AGV手自动行驶控制电路的制作方法
agv手自动行驶控制电路
技术领域
1.本实用新型涉及agv技术领域,尤其涉及一种agv手自动行驶控制电路。
背景技术:
2.agv属于无人驾驶车辆,需要在工作区域布置导航机构,通过程序指令自动完成货物搬运和堆放,超出此工作区域便不能工作,有些区域不便建立导航机构,需手动行驶,因此需要提供一种agv,需兼具自动和手动行驶功能,便于更好适应不同场合工作。
技术实现要素:
3.本实用新型旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本实用新型的一个目的在于提出一种agv手自动行驶控制电路,实现了手动操作与自动行驶模式的自由切换。
4.根据本实用新型提出的一种agv手自动行驶控制电路,包括锂电池、钥匙开关、dc-dc转换器、手动开关、自动开关、行走电机、激光传感器、制动器,所述钥匙开关的一端与所述锂电池的正极连接,所述钥匙开关的另一端与所述dc-dc转换器的信号输入端连接,
5.所述手动开关与所述自动开关并联构成开关选择电路,所述开关选择电路与所述行走电机串联构成第一电路,
6.所述激光传感器与所述制动器并联构成第二电路,
7.所述第一电路与所述第二电路并联构成第三电路,
8.所述第三电路的一端与所述dc-dc转换器的信号输出端连接,所述第三电路的另一端与所述锂电池的负极连接,
9.还包括第一继电器、第二继电器,所述第一继电器线圈接入开关选择电路靠近所述手动开关的支路中,所述第二继电器常开触点接入第二电路靠近所述制动器的支路中,所述第二继电器线圈与所述第一继电器常闭触点串联连接接入所述第二电路靠近所述激光传感器输出端一侧的支路中。
10.优选地,所述第一电路一端连接有保险丝一。
11.优选地,所述第二电路的一端连接有保险丝二。
12.优选地,所述制动器安装在所述行走电机的输出轴处。
13.优选地,所述dc-dc转换器为直流48v转直流24v。
14.本实用新型中的有益效果是:通过手动开关与自动开关并联可自由切换手动模式或者自动行驶模式,便于更好适应不同场合工作,同时在自动行驶模式下,通过激光传感器检测是否有障碍物,若检测到障碍物激光传感器输出高电平使得第二继电器线圈导通,使得第二继电器常开触点导通,制动器接通,使得行走电机停止工作,agv停止行驶,自动行驶模式下具有遇到障碍物停止的功能,并且在手动模式下,手动开关导通,第一继电器线圈导通,使得第一继电器常闭触点断开,第二继电器常开触点也断开,激光传感器不工作,不会对agv手动行驶造成干扰。
附图说明
15.在附图中:
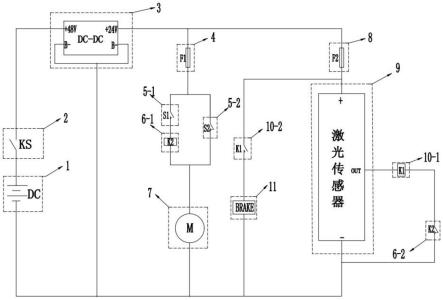
16.图1为本实用新型提出的一种agv手自动行驶控制电路的电路原理图。
17.图中:1、锂电池;2、钥匙开关;3、dc-dc转换器;4、保险丝一;5-1、手动开关;5-2、自动开关;6-1、第一继电器线圈;6-2、第一继电器常闭触点;7、行走电机;8、保险丝二;9、激光传感器;10-1、第二继电器线圈;10-2、第二继电器常开触点;11、制动器。
具体实施方式
18.参照图1,一种agv手自动行驶控制电路,包括锂电池1、钥匙开关2、dc-dc转换器3、手动开关5-1、自动开关5-2、行走电机7、激光传感器9、制动器11,钥匙开关2的一端与锂电池1的正极连接,钥匙开关2的另一端与dc-dc转换器3的信号输入端连接,
19.手动开关5-1与自动开关5-2并联构成开关选择电路,开关选择电路与行走电机7串联构成第一电路,
20.激光传感器9与制动器11并联构成第二电路,
21.第一电路与第二电路并联构成第三电路,
22.第三电路的一端与dc-dc转换器3的信号输出端连接,第三电路的另一端与锂电池1的负极连接,
23.还包括第一继电器、第二继电器,第一继电器线圈6-1接入开关选择电路靠近手动开关5-1的支路中,第二继电器常开触点10-2接入第二电路靠近制动器11的支路中,第二继电器线圈10-1与第一继电器常闭触点6-2串联连接接入第二电路靠近激光传感器9输出端一侧的支路中。
