一种工程施工探测用遥控车的制作方法
本技术属于远程遥控,涉及一种工程施工探测用遥控车。
背景技术:
1、三维激光扫描技术又被称为实景复制技术,是测绘领域继gps技术之后的一次技术革命,它突破了传统的单点测量方法,具有高效率、高精度的独特优势,三维激光扫描技术能够提供扫描物体表面的三维点云数据,因此可以用于获取高精度高分辨率的数字地形模型。
2、申请号cn202121784624.9,名称为《一种简易型三维激光扫描设备》公开车体上设置有转动的转动头,间隔120°的六个广角镜头可以把整个管径内的景象无遗漏地扫描上,相互重叠的部分可以建模时矫正。但是,地下管道这一类场景的行进路线除上下坡地势的改变,无多余的障碍物阻挡,故当前管径场合使用的遥控车缺乏应对障碍物多的场合能力,例如施工现场,如果把扫描仪暴露在遥控车前端,很容易碰到障碍物损坏扫描仪,所以亟待改进这类探测遥控车来克服障碍物带来的困难。
技术实现思路
1、本实用新型的目的是提供一种工程施工探测用遥控车,解决了当前管径场合使用的遥控车缺乏应对障碍物多能力的问题。
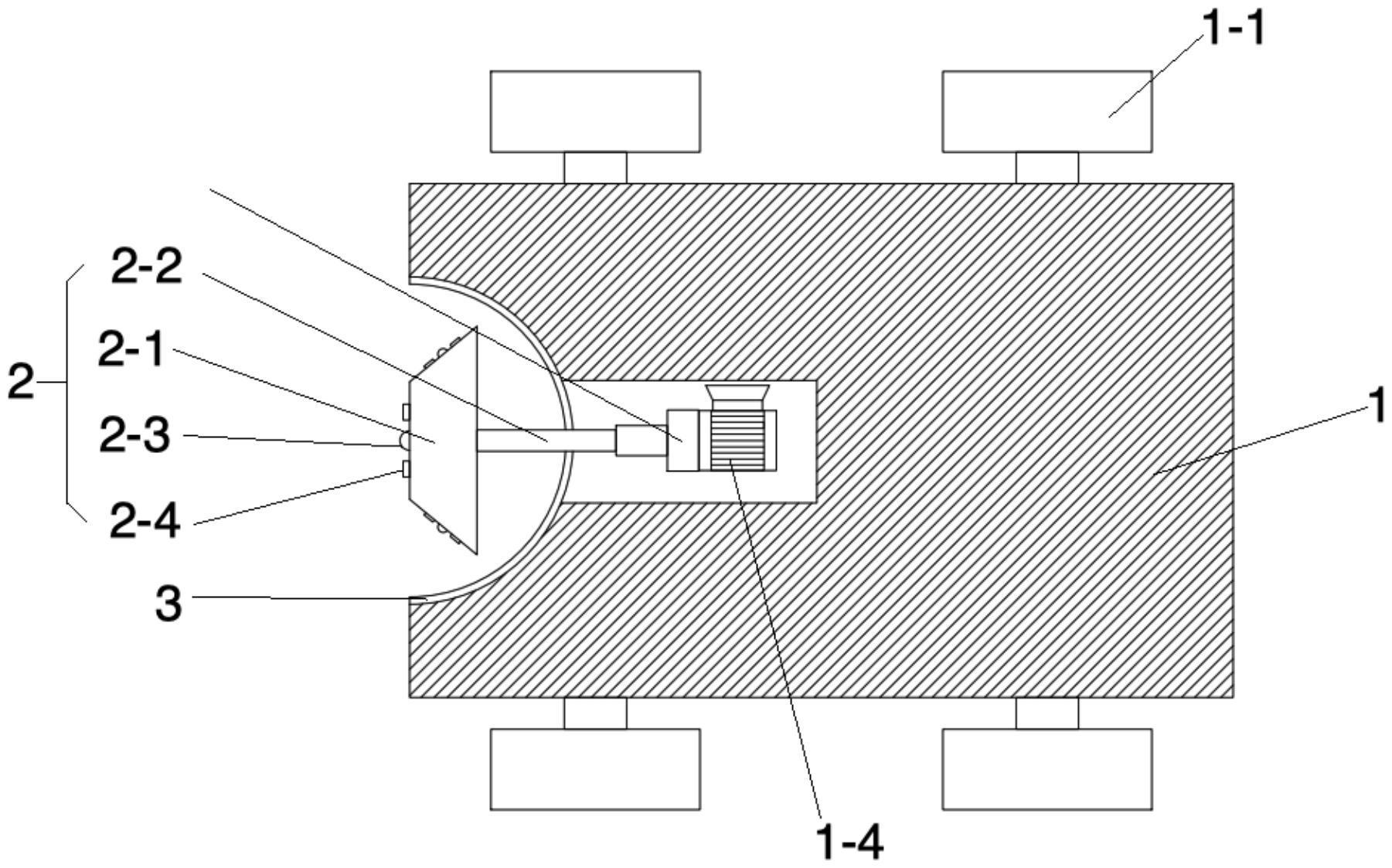
2、本实用新型所采用的技术方案是,一种工程施工探测用遥控车,包括有车体,车体的底部设置有四个驱动轮,每个驱动轮均连接有伺服电机,车体的前端端部设置有扫描仪组件,车体的侧面开设有半球形的安装槽,扫描仪组件设置在安装槽内,扫描仪组件包括有扫描仪本体,扫描仪本体为梯台结构,扫描仪本体的下底面固接有安装杆的一端,安装杆的另一端连接在安装槽内壁,扫描仪本体的上底面及两个侧腰面设置有摄像头。
3、本实用新型的特点还在于:
4、车体的底部还竖直设置有电动液压杆,电动液压杆的端部转动连接有从动轮,从动轮半径小于驱动轮,电动液压杆与从动轮设置在驱动轮的一侧。
5、车体内部开设有安装腔,安装腔与安装槽连通,安装腔内设置有驱动电机,驱动电机的输出轴通过联轴器固接安装杆。
6、扫描仪本体与水平面平行,扫描仪本体的上底面与安装槽的开口在同一平面,扫描仪本体的下底长度与安装槽的直径的长度比为2:3~3:4。
7、扫描仪本体横截面为等腰梯形,等腰梯形的顶角为120°~123.5°,摄像头设置在上底面与侧腰面的中心,摄像头的最大拍摄角度为120°,相邻两个摄像头2-3重合视野的角度为60°~66.5°。
8、上底面设置有两个光源,两个光源对称设置在摄像头两侧。
9、侧腰面设置有两个光源,两个光源对称设置在摄像头两侧。
10、安装槽内壁涂覆有反光层。
11、本实用新型的有益效果是:
12、本方案把原本设置在车体外部转动头收纳入车椅,利用半球形的安装槽为扫描仪本体提供安装空间,并且还能保障扫描仪本体能够正常转动。因为扫描仪本体安装在车体空间内,所以避免扫描仪本体暴露在车体外碰触障碍物。并且半球形的安装槽与反光层组合成为一个聚光罩,让本来就缺少光源的施工区域得到更稳定的光源,确保图像采集的效果。
技术特征:
