一种机器人行走装置的水平调整工具的制作方法
本技术涉及机器人行走装置调平,具体而言,涉及一种机器人行走装置的水平调整工具。
背景技术:
1、目前,机器人移动方式有轮式、履带式以及腿足式。轮式和履带式在生活各领域已得到广泛应用,而腿足式还处于不断突破的上升期,还有很多创新点可以被发掘。腿足式具有前两种移动方式不具有的优势,腿足式移动机构具有多自由度,运动更具灵活性,能比较容易跨越障碍物体,对复杂地形有较强的适应能力。机器人在使用行走的过程中,会出现整体不水平的情况,对于某些具有运输功能的行走机器人而言,整体不水平则容易导致所运输的物品出现倾斜,从而导致运输物品受到损坏。
技术实现思路
1、本实用新型的目的在于提供一种机器人行走装置的水平调整工具,能够对机器人行走装置进行水平调整,避免机器人行走过程因失去水平而导致行走出现困难以及机器人受到损坏的情况发生。
2、本实用新型的实施例是这样实现的:
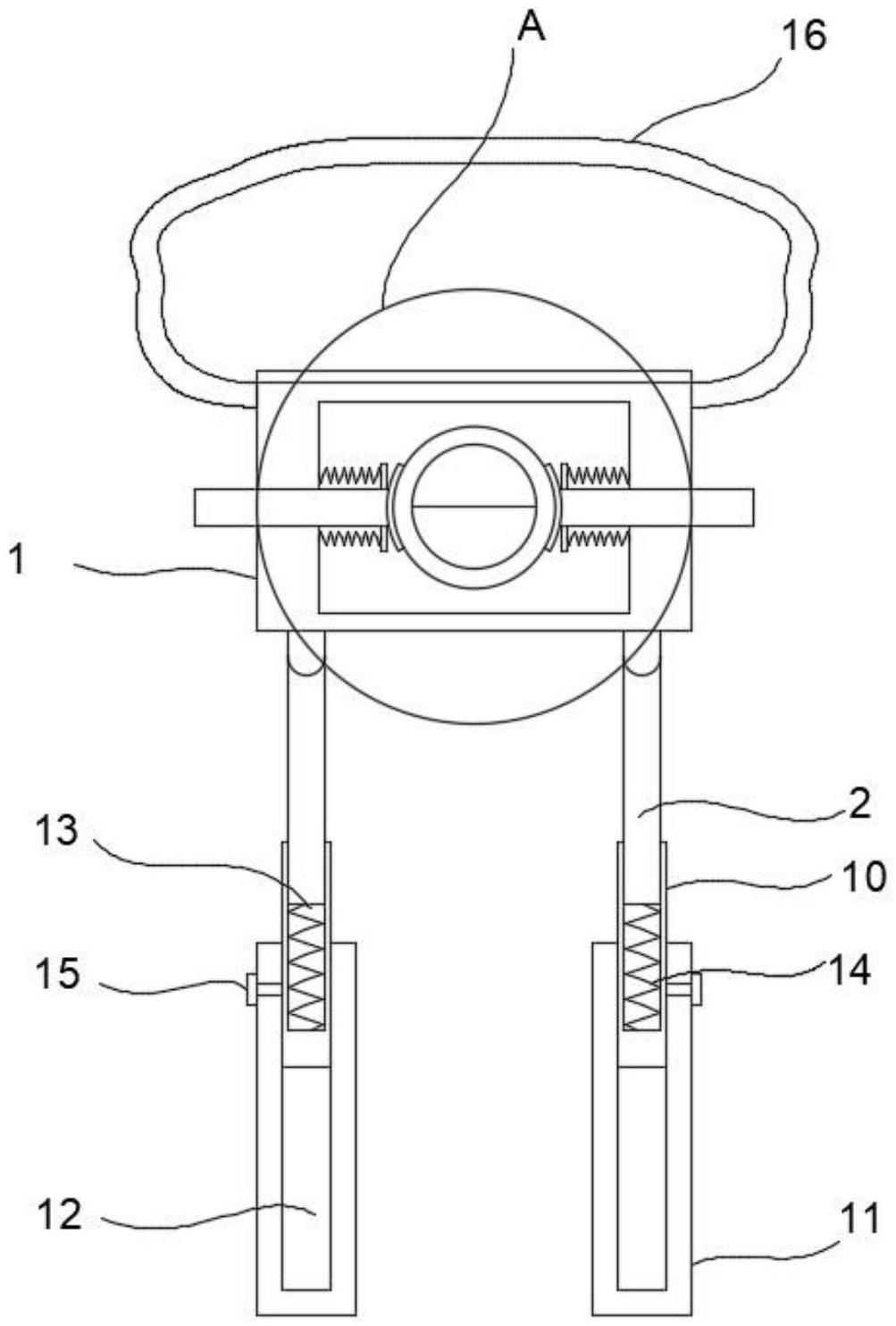
3、本申请实施例提供一种机器人行走装置的水平调整工具,包括固定块,上述固定块上开设有通孔,上述通孔上设有夹持件,上述夹持件上夹持有球壳,上述球壳的内部填充有液体,上述固定块上铰接有连接杆,上述连接杆的自由端上滑动连接有高度调节组件,上述固定块远离上述连接杆的一侧还设有固定组件。
4、在本实用新型的一些实施例中,上述夹持件包括夹持杆、夹持板、连接板和第一连接弹簧,上述固定块上开设有与上述通孔连通的滑孔,上述夹持杆滑动连接在上述滑孔上,上述夹持杆上设有夹持板,上述连接板设置在上述夹持杆的侧壁上,上述第一连接弹簧设置在上述连接板和上述固定块之间。
5、在本实用新型的一些实施例中,上述高度调节组件包括第一支撑杆、第二支撑杆和紧固螺栓,上述第二支撑杆上开设有第一滑槽,上述第一支撑杆与上述第一滑槽滑动连接,上述第二支撑杆上设有用于固定上述第一支撑杆的紧固螺栓。
6、在本实用新型的一些实施例中,上述第一支撑杆上开设有第二滑槽,上述连接杆与上述第二滑槽滑动连接,上述连接杆与上述第二滑槽的槽底之间设置有第二连接弹簧。
7、在本实用新型的一些实施例中,上述固定组件包括设置在上述固定块上的束紧带。
8、在本实用新型的一些实施例中,上述球壳上设有刻度线。
9、在本实用新型的一些实施例中,上述固定块上设有防护垫。
10、相对于现有技术,本实用新型的实施例至少具有如下优点或有益效果:
11、本申请实施例提供一种机器人行走装置的水平调整工具,包括固定块,上述固定块上开设有通孔,上述通孔上设有夹持件,上述夹持件上夹持有球壳,上述球壳的内部填充有液体,上述固定块上铰接有连接杆,上述连接杆的自由端上滑动连接有高度调节组件,上述固定块远离上述连接杆的一侧还设有固定组件。该水平工具包括固定块,固定块上开设通孔,通孔位于固定块的中间位置,在通孔上设置有夹持件,夹持件为多个,夹持件能够在通孔上滑动,在夹持件上夹持有球壳,球壳的内部填充液体,液体未填充满整个球壳,液体占球壳内部体积的一半。固定块上铰接有连接杆,连接杆能够在固定块上进行转动,连接杆远离固定块的一端上滑动连接有高度调节组件,高度调节组件能够对固定块进行高度调节。在固定块远离连接杆的另一侧上则设置有固定组件,固定组件也便于将固定块进行固定;本实用新型能够对机器人行走装置进行水平调整,避免机器人行走过程因失去水平而导致行走出现困难以及机器人受到损坏的情况发生。
