一种应对多领域复杂环境的行走轮的制作方法
本技术涉及行走轮,尤其是涉及一种应对多领域复杂环境的行走轮。
背景技术:
1、各种需要行走的装置如机器人中,行走机构对整个装置的运行稳定性乃至内部各个模块的功能发挥至关重要。行走轮由于自身的优点在各种装置中广泛应用。然而,现有行走轮的平稳性与灵活性较差,难以在多领域复杂环境中稳定行走,导致机器人等装置本身搭载的功能模块难以稳定发挥功能,不利于装置在多领域复杂环境中运行。
技术实现思路
1、针对现有技术存在的问题,本实用新型提供一种应对多领域复杂环境的行走轮,能够在多领域复杂环境中稳定灵活行进、越障,提高行走轮应对多领域复杂环境的机动性及工作的安全性与效率。
2、本实用新型的技术方案为:
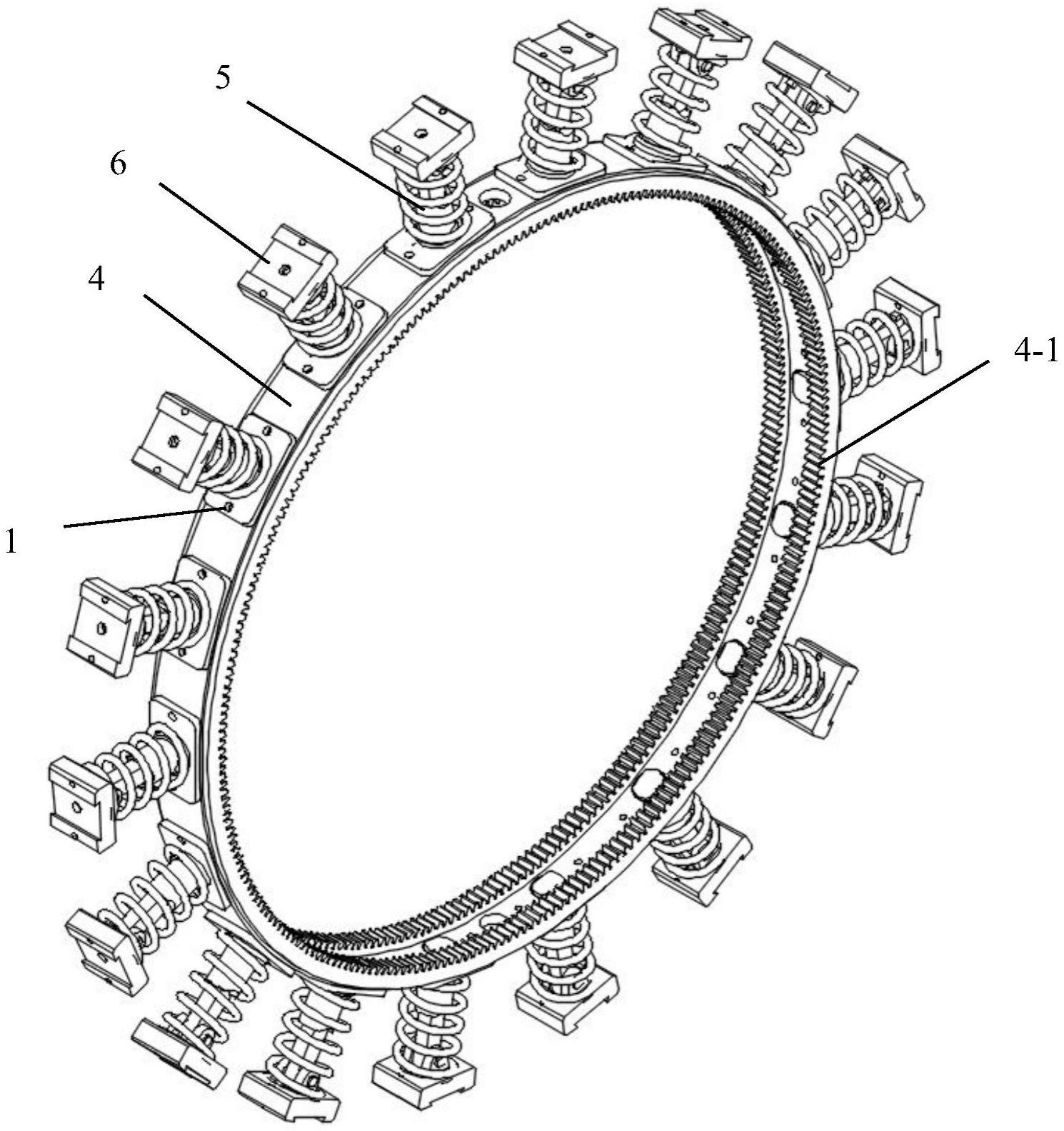
3、一种应对多领域复杂环境的行走轮,包括支撑环4,所述支撑环4的外侧壁沿周向均匀设置有多个支撑腿5,所述支撑腿5的尾端设置有支撑脚6。
4、进一步的,所述支撑环4的内侧壁开设有内轮齿4-1。
5、进一步的,所述内轮齿4-1有至少两圈,每两圈内轮齿4-1相互平行。
6、进一步的,所述支撑环4的外侧壁沿周向均匀开设有多个支撑腿安装孔4-2;所述支撑腿5包括套筒5-1、伸缩杆5-2、弹簧5-3;所述套筒5-1从尾端到首端依次包括第一轴段、安装板、第二轴段,所述安装板的宽度大于所述支撑腿安装孔4-2的内径且大于所述第一轴段的直径,所述第二轴段设置在所述支撑腿安装孔4-2内,所述安装板与所述支撑环4之间固定连接;所述套筒5-1内开设有与所述套筒5-1共轴的伸缩杆安装孔,所述伸缩杆5-2从尾端到首端依次包括第三轴段、直径大于伸缩杆安装孔内径的第四轴段,所述第三轴段从所述支撑环4的内侧穿入所述伸缩杆安装孔并伸出所述伸缩杆安装孔;所述支撑脚6在首端端面设置有两个相互平行的安装边6-1,所述第三轴段的尾端伸入两个所述安装边6-1之间,所述第三轴段与两个所述安装边6-1之间通过销轴5-4转动连接;所述弹簧5-3套设在所述第一轴段上并在两端分别抵靠在所述安装板的尾端端面与所述支撑脚6的首端端面。
7、进一步的,所述第三轴段为圆轴沿轴线对称切去两侧整段d型轴后剩余的轴或一侧切去整段d型轴、另一侧切去部分段d型轴后剩余的轴。
8、进一步的,所述支撑脚6为扁平板状或球状或弧形板状或船桨板状。
9、本实用新型的有益效果为:
10、(1)本实用新型通过在支撑环的周向均匀设置支撑腿与支撑脚形成行走轮,能够承载带行走轮装置的自重及各方向外来的压力,使得装置整体稳定、行进、翻越、停止,两个一组应用时在面临任何复杂环境和突发外来冲击时仍旧能够保持或迅速恢复物理站立姿态,不影响所搭载的功能模块完成既定任务,提高了行走轮应对多领域复杂环境的机动性及工作的安全性与效率。