1.一种工程施工探测用遥控车,包括有车体(1),所述车体(1)的底部设置有四个驱动轮(1-1),每个所述驱动轮(1-1)均连接有伺服电机,其特征在于,车体(1)的前端端部设置有扫描仪组件(2),车体(1)的侧面开设有半球形的安装槽,扫描仪组件(2)设置在所述安装槽内,所述扫描仪组件(2)包括有扫描仪本体(2-1),所述扫描仪本体(2-1)为梯台结构,扫描仪本体(2-1)的下底面固接有安装杆(2-2)的一端,所述安装杆(2-2)的另一端连接在安装槽内壁,扫描仪本体(2-1)的上底面及两个侧腰面设置有摄像头(2-3)。
2.根据权利要求1所述的一种工程施工探测用遥控车,其特征在于,车体(1)的底部还竖直设置有电动液压杆(1-2),所述电动液压杆(1-2)的端部转动连接有从动轮(1-3),从动轮(1-3)半径小于驱动轮(1-1),电动液压杆(1-2)与从动轮(1-3)设置在驱动轮(1-1)的一侧。
3.根据权利要求1所述的一种工程施工探测用遥控车,其特征在于,所述车体(1)内部开设有安装腔,所述安装腔与安装槽连通,安装腔内设置有驱动电机(1-4),所述驱动电机(1-4)的输出轴通过联轴器固接安装杆(2-2)。
4.根据权利要求1所述的一种工程施工探测用遥控车,其特征在于,所述扫描仪本体(2-1)与水平面平行,扫描仪本体(2-1)的上底面与安装槽的开口在同一平面,扫描仪本体(2-1)的下底长度与安装槽的直径的长度比为2:3~3:4。
5.根据权利要求4所述的一种工程施工探测用遥控车,其特征在于,所述扫描仪本体(2-1)横截面为等腰梯形,所述等腰梯形的顶角为120°~123.5°,摄像头(2-3)设置在上底面与侧腰面的中心,摄像头(2-3)的最大拍摄角度为120°,相邻两个摄像头(2-3)重合视野的角度为60°~66.5°。
6.根据权利要求5所述的一种工程施工探测用遥控车,其特征在于,上底面设置有两个光源(2-4),两个所述光源(2-4)对称设置在摄像头(2-3)两侧。
7.根据权利要求6所述的一种工程施工探测用遥控车,其特征在于,侧腰面设置有两个光源(2-4),两个所述光源(2-4)对称设置在摄像头(2-3)两侧。
8.根据权利要求6所述的一种工程施工探测用遥控车,其特征在于,所述安装槽内壁涂覆有反光层(3)。
技术总结
本技术公开一种工程施工探测用遥控车,包括有车体,车体的底部设置有四个驱动轮,每个驱动轮均连接有伺服电机,车体的前端端部设置有扫描仪组件,车体的侧面开设有半球形的安装槽,扫描仪组件设置在安装槽内,扫描仪组件包括有扫描仪本体,扫描仪本体为梯台结构,扫描仪本体的下底面固接有安装杆的一端,安装杆的另一端连接在安装槽内壁,扫描仪本体的上底面及两个侧腰面设置有摄像头。本方案把原本设置在车体外部转动头收纳入车椅,利用半球形的安装槽为扫描仪本体提供安装空间,并且还能保障扫描仪本体能够正常转动。因为扫描仪本体安装在车体空间内,所以避免扫描仪本体暴露在车体外碰触障碍物。
技术研发人员:胡佳东,孔海峡,李芹
受保护的技术使用者:陕西正创工程检测有限公司
技术研发日:20221207
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!