线控转向控制装置和线控转向控制方法与流程
本发明涉及搭载在汽车上的作为转向控制装置的线控转向控制装置。
背景技术:
1、在汽车(以下记载为“车辆”)的转向操纵控制装置中,已知有一种与方向盘连结的转向轴与转向操纵机构机械分离的、所谓的线控转向方式的转向操纵控制装置。作为线控转向方式的转向操纵控制装置的线控转向控制装置,检测转向轴的转动角和转动方向等,并基于这些检测信号控制转向操纵用电动致动器的动作量来驱动转向操纵轴。
2、在线控转向方式中,因为能够不受机械制约地设定方向盘的操作量与转向操纵用电动致动器的转向操纵量的对应关系,所以线控转向控制装置具有能够灵活地应对车辆的速度的高低、转弯半径的长短和车辆的加减速的有无等与车辆的行驶状态相应的转向操纵特性的改变,设计自由度提高的优点。进而,线控转向控制装置具有容易向以车道保持控制为首的自动转向操纵系统发展的优点等比以往的转向操纵控制装置多的优点。
3、在与转向操纵机构分离的转向轴安装有用于对方向盘施加转向操纵反作用力扭矩(扭矩也称为转矩)的反作用力用电动致动器。通过对方向盘施加适度的转向操纵反作用力扭矩,车辆的驾驶员能够具有方向盘与转向操纵机构机械连结着这样的感觉地进行转向操作。
4、在具有这种转向操纵控制装置的车辆中,设想转向操纵控制装置在驾驶时切换自动转向操纵模式(以下也记载为“主动转向模式”、“自动驾驶模式”)和手动转向操纵模式(以下也记载为“手动转向模式”、“手动驾驶模式”)。而且,一般而言,例如,转向操纵控制装置具有:在驾驶员握持方向盘时执行手动转向模式、在驾驶员未握持方向盘时执行主动转向模式的结构。
5、在执行主动转向模式时,转向操纵控制装置基于来自自动转向操纵系统的外部转向操纵指令值求取转向操纵轮(转向轮)的转向操纵角,控制转向操纵用电动致动器而驱动转向操纵轮,以使得成为所求得的转向操纵角。在此情况下,方向盘因反作用力用电动致动器而与转向操纵轮的转向操纵角对应地旋转,使方向盘的旋转角与转向操纵轮的转向操纵角一致。
6、此外,作为自动转向操纵系统的自动转向操纵控制,有以使得不脱离铺设在道路上的白线的方式行驶的车道保持控制、沿着行驶路线行驶的自动驾驶控制等。自动转向操纵系统在自动转向操纵控制的执行期间判断为难以继续进行自动转向操纵控制的情况下,能够将驾驶权限移交给驾驶员。另外,在执行着主动转向模式时,在驾驶员因某种意图为了取消自动转向操纵控制而操纵方向盘时,系统也需要迅速检测到此情况,并将驾驶权限移交给驾驶员。
7、在这些情况下,自动转向操纵系统在确认到驾驶员握持或操纵方向盘时,需要将驾驶权限移交给驾驶员。因此,在转向操纵控制装置中,检测驾驶员握持方向盘(握持检测)和检测驾驶员操纵方向盘(操纵检测)是重要的技术问题。
8、关于以上说明了的握持检测和操纵检测,已知有一种推算驾驶员施加了的扭矩(以下记载为“驾驶员扭矩”),并根据推算出的驾驶员扭矩的值检测驾驶员的握持和操纵的方法。驾驶员扭矩的推算中使用方向盘的惯性力矩。方向盘的惯性力矩是与驾驶员扭矩的推算精度直接关联的重要参数,是影响方向盘的举动的控制参数。这样的方向盘的控制参数除了惯性力矩以外,还包括摩擦扭矩和重力扭矩等。
9、这样的推算安装在致动器上的负荷的惯性力矩的技术问题,是不限定于线控转向控制装置的通常的技术问题。用于推算安装在致动器上的负荷的惯性力矩的现有技术例如记载在专利文献1中。在专利文献1记载的技术中,在利用电机的力和人的力移动的助力型的移动体中,通过使用加速度检测部检测到的移动体的加速度和电流传感器检测到的电机的电枢电流推算移动体的等效惯性力矩,推算安装在电机上的负荷(台车等移动体)的惯性力矩。
10、现有技术文献
11、专利文献
12、专利文献1:日本特开2005-153648号公报
技术实现思路
1、发明要解决的技术问题
2、专利文献1记载的技术未考虑到驾驶员握持方向盘的情况,如果将专利文献1记载的技术用于转向操纵控制装置,则在驾驶员握持方向盘的情况下,有可能不能高精度地推算方向盘的惯性力矩。