11、(2)本实用新型通过在行走轮中支撑环的内侧壁开设内轮齿,使得行走轮能够配置相应的外齿轮而实现动力向行走轮的稳定传递,配置的外齿轮还能够对行走轮进行稳定支撑,提高行走轮运行的稳定性。此外,本实用新型可根据需求设置支撑环内侧壁内轮齿的圈数,配置带对应圈数外轮齿的外齿轮,能够进一步提升动力传递的稳定性及对行走轮支撑的稳定性,大大提高行走轮运行的稳定性。
12、(3)本实用新型通过在行走轮中设置与支撑环固连的套筒、从支撑环内侧伸入套筒内且在尾端与支撑脚转动连接的伸缩杆、套设在套筒上安装板与支撑脚之间的弹簧,形成可伸缩的支撑腿、可相对支撑腿转动的支撑脚,能够提升行走轮行走过程中的平稳性与灵活性,而且本实用新型针对不同领域复杂环境设计支撑脚的形状为扁平板状或球状或弧形板状或船桨板状,使得行走轮能够在楼梯、沙地、水下等多领域复杂环境中稳定行走,提高行走轮应对多领域复杂环境的能力。
技术特征:
1.一种应对多领域复杂环境的行走轮,其特征在于,包括支撑环(4),所述支撑环(4)的外侧壁沿周向均匀设置有多个支撑腿(5),所述支撑腿(5)的尾端设置有支撑脚(6);
2.根据权利要求1所述的应对多领域复杂环境的行走轮,其特征在于,所述支撑环(4)的内侧壁开设有内轮齿(4-1)。
3.根据权利要求2所述的应对多领域复杂环境的行走轮,其特征在于,所述内轮齿(4-1)有至少两圈,每两圈内轮齿(4-1)相互平行。
4.根据权利要求1所述的应对多领域复杂环境的行走轮,其特征在于,所述第三轴段为圆轴沿轴线对称切去两侧整段d型轴后剩余的轴或一侧切去整段d型轴、另一侧切去部分段d型轴后剩余的轴。
5.根据权利要求1所述的应对多领域复杂环境的行走轮,其特征在于,所述支撑脚(6)为扁平板状或球状或弧形板状或船桨板状。
技术总结
本技术涉及行走轮技术领域,提供一种应对多领域复杂环境的行走轮,包括支撑环,支撑环的外侧壁沿周向均匀设有多个支撑腿,支撑腿的尾端设有支撑脚。支撑环的内侧壁开设有内轮齿。内轮齿有至少两圈,每两圈内轮齿相互平行。支撑环的外侧壁沿周向均匀开设有多个支撑腿安装孔;支撑腿包括套筒、伸缩杆、弹簧;套筒包括第一轴段、安装板、第二轴段,安装板与支撑环固连;伸缩杆包括第三、第四轴段,第三轴段从支撑环内侧穿过套筒上的伸缩杆安装孔;第三轴段与支撑脚间通过销轴转动连接;弹簧套设在第一轴段上安装板与支撑脚间。本技术能够在多领域复杂环境中稳定灵活行进、越障,提高行走轮应对多领域复杂环境的机动性及工作的安全性与效率。
技术研发人员:陈洪,李龙,李伟,曾欢
受保护的技术使用者:陈洪
技术研发日:20221221
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!