一种六足仿生蜘蛛机器人
本发明属于仿生机器,尤其是涉及一种六足仿生蜘蛛机器人。
背景技术:
1、随着全球环境与发展战略——“可持续发展战略”的提出,这已成为当今乃至未来设计必须遵循的规律。在这一原则下,出现了一些新型的设计思想和风格,如绿色设计、生态设计、循环设计、组合设计等。随着人类对设计的认识和探索的加深,人类实现绿色设计和生态设计的方式将不断涌现,仿生设计就是其中之一,其中仿照蜘蛛的六足仿生蜘蛛机器人因通行率高,适应地形能力强在生产、救灾和军事中有广泛的运用。
2、目前六足仿生蜘蛛机器人的动力来源主要是自身携带的蓄电池,若蓄电池电力消耗完毕需要重新充电,导致六足仿生蜘蛛机器人使用持续性受到蓄电池电量储备影响,而且蓄电池在夜间或者冬季寒冷天气中续航能力会大打折扣,影响六足仿生蜘蛛机器人使用的效果,同时六足仿生蜘蛛机器人的接地面积小,在岩石表面攀爬时容易滑落,影响六足仿生蜘蛛机器人通行的可靠性。
3、为此,我们提出一种六足仿生蜘蛛机器人来解决上述问题。
技术实现思路
1、本发明的目的是针对上述问题,提供一种六足仿生蜘蛛机器人。
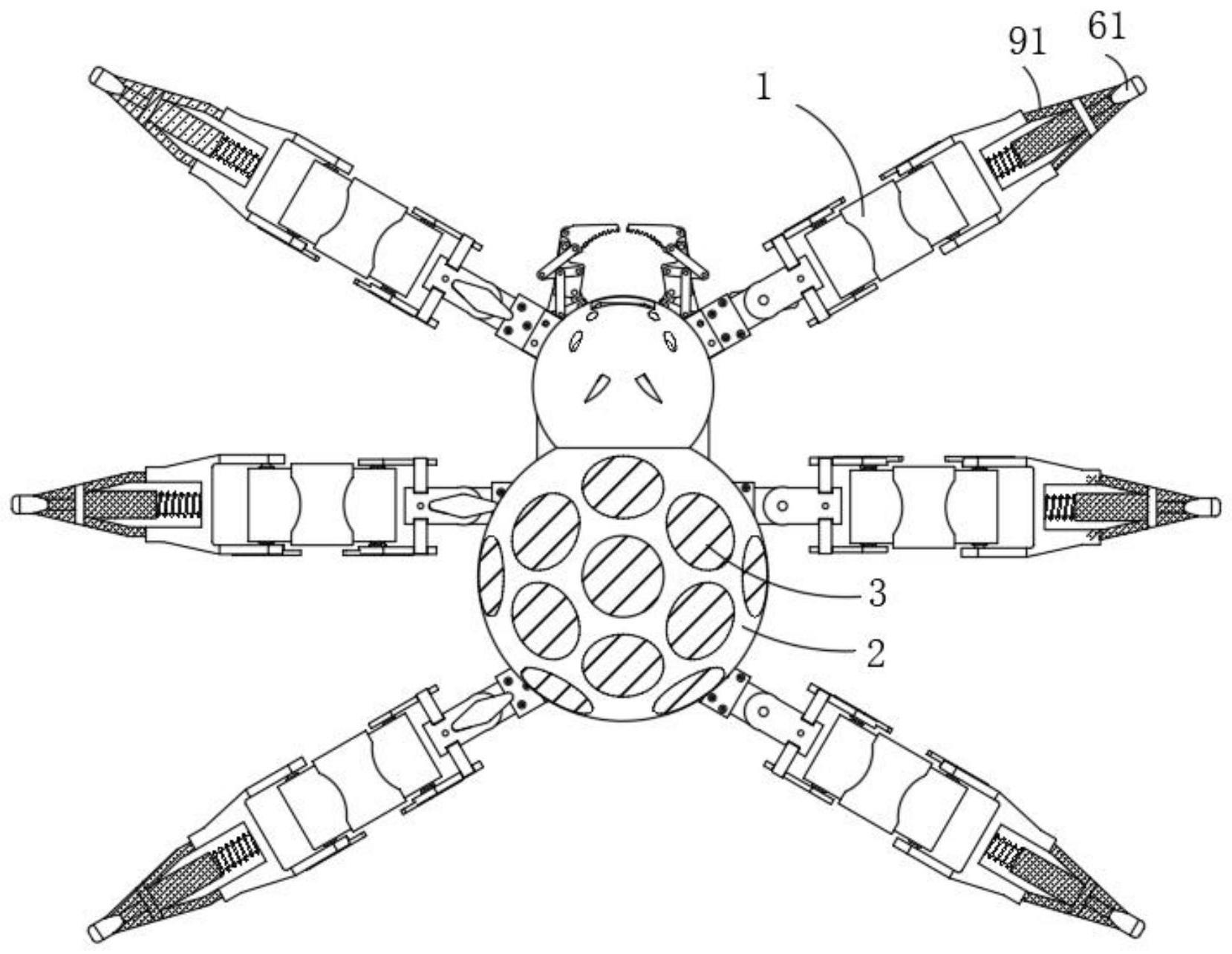
2、为达到上述目的,本发明采用了下列技术方案:一种六足仿生蜘蛛机器人,包括六足仿生蜘蛛机器主体,所述六足仿生蜘蛛机器主体的顶端固定连接有外罩,所述外罩的外壁开设有多个安装孔,且安装孔的孔壁固定连接有太阳能电池板组件,所述外罩的内壁固定连接有隔板,所述隔板的上表面固定连接有蓄电池组件和充放电组件,所述蓄电池组件的外壁固定套接有隔热棉罩,所述隔热棉罩的外壁固定连接有外壳,所述隔板的上表面固定连接有温度调节机构,所述蓄电池组件的上表面固定连接有控制机构,所述六足仿生蜘蛛机器主体的六足侧端均连接有稳定机构。
3、在上述的一种六足仿生蜘蛛机器人中,所述温度调节机构包括与隔板上表面固定连接的安装环,所述安装环的内壁固定连接有微型抽气泵,所述微型抽气泵的吸入端固定连通有弯管,所述弯管的吸入端固定连通有吸气筒,所述外罩的外壁开设有吸气筒相配合的通孔,所述微型抽气泵的输出端固定连通有软管,所述软管的输出端与外壳的外壁固定连通,所述外罩的外壁开设有安装孔,且安装孔的孔壁固定连接有排气单向阀。
