一种爬杆机器人的制作方法
本技术涉及爬杆机器人设备,具体涉及一种爬杆机器人。
背景技术:
1、现在针对电缆的破损进行检修已逐步使用爬杆机器人来取代人为爬杆检测,目前大多数的爬杆机器人通常是使用半包围式夹抱的方式来实现对电杆的夹持,并在夹板内侧设置轮式结构,这种夹抱方式尽管可以实现机器人与电杆的配合,但是存在机器人主体部位位于电杆的外侧,导致夹臂尤其是轮式部位受力过大,导致轮式结构以及夹臂很容易发生损坏,机器人的上升爬行过程中稳定性能较差。
技术实现思路
1、有鉴于此,本实用新型提供一种爬杆机器人,可以通过环抱式爬行单元实现对各种尺寸电线杆的环抱式夹持,避免轮式结构或夹臂的损坏,使爬杆机器人的爬行更加稳定。
2、为解决上述技术问题,本实用新型提供一种爬杆机器人,包括用于在电杆上进行上下攀爬的爬行单元、设置在爬行单元上的用于对线路情况进行监控的视频系统和用于对爬行单元的动作进行控制的控制单元,
3、控制单元和视频系统信号连接,用于控制视频系统的开启与关闭以及视频影像的拍摄与传输;
4、控制单元和爬行单元信号连接,用于控制爬行系统的上升与下降;
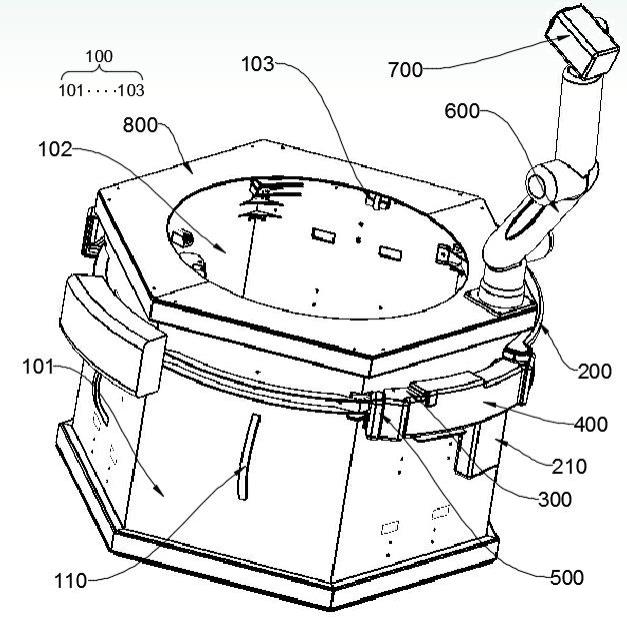
5、爬行单元包括壳体,壳体为铰接设置的可以开合的环形结构,壳体的内部设置有固定套,固定套为开合式环形气囊套,固定套上设置有充气口和放气口,固定套的内侧壁上下两侧均布设置有多个轮毂电机,轮毂电机与控制单元信号连接。
6、本实用新型通过在固定套内充放气体可以实现对固定套的直径进行改变,进而实现对不同直径的电线杆的夹抱工作,便于适应不同直径的电杆的环抱工作,避免轮式结构或夹臂的损坏,使爬杆机器人的爬行更加稳定,控制单元可以发出控制指令信号,配合轮毂电机的转动实现爬行单元的爬升工作,然后控制单元可以控制视频系统开启,视频系统会将电杆顶部的线缆的实物影响进行拍摄,传输给控制单元,便于维修人员及时掌握线缆的状况,不需要人工攀爬进行寻找问题线缆,大大降低了维修人员的工作难度。
7、壳体的外侧壁上设置有铁道,铁道上设置有旋转片,旋转片的中部铰接设置在铁道上,旋转片的一端铰接设置有旋转罩,旋转片的另一端铰接设置有控制旋转罩进行转动的舵机,通过舵机的输出轴的转动可以带动旋转片和旋转罩一起进行转动,进而实现旋转罩的开合与关闭,实现了轻松将壳体打开,从电杆上拆下或装入电杆上,更加方便。
8、视频系统包括壳体的上部设置有机械臂,机械臂上设置有摄像头,机械臂与摄像头均与控制单元信号连接,机械臂可以带动摄像头进行360度旋转,并且可以进行空间位置的转动,便于实现对各个角度的电缆的实际情况进行拍摄取证。
9、壳体的上下两侧的外侧壁上分别设置有遮挡盖,遮挡盖应选择具有一定抗压耐磨且具有一定延展性能的橡胶材质,这样的目的是保证了与电杆外侧壁的紧密贴合,避免落叶或其他杂质落进壳体的内部。
10、壳体上设置有线槽,线槽的一端设置在壳体的内部,线槽的另一端设置有壳体的外侧,线槽便于电控线缆的穿入,可以对电控线缆进行导向和防护。
11、壳体的竖直部外侧壁上设置有把手,把手便于使用者抓取,实现爬行组件的拆卸与组装,方便搬运。
12、旋转罩的下部设置有交换机,交换机和控制单元信号连接,交换机用于和控制单元之间进行信号的传输及处理,并对视频系统的图像信号进行接收和反馈。
13、控制单元包括手提箱,手提箱的内部放置有用于对爬行单元和视频系统进行控制的控制器,手提箱便于对控制器进行放置和保护,控制器可以选用plc控制器或单片机。