12、在实际使用时,将固定块放置在机器人行走装置上,可通过连接块上的高度调节组件来将固定块支撑在地面上,即当机器人未运行时,固定块放置在机器人行走装置上,接着将固定块另一侧连接杆上滑动连接的高度调节组件来进行调节支撑,固定块的一侧和机器人行走装置相接触,另一侧则是通过铰接的连接杆以及滑动连接在连接杆上的高度调节组件来和地面之间进行接触,当机器人行走装置出现水平失衡时,此时的固定块与机器人行走装置之间相贴合并在连接杆和高度调节组件的支撑作用下,高度调节组件可以对固定块到地面的距离进行调整,以使得固定块和机器人行走装置之间始终贴合,若机器人行走装置不水平,在调整固定块和高度调节组件后,固定块上通过夹持件夹持的球壳内的液体则会发生相应的倾斜,通过倾斜来对整体机器人行走装置的水平调整;也可通过固定组件将固定块固定在机器人行走装置上,通过观察固定块夹持件上的球壳内液体的倾斜来进行水平调整,固定组件也可拆卸连接在固定块上。
技术特征:
1.一种机器人行走装置的水平调整工具,其特征在于,包括固定块,所述固定块上开设有通孔,所述通孔上设有夹持件,所述夹持件上夹持有球壳,所述球壳的内部填充有液体,所述固定块上铰接有连接杆,所述连接杆的自由端上滑动连接有高度调节组件,所述固定块远离所述连接杆的一侧还设有固定组件。
2.根据权利要求1所述的一种机器人行走装置的水平调整工具,其特征在于,所述夹持件包括夹持杆、夹持板、连接板和第一连接弹簧,所述固定块上开设有与所述通孔连通的滑孔,所述夹持杆滑动连接在所述滑孔上,所述夹持杆上设有夹持板,所述连接板设置在所述夹持杆的侧壁上,所述第一连接弹簧设置在所述连接板和所述固定块之间。
3.根据权利要求1所述的一种机器人行走装置的水平调整工具,其特征在于,所述高度调节组件包括第一支撑杆、第二支撑杆和紧固螺栓,所述第二支撑杆上开设有第一滑槽,所述第一支撑杆与所述第一滑槽滑动连接,所述第二支撑杆上设有用于固定所述第一支撑杆的紧固螺栓。
4.根据权利要求3所述的一种机器人行走装置的水平调整工具,其特征在于,所述第一支撑杆上开设有第二滑槽,所述连接杆与所述第二滑槽滑动连接,所述连接杆与所述第二滑槽的槽底之间设置有第二连接弹簧。
5.根据权利要求1所述的一种机器人行走装置的水平调整工具,其特征在于,所述固定组件包括设置在所述固定块上的束紧带。
6.根据权利要求1所述的一种机器人行走装置的水平调整工具,其特征在于,所述球壳上设有刻度线。
7.根据权利要求1所述的一种机器人行走装置的水平调整工具,其特征在于,所述固定块上设有防护垫。
技术总结
本技术提出了一种机器人行走装置的水平调整工具,涉及机器人行走装置调平技术领域。该水平工具包括固定块,固定块上开设有通孔,通孔上设有夹持件,夹持件上夹持有球壳,球壳的内部填充有液体,固定块上铰接有连接杆,连接杆的自由端上滑动连接有高度调节组件,固定块远离连接杆的一侧还设有固定组件。本技术能够对机器人行走装置进行水平调整,避免机器人行走过程因失去水平而导致行走出现困难以及机器人受到损坏的情况发生。
技术研发人员:李苏琼
受保护的技术使用者:苏州永硕智能科技有限公司
技术研发日:20221206
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!