4、在上述的一种六足仿生蜘蛛机器人中,所述吸气筒的内壁固定连接有海绵支撑块,所述海绵支撑块的外壁固定连接有防水透气膜片,所述防水透气膜片的外壁与吸取筒的内壁固定连接。
5、在上述的一种六足仿生蜘蛛机器人中,所述稳定机构包括与六足仿生蜘蛛机器主体六足外壁滑动连接的连接架,所述六足仿生蜘蛛机器主体的六足外壁开设有与连接架连接端相配合的滑槽,所述连接架的内壁连接筒内壁活动连接有限位杆,所述限位杆的侧端与六足仿生蜘蛛机器主体的六足外壁固定连接,所述限位杆的杆壁活动套接有弹簧,所述弹簧的两端分别与六足仿生蜘蛛机器主体的六足外壁和连接架的外壁固定连接,所述连接架的接地端固定连接有辅助机构。
6、在上述的一种六足仿生蜘蛛机器人中,所述辅助机构包括与连接架侧端固定连接的接地筒,所述接地筒的下表面固定连接有橡胶罩,所述橡胶罩的外壁固定连接有耐磨布层,所述接地筒的下表面固定连接有多个斜橡胶块,所述斜橡胶块的外壁固定连接有支撑片。
7、在上述的一种六足仿生蜘蛛机器人中,所述耐磨布层的外壁固定连接有多个橡胶防滑凸块。
8、在上述的一种六足仿生蜘蛛机器人中,所述接地筒和橡胶罩的内部共同填充有形变液层。
9、在上述的一种六足仿生蜘蛛机器人中,所述控制机构包括与蓄电池组件上表面固定连接的导热绝缘空心块,所述导热绝缘空心块的内壁固定连接有导电块,所述导热绝缘空心块的内部填充有导电膨胀液层。
10、与现有的技术相比,一种六足仿生蜘蛛机器人的优点在于:
11、1、通过设置的温度调节机构、控制机构、太阳能电池板和充放电组件,当六足仿生蜘蛛机器人白天使用过程中,通过太阳能电池板组件吸收光能转换成电能,电能通过充放电组件输送到蓄电池组件内储存,提高蓄电池组件的电力储备,增加六足仿生蜘蛛机器人的续航时间,若蓄电池组件在夜间或者冬季使用的时候,蓄电池组件工作的发热过程中隔热棉罩阻碍散热,使热量存蓄在蓄电池组件周边,避免低温导致蓄电池组件的续航能力被大幅度降低,在蓄电池组件使用过程中发热严重时,控制机构的导电膨胀液层膨胀,并使导电膨胀液层与导电块接触,之后使微型抽气泵启动,并通过弯管和吸气筒抽吸外界空气,同时空气通过软管输送到外壳内,空气通过隔热棉罩的气孔排出,空气携带热量从单向排气阀排出,实现蓄电池组件快速降温,避免高温使蓄电池组件损坏,该机构使六足仿生蜘蛛机器人具有太阳能补充蓄电池电力的能力,提高六足仿生蜘蛛机器人的续航时间,而且蓄电池组件具有温度调控的功能,避免高温和低温对蓄电池电力供应的影响,保证蓄电池工作的安全性,能够有效提高六足仿生蜘蛛机器人使用的效果和持续性。
