恒压力安全自锁爬杆机器人的制作方法
1.本实用新型涉及电力检修设备,具体涉及一种恒压力安全自锁爬杆机器人。
背景技术:
2.爬杆机器人是配电网电力检修的设备,其用途是沿电线杆上下输送检修作业人员。爬杆机器人既能够克服人力使用脚扣爬杆耗费体力,安全性差的缺陷;又能够克服绝缘梯或载人绝缘斗臂车对环境要求高,环境不符合要求不方便作业的缺陷;还能够克服人工组建绝缘平台组建施工量大,设备运输不方便,平台功能少,灵活性差,特别是杆上转位、升降等功能不满足高效施工需求的缺陷,具有理想的应用前景。但是现有爬杆机器人也存在一定的缺点,一是对电线杆的压力不够恒定,压力达不到要求时容易出现倾斜现象;二是自锁能力差,在发生意外情况时不能安全锁紧在电线杆上,容易出现打滑现象。由于其安全性还不够高,还有待于进一步改进和完善。
技术实现要素:
3.本实用新型的目的是针对现有爬杆机器人的不足,提供一种对电线杆的压力恒定,具有防止意外下落的自锁功能,使用起来更加安全可靠的恒压力安全自锁爬杆机器人。
4.本实用新型的技术解决方案是:它包括环杆框架、爬杆机构和推杆机构,环杆框架由一侧相铰接、另一侧通过快速连接销杆可拆卸连接的爬杆机构架和推杆机构架构成,爬杆机构由相配合安装在爬杆机构架上的两个爬杆辊轮组构成,每个爬杆辊轮组分别由两个爬杆辊轮和一个爬杆电机构成,两个爬杆辊轮分别转动安装在爬杆机构架上,爬杆电机与一个爬杆辊轮相连,两个爬杆辊轮轴上分别设有通过链条相连的链轮,推杆机构包括有推杆辊轮组、滑架、压簧、丝杠和推杆电机,滑架沿电线杆的径向滑动安装在推杆机构架上,推杆辊轮组沿电线杆的径向滑动安装在滑架上,压簧安装在推杆辊轮组和滑架之间使推杆辊轮组向电线杆方向伸展,丝杠转动安装在推杆机构架上并与滑架上的丝母相配合,推杆电机安装在推杆机构架上并通过过载离合器与丝杠相连,滑架与推杆机构架之间设有自锁机构,自锁机构包括有单向齿条、锁齿和解锁电机,单向齿条沿滑架的滑动方向安装在推杆机构架上,锁齿与单向齿条相配合安装在滑架上,在滑架向电线杆滑动时起到自锁作用,解锁电机与锁齿相配合安装在滑架上,在滑架回退时使锁齿脱离开单向齿条实现解锁。
5.本实用新型的技术效果是:它对电线杆的压力恒定,不会出现倾斜现象,攀爬更加平稳,爬升和不升降时具有防止意外下落的自锁功能,使用起来更加安全可靠。它结构轻便合理,节省动力,运行稳定性好,能够安全可靠地载着检修作业人员沿着电线杆上下攀爬,并可以锁定在合适的高度进行检修作业,更加便于检修工作的顺利进行。它既可以采用手动按键方式操作,也可以采用遥控方式操作,操作使用灵活方便。
附图说明
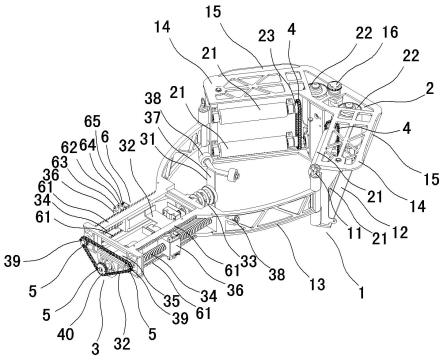
6.图1为本实用新型实施例立体结构图。
具体实施方式
7.如图1所示,它包括环杆框架1、爬杆机构2和推杆机构3,环杆框架1由一侧相铰接、另一侧通过快速连接销杆11可拆卸连接的爬杆机构架12和推杆机构架13构成,爬杆机构2由相配合安装在爬杆机构架12上的两个爬杆辊轮组构成,每个爬杆辊轮组分别由两个爬杆辊轮21和一个爬杆电机22构成,两个爬杆辊轮21分别转动安装在爬杆机构架12上,爬杆电机22与一个爬杆辊轮21相连,两个爬杆辊轮21轴上分别设有通过链条4相连的链轮23,推杆机构3包括有推杆辊轮组31、滑架32、压簧33、丝杠34和推杆电机35,滑架32沿电线杆的径向滑动安装在推杆机构架13上,推杆辊轮组31沿电线杆的径向滑动安装在滑架32上,压簧33安装在推杆辊轮组31和滑架32之间使推杆辊轮组31向电线杆方向伸展,丝杠34转动安装在推杆机构架13上并与滑架32上的丝母36相配合,推杆电机35安装在推杆机构架13上并通过过载离合器5与丝杠34相连,滑架32与推杆机构架13之间设有自锁机构6,自锁机构6包括有单向齿条61、锁齿62和解锁电机63,单向齿条61沿滑架32的滑动方向安装在推杆机构架13上,锁齿62与单向齿条61相配合安装在滑架32上,在滑架32向电线杆滑动时起到自锁作用,解锁电机63与锁齿62相配合安装在滑架32上,在滑架32回退时使锁齿62脱离开单向齿条61实现解锁。