3、另外,在推算方向盘的惯性力矩时,需要通过电机的扭矩使方向盘动作。此时,如果方向盘独立于驾驶员的意图而大幅度动作,则担心驾驶员会有不安感、不适感。
4、因此,期待一种能够利用不易给车辆的驾驶员带来不安感、不适感的方法高精度地推算惯性力矩等方向盘的控制参数的线控转向控制装置、线控转向方式的控制方法(线控转向控制方法)。
5、本发明的目的在于,提供能够利用不易给车辆的驾驶员带来不安感、不适感的方法,高精度地推算方向盘的控制参数的线控转向控制装置和线控转向控制方法。
6、用于解决技术问题的技术方案
7、本发明的线控转向控制装置包括:使车辆的方向盘动作的第一电机;控制所述车辆的车轮的转向动作(即,转向操纵动作)的第二电机;控制所述第一电机和所述第二电机的控制装置。所述控制装置在所述车辆转移至自动驾驶模式前,通过所述第一电机在所述第一电机的旋转方向的正转方向和反转方向这两个方向对所述方向盘施加预先决定的输入扭矩。所述控制装置获取关于施加所述输入扭矩而得到的所述方向盘的举动(即,行为)的信息即举动信息。所述控制装置基于所述举动信息,判断是否转移至推算所述方向盘的控制参数的控制参数推算模式。所述举动信息中包括所述方向盘的旋转角的值和对所述旋转角进行时间微分而得到的值中的至少一者。
8、本发明的线控转向控制方法由控制装置执行,所述控制装置控制使车辆的方向盘动作的第一电机和控制所述车辆的车轮的转向动作(转向操纵动作)的第二电机,所述线控转向控制方法包括:在所述车辆转移至自动驾驶模式前,通过所述第一电机在所述第一电机的旋转方向的正转方向和反转方向这两个方向对所述方向盘施加预先决定的输入扭矩的步骤;获取关于施加所述输入扭矩而得到的所述方向盘的举动的信息即举动信息的步骤;和基于所述举动信息,判断是否转移至推算所述方向盘的控制参数的控制参数推算模式的步骤。所述举动信息中包括所述方向盘的旋转角的值和对所述旋转角进行时间微分而得到的值中的至少一者。
9、发明的效果
10、根据本发明,能够提供能够利用不易给车辆的驾驶员带来不安感、不适感的方法,高精度地推算方向盘的控制参数的线控转向控制装置和线控转向控制方法。
技术特征:
1.一种线控转向控制装置,其特征在于,包括:
2.根据权利要求1所述的线控转向控制装置,其特征在于:
3.根据权利要求1所述的线控转向控制装置,其特征在于:
4.根据权利要求1所述的线控转向控制装置,其特征在于:
5.根据权利要求1所述的线控转向控制装置,其特征在于:
6.根据权利要求5所述的线控转向控制装置,其特征在于:
7.根据权利要求5所述的线控转向控制装置,其特征在于:
8.根据权利要求7所述的线控转向控制装置,其特征在于:
9.根据权利要求8所述的线控转向控制装置,其特征在于:
10.根据权利要求5所述的线控转向控制装置,其特征在于:
11.一种线控转向控制方法,其特征在于:
技术总结
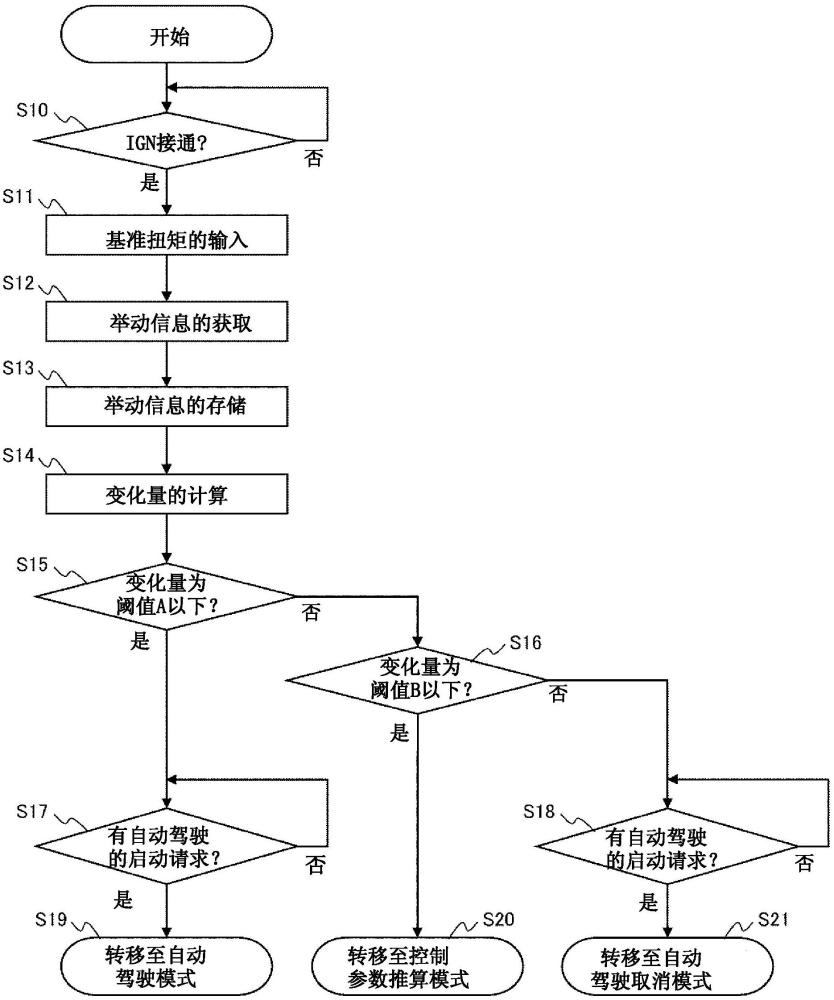
本发明的线控转向控制装置包括控制装置(19),该控制装置(19)控制使车辆的方向盘(12)动作的第一电机(18)和控制车轮的转向动作的第二电机(35)。控制装置(19)在车辆转移至自动驾驶模式前,通过第一电机(18)对在第一电机(18)的旋转方向的正转方向和反转方向方向盘(12)施加输入扭矩(S11),获取施加输入扭矩而得到的方向盘(12)的举动信息(S12),基于举动信息判断是否推算方向盘(12)的控制参数(S15~S16)。举动信息中包括方向盘的旋转角的值和对旋转角进行时间微分而得到的值中的至少一者。
技术研发人员:有富俊亮,横田忠治,中岫泰仁,平田敦士,伊藤贵广,前田健太
受保护的技术使用者:日立安斯泰莫株式会社
技术研发日:
技术公布日:2024/2/19
- 还没有人留言评论。精彩留言会获得点赞!