与所述底盘(1)固定连接。
2.根据权利要求1所述一种桶仓储搬运磁导航agv,其特征在于:所述行走轮组件(2)包括两个舵轮(21)及差速转向轮,两个所述舵轮(21)正对设置于所述底盘(1)的后端,所述差速转向轮设置于两个所述舵轮(21)的中线上,并靠近所述底盘(1)的前端设置;所述差速转向轮包括固定安装在所述底盘(1)的底板(22)及转动安装于该底板(22)的两个动力轮组(23),两个所述动力轮组(23)的上部均穿出所述底板(22)连接同一个第一驱动装置(24)。
3.根据权利要求2所述一种桶仓储搬运磁导航agv,其特征在于:所述动力轮组(23)包括水平板(231),所述水平板(231)的上表面竖向安装有转轴(232),所述转轴(232)的上端穿出所述底板(22)与第一驱动装置(24)驱动连接,所述水平板(231)的下方设有动力轮(233),所述动力轮(233)通过连接件(234)与所述水平板(231)转动连接,所述动力轮(233)的轮轴驱动连接第二驱动装置(235)。
4.根据权利要求2所述一种桶仓储搬运磁导航agv,其特征在于:所述第一驱动装置(24)包括转向伺服电机(241)、蜗杆(242)及涡轮(243),所述转向伺服电机(241)安装于所述底板(22)上,所述涡轮(243)固定安装于所述转轴(232)上,所述蜗杆(242)通过联轴器(244)与所述转向伺服电机(241)的输出端固定连接,所述蜗杆(242)与涡轮(243)啮合。
5.根据权利要求3所述一种桶仓储搬运磁导航agv,其特征在于:所述第二驱动装置(235)包括动力伺服电机(2351)和齿轮减速器(2352),所述齿轮减速器(2352)的输入端与所述动力伺服电机(2351)的输出端连接,所述齿轮减速器(2352)的输出端与所述动力轮(233)的轮轴连接。
6.根据权利要求2所述一种桶仓储搬运磁导航agv,其特征在于:所述连接件(234)包括正对设置的竖向板,所述竖向板与所述水平板(231)的下表面固定连接,两块所述竖向板之间设有所述动力轮(233),所述动力轮(233)轮轴的任一端穿出所述竖向板连接驱动连接所述第二驱动装置(235);两块所述竖向板上分别安装有第一动力轮轴承座(27)和第二动力轮轴承座(28),所述轮轴的一端与第一动力轮轴承座(27)配合安装,所述轮轴的另一端穿出所述第二动力轮轴承座(28)与所述第二驱动装置(235)驱动连接。
7.根据权利要求1所述一种桶仓储搬运磁导航agv,其特征在于:所述桶夹具(4)包括设置在所述升降组件(5)上的支架(41),固定设置在该支架(41)上的固定夹片(42)、设置在该支架(41)上的夹取装置、位移传感器(48)及挡片(47),该挡片(47)位于所述固定夹片(42)的正下方,所述夹取装置上固定设有活动夹片(43),所述夹取装置用于调节活动夹片(43)与固定夹片(42)之间的距离,以实现夹取桶体;所述夹取装置包括夹爪(44),所述夹爪(44)中部与所述支架(41)转动连接,所述夹爪(44)的前端连接所述活动夹片(43),所述夹爪(44)后端转动连接驱动装置(45)。
8.根据权利要求7所述一种桶仓储搬运磁导航agv,其特征在于:所述夹爪(44)为两个平行设置的l型片材(441),所述l型片材(441)竖向部的中部均与所述支架(41)通过第一转轴(442)转动连接,两个所述l型片材(441)横向部均与所述活动夹片(43)固定连接,两个所述l型片材(441)竖向部的端部通过第二转轴(443)与所述驱动装置(45)的输出端连接;所述驱动装置(45)为伺服电缸,该伺服电缸的底盘通过第三转轴(451)与所述支架(41)连接,该伺服电缸的活塞杆端部与所述夹爪(44)转动连接。
9.根据权利要求1所述一种桶仓储搬运磁导航agv,其特征在于:所述升降组件(5)包括门型架(51),所述门型架(51)的两竖向部与所述底盘(1)固定连接,所述门型架(51)的两竖向部之间水平设有横梁(52),所述横梁(52)与所述门型架(51)的横向部之间竖向设有丝杆(53),所述丝杆(53)的两端分别与所述横梁(52)、所述门型架(51)的横向部转动连接,所述丝杆(53)的下部固套有同步轮(54),所述同步轮(54)通过同步带(55)与设置在所述横梁上的提升电机(56)驱动连接,所述丝杆(53)上螺纹连接有丝杆螺母座(57),所述丝杆螺母座(57)固定连接有安装板(58),所述安装板(58)的两侧分别与所述门型架(51)的两竖向部滑动连接,所述安装板(58)上固定连接所述桶夹具(4)。
10.根据权利要求1所述一种桶仓储搬运磁导航agv,其特征在于:所述导航控制系统(3)包括设置在所述底盘(1)上的磁导航传感器(31)、rfid传感器(32)、接触传感器(33)、270°激光范围传感器(34)、电池组(35)、控制器(36)及控制面板(37)。
技术总结
本发明涉及智能化的仓储设备领域,特别涉及一种桶仓储搬运磁导航AGV,包括底盘,所述底盘上安装有行走轮组件、导航控制系统及桶夹具,所述桶夹具通过升降组件与所述底盘固定连接。与现有技术相比,本发明提供的一种桶仓储搬运磁导航AGV,通过导航控制系统控制行走轮组件行走路径导航,精准转向,并控制桶夹具实现对桶体上沿凸起的夹取和打开,可适应不同种类的桶的稳定抓取,不会对桶体边缘造成损伤,实现200L桶装化学品的高效仓储,安全搬运,全自动智能化管理,降低生产成本。
技术研发人员:陈华金,严信,郑圣弘
受保护的技术使用者:江苏融科装备科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!