一种适用于消防机器人的驱动车架的制作方法
本技术涉及消防设备领域,尤其涉及一种适用于消防机器人的驱动车架。
背景技术:
1、机器人自60年代初问世以来,经历40余年的发展,己取得长足进步,社会各行各业皆可见其身影,从1986年灭火中采用了消防机器人后,消防机器人就逐渐在灭火救灾领域得到广泛的应用,消防机器人技术也得到快速的发展。现有技术中的消防机器人可以行走、喷射灭火,进行火场侦察。
2、但是,现有技术中的消防机器人通常是将消防炮安装在驱动车架上,现有的结构普遍存在体积大、重量重、越障能力差的问题。且,现有技术中的车架不具有便捷转移和趴地工作的共性,使用操作和回收均不够便捷。为了解决上述问题,适用于消防机器人的驱动车架急待研发。
技术实现思路
1、本实用新型克服了现有技术的不足,提供一种适用于消防机器人的驱动车架,还能调整驱动轮的摆动角度,便于消防机器人趴地工作,提升了消防机器人的抓地能力。
2、为达到上述目的,本实用新型采用的技术方案为:一种适用于消防机器人的驱动车架,包括车架,车架上设置有控制器,以及多个与控制器驱动连接的驱动轮,每个驱动轮通过摆动调整臂和摆动舵机与车架摆动连接,驱动轮枢转连接在摆动调整臂的一端,摆动调整臂的另一端通过摆动舵机与车架驱动连接,驱动轮能相对车架摆动回收。
3、本实用新型一个较佳实施例中,车架的下部或/和摆动调整臂上设置有抓地钉。
4、本实用新型一个较佳实施例中,车架包括至少一对相对设置的衔接梁,以及横跨连接在衔接梁上的若干根横梁;衔接梁上还设置有若干根安装梁。
5、本实用新型一个较佳实施例中,车架的一对衔接梁的四个端部分别设置有驱动安装架,每个驱动安装架上分别设置有摆动舵机,以及与摆动舵机驱动连接的摆动调整臂,驱动调整臂的摆动远端上枢转设置有驱动轮。
6、本实用新型一个较佳实施例中,驱动轮采用的是由内置驱动机构驱动的驱动轮。
7、本实用新型一个较佳实施例中,驱动轮通过摆动舵机跟随摆动调整臂相对车架摆动90°回收至车架的一侧,车架能贴合于地面,抓地钉能与地面抵触。
8、进一步的,此时,驱动轮的最下端与车架的最下端齐平,或,驱动轮的最下端高于车架的最下端。
9、本实用新型一个较佳实施例中,抓地钉设置在车架的底部,且抓地钉的尖端倾斜朝下。
10、本实用新型解决了背景技术中存在的缺陷:
11、本实用新型的一种适用于消防机器人的驱动车架,结构精简利于放置在消防车上随车进行灭火操作;还能调整驱动轮的摆动角度,便于消防机器人趴地工作,提升了消防机器人的抓地能力。
12、通过将驱动轮摆动设置在车架上,便于调整驱动轮与车架之间的相对位置,使得在灭火时,车架能贴地有效提升消防机器人的抓地能力。
13、另外在车架上设置有抓地钉,进一步提升了消防机器人的抓地能力,且在行走时,驱动轮摆动复位,抬升了车架,使得抓地钉的设置也不影响设备的转移。
技术特征:
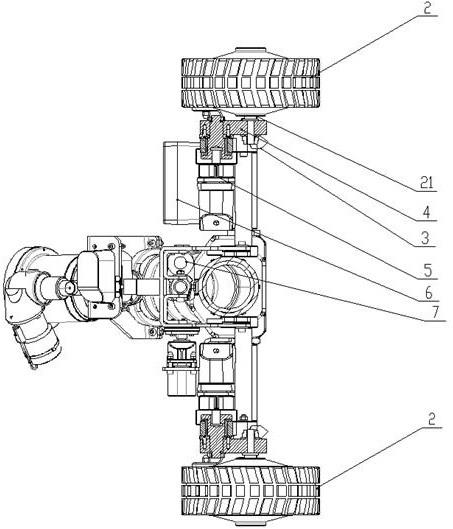
1.一种适用于消防机器人的驱动车架,包括车架(1),所述车架(1)上设置有控制器(6),以及多个与所述控制器(6)驱动连接的驱动轮(2),其特征在于:每个驱动轮(2)通过摆动调整臂(4)和摆动舵机(5)与车架(1)摆动连接,所述驱动轮(2)枢转连接在所述摆动调整臂(4)的一端,所述摆动调整臂(4)的另一端通过所述摆动舵机(5)与所述车架(1)驱动连接,所述驱动轮(2)能相对所述车架(1)摆动回收。
2.根据权利要求1所述的适用于消防机器人的驱动车架,其特征在于:所述车架(1)的下部或/和所述摆动调整臂(4)上设置有抓地钉(3)。
3.根据权利要求2所述的适用于消防机器人的驱动车架,其特征在于:所述车架(1)包括至少一对相对设置的衔接梁(12),以及横跨连接在所述衔接梁(12)上的若干根横梁(13);所述衔接梁(12)上还设置有若干根安装梁(11)。
4.根据权利要求3所述的适用于消防机器人的驱动车架,其特征在于:所述车架(1)的一对衔接梁(12)的四个端部分别设置有驱动安装架(121),每个所述驱动安装架(121)上分别设置有所述摆动舵机(5),以及与所述摆动舵机(5)驱动连接的所述摆动调整臂(4),所述摆动调整臂(4)的摆动远端上枢转设置有所述驱动轮(2)。
5.根据权利要求4所述的适用于消防机器人的驱动车架,其特征在于:所述驱动轮(2)采用的是由内置驱动机构驱动的驱动轮(2)。
6.根据权利要求5所述的适用于消防机器人的驱动车架,其特征在于:所述驱动轮(2)通过所述摆动舵机(5)跟随所述摆动调整臂(4)相对所述车架(1)摆动90°回收至所述车架(1)的一侧,所述车架(1)能贴合于地面,所述抓地钉(3)能与地面抵触。
7.根据权利要求6所述的适用于消防机器人的驱动车架,其特征在于:所述抓地钉(3)设置在车架(1)的底部,且抓地钉(3)的尖端倾斜朝下。
技术总结
本技术公开了消防设备技术领域中的一种适用于消防机器人的驱动车架,包括车架,车架上设置有控制器,以及多个与控制器驱动连接的驱动轮,每个驱动轮通过摆动调整臂和摆动舵机与车架摆动连接,驱动轮枢转连接在摆动调整臂的一端,摆动调整臂的另一端通过摆动舵机与所述车架驱动连接,驱动轮能相对车架摆动回收。本技术公开的一种适用于消防机器人的驱动车架,结构精简利于放置在消防车上随车进行灭火操作;还能调整驱动轮的摆动角度,便于消防机器人趴地工作,提升了消防机器人的抓地能力。
技术研发人员:严俊春,谭海玲,张振夫,赵浚言,沈超
受保护的技术使用者:苏州新鼎应急装备科技有限公司
技术研发日:20221215
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!