一种全自动搬运车的控制装置的制作方法
1.本实用新型涉及控制装置技术领域,特别是涉及一种全自动搬运车的控制装置。
背景技术:
2.无人搬运车已经是过去几十年发展起来的一个应用于工业生产中成品和半成品物料搬运的运载工具。无人搬运车英文名称(automated guidedvehicle,agv),是指具备有电磁或者光学等自动引导装置的能够沿规定路线行进的,动力采用蓄电池作为主要动力源,具有各种保护功能和应用功能的无人操作设备。无人运载工具在上世纪五十年代就开始大量在汽车等领域的工厂和码头普及。目前的agv小车主要是使用电脑系统进行控制,小车运行过程中的状态是电脑统一管理和控制的。
3.授权公告号为cn203480310u的中国专利公开了一种闭环控制的无人搬运车驱动装置,其特征是:包括驱动车架,与驱动车架固定连接的右从动轮轴心、左从动轮轴心,安装于相应从动轮轴心上的从动轮子,各从动轮子分别与对应链轮连接,各链轮分别由相应的电机驱动;立轴通过转向轴承座与驱动车架可转动连接;立轴其下端穿过驱动车架,立轴其下端设有探测立轴和驱动车架之间转动角度的旋转编码器;立轴其上端设有伸缩机构,其具有由此不会出现转弯时候卡死不动,增加了agv小车实际运行中的稳定性等优点。
4.但是上述已公开方案存在如下不足之处:上述方案中通过电机与滚轮的驱动使得上述装置仅能够通过人工遥控使用,无法自动化循迹运动,降低了自动化程度的同时,提高了人工遥控成本。
技术实现要素:
5.本实用新型的目的是针对背景技术中存在的技术问题,本实用新型提出一种全自动搬运车的控制装置,本实用新型通过距离传感器与摄像头的组合能够有效的提高本装置的自动化效果,同时避免了撞击。
6.本实用新型提出了一种全自动搬运车的控制装置,包括底座、滚轮、壳体、接收器、摄像头、连接支架、距离传感器、连接环、安装板和升降电机;
7.底座侧面与滚轮转动连接;底座与顶部与壳体连接;底座顶部与升降电机连接;升降电机输出端与连接支架传动连接;连接支架远离升降电机的一端与摄像头连接;底座顶部与距离传感器连接;距离传感器对称设置于升降电机两侧;底座顶部与安装板连接;安装板上设有中控模块;中控模块与距离传感器通讯连接;中控模块与摄像头通讯连接;中控模块与滚轮控制连接;中控模块与接收器通讯连接;底座侧面与连接环连接。
8.优选的,滚轮上设有防滑层,底座底部设有独立驱动电机,独立驱动电机与滚轮传动连接,独立驱动电机与中控模块控制连接。
9.优选的,底座上设有转动阻挡件,转动阻挡件侧面与连接支架接触。
10.优选的,安装板底部设有减震装置,减震装置底部与底座顶部连接。
11.优选的,接收器底部设有转码模块,转码模块与接收器通讯连接,转码模块与安装
板通讯连接。
12.优选的,壳体上设有通孔,接收器穿过通孔,接收器高度高于壳体高度。
13.优选的,摄像头底部设有转动连接件,转动连接件与连接支架转动连接。
14.优选的,安装板侧面上设有数据接口,数据接口与中控模块通讯连接。
15.本实用新型的上述技术方案具有如下有益的技术效果:
16.本实用新型通过距离传感器与摄像头的组合能够有效的提高本装置的自动化效果,同时避免了撞击,通过本装置的距离传感器能够有效的控制多组本装置之间的运动间距,保证了运输的稳定性,顶部的接收器能够便于加强本装置信号接收强度,从而保证了本装置的遥控信号强度。
附图说明
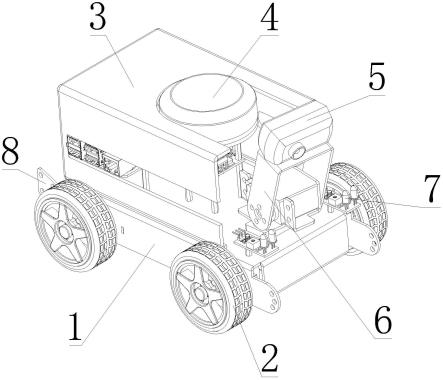
17.图1为本实用新型一种全自动搬运车的控制装置的实施例的结构示意图;
18.图2为本实用新型提出的一种全自动搬运车的控制装置中安装板的结构示意图;
19.图3为本实用新型提出的一种全自动搬运车的控制装置的侧视图;
20.附图标记:1、底座;2、滚轮;3、壳体;4、接收器;5、摄像头;6、连接支架;7、距离传感器;8、连接环;9、安装板;10、中控模块;11、升降电机。
具体实施方式
21.实施例一
22.如图1-3所示,本实用新型提出的一种全自动搬运车的控制装置,包括底座1、滚轮2、壳体3、接收器4、摄像头5、连接支架6、距离传感器7、连接环8、安装板9和升降电机11;
23.底座1侧面与滚轮2转动连接;底座1与顶部与壳体3连接;底座1顶部与升降电机11连接;升降电机11输出端与连接支架6传动连接;连接支架6 远离升降电机11的一端与摄像头5连接;底座1顶部与距离传感器7连接;距离传感器7对称设置于升降电机11两侧;底座1顶部与安装板9连接;安装板 9上设有中控模块10;中控模块10与距离传感器7通讯连接;中控模块10与摄像头5通讯连接;中控模块10与滚轮2控制连接;中控模块10与接收器4 通讯连接;底座1侧面与连接环8连接;底座1上设有转动阻挡件,转动阻挡件侧面与连接支架6接触;安装板9底部设有减震装置,减震装置底部与底座1 顶部连接;壳体3上设有通孔,接收器4穿过通孔,接收器4高度高于壳体3 高度;摄像头5底部设有转动连接件,转动连接件与连接支架6转动连接;安装板9侧面上设有数据接口,数据接口与中控模块10通讯连接。