8.每个爬杆辊轮组的两个爬杆辊轮21沿电线杆的轴向一上一下转动安装在爬杆机构架12上,两个爬杆辊轮组的爬杆辊轮21呈v字形排布安装在爬杆机构架12上。
9.爬杆机构架12上设有两个相互呈v字形排布的脚踏板14。
10.两个脚踏板14远离电线杆的边部分别设有朝向上方的防滑立沿15。
11.爬杆机构架12上两个脚踏板14之间的位置设有与控制器相连的脚踏控制按钮16。
12.脚踏板14、爬杆机构架12和推杆机构架13均为保证强度并减轻自重,有利于节省动力的镂空结构。
13.推杆辊轮组31由辊轮架37和四个转动安装在辊轮架37上的推杆辊轮38构成,两个推杆辊轮38呈v字形位于上方、另外两个推杆辊轮38相配合呈v字形位于下方。
14.推杆机构3包括有转动安装在推杆机构架13上的两根丝杠34,每根丝杠34分别与安装在滑架32上的丝母36相配合,每根丝杠34的轴端分别安装有一个过载离合器5,过载离合器5上设有从动链轮39,安装于推杆电机35输出轴上的过载离合器5上安装有主动链轮40,主动链轮40通过一根链条4与两个从动链轮39相连,推杆电机35通过各过载离合器5、链条4、丝杠34、滑架32和压簧33使推杆辊轮组31对电线杆产生推力。
15.自锁机构6包括有四根单向齿条61、四个锁齿62和四个解锁电机63,与两根丝杠34相配合的每个丝母36上分别安装有两个锁齿62和两个解锁电机63,四根单向齿条61相互平行分别与各锁齿62相配合安装在推杆机构架13上。
16.锁齿62的中部通过锁齿轴64铰接在丝母36上,锁齿62的头部与单向齿条61相配合,尾部与丝母36之间设有复位弹簧65,解锁电机63轴上设有断电时挡住锁齿62的尾部,使锁齿62头部与单向齿条61相配合的卡块,解锁电机63通电时卡块转过一个角度让开锁齿62,锁齿62在复位弹簧65作用下绕锁齿轴64旋转一个角度,头部避开单向齿条61,解除对单向齿条61的自锁作用。
17.爬杆电机22和推杆电机35均为减速电机。
18.工作原理:
19.本机器人使用时需要将爬杆机构架12和推杆机构架13之间的快速连接销杆11打开,使环杆框架1环抱在电线杆上,再用快速连接销杆11将爬杆机构架12和推杆机构架13连接起来。爬杆机构2两个爬杆辊轮组的爬杆辊轮21相配合呈v字形夹在电线杆的外表面上,推杆机构3的推杆辊轮组31从对侧压在电线杆的外表面上,使机器人紧抱在电线杆上。
20.爬杆时,通过控制器控制爬杆电机22正向转动,使各爬杆辊轮21在电线杆上产生向上的爬杆力。同时控制推杆电机35正向转动,推杆电机35通过推杆辊轮组31对电线杆产生压力,以配合爬杆辊轮21工作。当各过载离合器5受到的扭力超过设定值时,该过载离合器5会自动使传动离断(推杆电机35一直在转动),以防止推杆辊轮组31对电线杆的压力过大影响机器人爬升,并保证推杆机构3对电线杆具有恒定的压力。这种自动恒压力推杆机构可以防止推杆机构损坏,并可以使机器人沿电线杆向上平稳爬升,也可以使简化爬杆机器人的控制方式。
21.随着爬杆机器人向上爬升,电线杆逐渐变细,滑架32也逐渐向电线杆中心方向移动,在这个过程中自锁机构6的各单向齿条61与各锁齿62分别相配合实现自锁。在推杆机构3对电线杆的压力不够或推杆机构3出现故障时,可保证推杆辊轮组31不会回退,使机器人可以牢固地抱紧在电线杆上,以保障机器人和检修人员的安全。当机器人到达合适的高度时,爬杆电机22和推杆电机35停止转动,机器人停止爬升,自锁机构6还可以使机器人锁定在电线杆上位置高度不再变化,以便于检修人员安全作业。
22.向下爬杆前自锁机构6的各解锁电机63动作,使锁齿62与单向齿条61脱离开,不再对滑架32具有自锁作用。机器人下降时控制器控制爬杆电机22反向转动,使机器人向下爬杆,推杆电机35根据设定好的速度反向慢速转动。随着电线杆逐渐变粗,推杆辊轮组31逐渐远离电线杆的中心,推杆机构3的各过载离合器5仍然起到恒压力作用,保证推杆辊轮组31对电线杆具有足够和恒定的压力,以达到安全下降的目的。
23.机器人下落到地面时,再次将爬杆机构架12和推杆机构架13之间的快速连接销杆11打开,就可以将机器人从电线杆上取下,使用起来快速方便又安全。
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1