24.第一电路一端连接有保险丝一4。
25.第二电路的一端连接有保险丝二8。
26.制动器11安装在行走电机7的输出轴处。
27.dc-dc转换器为直流48v转直流24v。
28.手动模式:闭合手动开关5-1,此时自动开关5-2断开,dc-dc转换器3输出+24v电压经过保险丝一4、手动开关5-1、给第一继电器线圈6-1和行走电机7上电,第一继电器常闭触点6-2断开,即使激光传感器9的感应区域内存在障碍物,激光传感器9输出端out的高电平信号,因为第一继电器常闭触点6-2断开不能形成回路,第二继电器线圈10-1断电,第二继电器开触点10-2保持原样,制动器11不通电,此时车辆正常运行,处于手动模式,人工操作agv即可。
29.自动模式:闭合自动开关5-2,此时手动开关5-1断开,dc-dc转换器3输出+24v电压经过保险丝一4、自动开关5-2给行走电机7上电,第一继电器线圈6-1断电,继电器一常闭触点6-2吸合,处于自动模式,当运行的路线中存在障碍物,并且在激光传感器9感应区域内,激光传感器9输出端口out输出高电平,第二继电器线圈10-1通电,第二继电器常开触点10-2闭合,制动器11通电,车辆停止运行,待解除障碍物时,激光传感器9输出端out输出低电平,此时继电器二线圈10-1断电,继电器二常开触点10-2再次断开,制动器11断电,车辆继续正常运行,从而实现手自动行驶功能。
技术特征:
1.一种agv手自动行驶控制电路,包括锂电池、钥匙开关、dc-dc转换器、手动开关、自动开关、行走电机、激光传感器、制动器,所述钥匙开关的一端与所述锂电池的正极连接,所述钥匙开关的另一端与所述dc-dc转换器的信号输入端连接,所述手动开关与所述自动开关并联构成开关选择电路,所述开关选择电路与所述行走电机串联构成第一电路,所述激光传感器与所述制动器并联构成第二电路,所述第一电路与所述第二电路并联构成第三电路,所述第三电路的一端与所述dc-dc转换器的信号输出端连接,所述第三电路的另一端与所述锂电池的负极连接,其特征在于:还包括第一继电器、第二继电器,所述第一继电器线圈接入开关选择电路靠近所述手动开关的支路中,所述第二继电器常开触点接入第二电路靠近所述制动器的支路中,所述第二继电器线圈与所述第一继电器常闭触点串联连接接入所述第二电路靠近所述激光传感输出端一侧的支路中。2.根据权利要求1所述的一种agv手自动行驶控制电路,其特征在于:所述第一电路一端连接有保险丝一。3.根据权利要求1所述的一种agv手自动行驶控制电路,其特征在于:所述第二电路的一端连接有保险丝二。4.根据权利要求1所述的一种agv手自动行驶控制电路,其特征在于:所述制动器安装在所述行走电机的输出轴处。5.根据权利要求1所述的一种agv手自动行驶控制电路,其特征在于:所述dc-dc转换器为直流48v转直流24v。
技术总结
本实用新型公开了一种AGV手自动行驶控制电路,包括锂电池、钥匙开关、DCDC转换器、手动开关、自动开关、行走电机、激光传感器、制动器,钥匙开关的一端与锂电池的正极连接,钥匙开关的另一端与DCDC转换器的信号输入端连接,手动开关与自动开关并联构成开关选择电路,开关选择电路与行走电机串联构成第一电路,激光传感器与制动器并联构成第二电路,第一电路与第二电路并联构成第三电路,第三电路的一端与DCDC转换器的信号输出端连接,第三电路的另一端与锂电池的负极连接,第一继电器线圈接入开关选择电路靠近手动开关的支路中,第二继电器常开触点接入第二电路靠近制动器的支路中。本实用新型实现了手动操作与自动行驶模式的自由切换。换。换。
技术研发人员:宋佳伟 李黎明
受保护的技术使用者:安徽合力股份有限公司
技术研发日:2022.11.21
技术公布日:2023/3/14
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1