14、综上所述,与现有技术相比,本申请包括以下至少一种有益技术效果:
15、1、通过舵机的输出轴的转动,可以带动旋转片进行转动,旋转片的转动会带动旋转罩进行转动,进而实现了旋转罩对壳体的关闭与打开,方便将爬行组件套设在电杆上或者从电杆上取下,更加方便。
16、2、控制单元对爬行单元以及视频系统的工作进行控制,大大简化了维修人员的检修过程,不需要维修人员爬到电杆顶部进行现场检查问题电缆,直接预先使用爬行机器人进行问题电缆的查找,更加方便安全,大大提高了维修人员的工作效率。
17、3、机械臂可以带动摄像头进行多角度的空间旋转,实现了对各个视角的电缆进行充分的拍照取证,更加方便快速。
18、4、固定套可以通过充放气来实现对壳体的内径进行间接调整,便于实现针对不同直径的电杆进行攀爬工作,适用性更强。
技术特征:
1.一种爬杆机器人,包括用于在电杆上进行上下攀爬的爬行单元(100)、设置在爬行单元(100)上的用于对线路情况进行监控的视频系统和用于对爬行单元(100)的动作进行控制的控制单元,其特征在于:
2.如权利要求1所述的爬杆机器人,其特征在于:所述壳体(101)的外侧壁上设置有铁道(200),所述铁道(200)上设置有旋转片(300),所述旋转片(300)的中部铰接设置在铁道(200)上,所述旋转片(300)的一端铰接设置有旋转罩(400),所述旋转片(300)的另一端铰接设置有控制旋转罩(400)进行转动的舵机(500)。
3.如权利要求2所述的爬杆机器人,其特征在于:所述视频系统包括壳体(101)的上部设置有机械臂(600),所述机械臂(600)上设置有摄像头(700),所述机械臂(600)与摄像头(700)均与控制单元信号连接。
4.如权利要求2所述的爬杆机器人,其特征在于:所述壳体(101)的上下两侧的外侧壁上分别设置有遮挡盖(800)。
5.如权利要求4所述的爬杆机器人,其特征在于:所述壳体(101)上设置有线槽(900),所述线槽(900)的一端设置在壳体(101)的内部,所述线槽(900)的另一端设置有壳体(101)的外侧。
6.如权利要求5所述的爬杆机器人,其特征在于:所述壳体(101)的竖直部外侧壁上设置有把手(110)。
7.如权利要求3所述的爬杆机器人,其特征在于:所述旋转罩(400)的下部设置有交换机(210),所述交换机(210)和控制单元信号连接。
8.如权利要求1所述的爬杆机器人,其特征在于:所述控制单元包括手提箱,所述手提箱的内部放置有用于对爬行单元(100)和视频系统进行控制的控制器。
技术总结
本技术提供一种爬杆机器人,包括爬行单元、视频系统和用于对控制单元,所述控制单元和视频系统信号连接,用于控制视频系统的开启与关闭以及视频影像的拍摄与传输;所述控制单元和爬行单元信号连接,用于控制爬行系统的上升与下降;所述爬行单元包括壳体,所述壳体为铰接设置的可以开合的环形结构,所述壳体的内部设置有固定套,所述固定套为开合式环形气囊套,所述固定套上设置有充气口和放气口,所述固定套的内侧壁上下两侧均布设置有多个轮毂电机,所述轮毂电机与控制单元信号连接。本技术可以通过环抱式爬行单元实现对各种尺寸电线杆的环抱式夹持,避免轮式结构或夹臂的损坏,使爬杆机器人的爬行更加稳定。
技术研发人员:王舒平
受保护的技术使用者:王舒平
技术研发日:20221223
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!