24.本实施例中,通过滚轮2与摄像头5能够有效的提高本装置的自动化运行效率,当本装置处于工作状态时,通过接收器4能够有效的提高本装置信号接收强度,通过安装板9与中控模块10能够进行有效的统一控制,从而降低了工作人员的遥控难度,通过摄像头5能够便于工作人员远程控制,从而能够清晰的显示当前小车的运行位置和当前周围环境,保证了本装置运行的稳定性,通过距离传感器7能够有效的对过近的物体产生警报,从而提高了本装置的运输稳定性,通过壳体3顶部和尾部的连接环8能够进行托举或者拖拽的方式进行运输。
25.实施例二
26.如图2-3所示,本实用新型提出的一种全自动搬运车的控制装置,相较于实施例
一,本实施例中,滚轮2上设有防滑层,底座1底部设有独立驱动电机,独立驱动电机与滚轮2传动连接,独立驱动电机与中控模块10控制连接;接收器4底部设有转码模块,转码模块与接收器4通讯连接,转码模块与安装板9 通讯连接。
27.本实用新型的一个实施例中,通过本装置的防滑层能够提高本装置运动稳定性,通过转码模块能够实现光电信号转化,从而提高了信息稳定性。
28.上面结合附图对本实用新型的实施方式作了详细说明,但是本实用新型并不限于此,在所属技术领域的技术人员所具备的知识范围内,在不脱离本实用新型宗旨的前提下还可以作出各种变化。
技术特征:
1.一种全自动搬运车的控制装置,其特征在于,包括底座(1)、滚轮(2)、壳体(3)、接收器(4)、摄像头(5)、连接支架(6)、距离传感器(7)、连接环(8)、安装板(9)和升降电机(11);底座(1)侧面与滚轮(2)转动连接;底座(1)与顶部与壳体(3)连接;底座(1)顶部与升降电机(11)连接;升降电机(11)输出端与连接支架(6)传动连接;连接支架(6)远离升降电机(11)的一端与摄像头(5)连接;底座(1)顶部与距离传感器(7)连接;距离传感器(7)对称设置于升降电机(11)两侧;底座(1)顶部与安装板(9)连接;安装板(9)上设有中控模块(10);中控模块(10)与距离传感器(7)通讯连接;中控模块(10)与摄像头(5)通讯连接;中控模块(10)与滚轮(2)控制连接;中控模块(10)与接收器(4)通讯连接;底座(1)侧面与连接环(8)连接。2.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,滚轮(2)上设有防滑层,底座(1)底部设有独立驱动电机,独立驱动电机与滚轮(2)传动连接,独立驱动电机与中控模块(10)控制连接。3.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,底座(1)上设有转动阻挡件,转动阻挡件侧面与连接支架(6)接触。4.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,安装板(9)底部设有减震装置,减震装置底部与底座(1)顶部连接。5.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,接收器(4)底部设有转码模块,转码模块与接收器(4)通讯连接,转码模块与安装板(9)通讯连接。6.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,壳体(3)上设有通孔,接收器(4)穿过通孔,接收器(4)高度高于壳体(3)高度。7.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,摄像头(5)底部设有转动连接件,转动连接件与连接支架(6)转动连接。8.根据权利要求1所述的一种全自动搬运车的控制装置,其特征在于,安装板(9)侧面上设有数据接口,数据接口与中控模块(10)通讯连接。
技术总结
本实用新型涉及控制装置领域,具体为一种全自动搬运车的控制装置,包括底座、滚轮、壳体、接收器、摄像头、连接支架、距离传感器、连接环、安装板和升降电机;底座侧面与滚轮转动连接;底座与顶部与壳体连接;底座顶部与升降电机连接;升降电机输出端与连接支架传动连接;连接支架远离升降电机的一端与摄像头连接;底座顶部与距离传感器连接;距离传感器对称设置于升降电机两侧;底座顶部与安装板连接;安装板上设有中控模块;中控模块与距离传感器通讯连接;中控模块与摄像头通讯连接。本实用新型通过距离传感器与摄像头的组合能够有效的提高本装置的自动化效果,同时避免了撞击。同时避免了撞击。同时避免了撞击。
技术研发人员:於庆峰 许国园 赵玲芳
受保护的技术使用者:浙江汉姆机电设备制造有限公司
技术研发日:2022.02.17
技术公布日:2022/8/26
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1