12、2、通过设置的设置的辅助机构和稳定机构,当六足仿生蜘蛛机器人使用的时候,连接架通过弹簧的弹力能够缓冲接触的冲击力,对六足仿生蜘蛛机器人内部电子设备进行缓冲保护,而且接地筒内形变液层会随着橡胶罩和耐磨布层沿着地面形变,同时斜橡胶块上的支撑片外扩,扩大接地筒底部的接地面积,而且配合橡胶防滑凸块增加六足仿生蜘蛛机器人六足与地面的摩擦力,进而保证六足仿生蜘蛛机器人通行时不会发生滑移的情况,该机构使六足仿生蜘蛛机器人的接地处具有形变的能力,扩大与地面的接触面积,并提高六足仿生蜘蛛机器人通行的稳定性,能够有效提高六足仿生蜘蛛机器人使用的可靠性。
技术特征:
1.一种六足仿生蜘蛛机器人,包括六足仿生蜘蛛机器主体(1),其特征在于,所述六足仿生蜘蛛机器主体(1)的顶端固定连接有外罩(2),所述外罩(2)的外壁开设有多个安装孔,且安装孔的孔壁固定连接有太阳能电池板组件(3),所述外罩(2)的内壁固定连接有隔板(4),所述隔板(4)的上表面固定连接有蓄电池组件(5)和充放电组件(12),所述蓄电池组件(5)的外壁固定套接有隔热棉罩(10),所述隔热棉罩(10)的外壁固定连接有外壳(11),所述隔板(4)的上表面固定连接有温度调节机构(7),所述蓄电池组件(5)的上表面固定连接有控制机构(8),所述六足仿生蜘蛛机器主体(1)的六足侧端均连接有稳定机构(9)。
2.根据权利要求1所述的一种六足仿生蜘蛛机器人,其特征在于,所述温度调节机构(7)包括与隔板(4)上表面固定连接的安装环(71),所述安装环(71)的内壁固定连接有微型抽气泵(72),所述微型抽气泵(72)的吸入端固定连通有弯管(73),所述弯管(73)的吸入端固定连通有吸气筒(74),所述外罩(2)的外壁开设有吸气筒(74)相配合的通孔,所述微型抽气泵(72)的输出端固定连通有软管(75),所述软管(75)的输出端与外壳(11)的外壁固定连通,所述外罩(2)的外壁开设有安装孔,且安装孔的孔壁固定连接有排气单向阀(76)。
3.根据权利要求2所述的一种六足仿生蜘蛛机器人,其特征在于,所述吸气筒(74)的内壁固定连接有海绵支撑块(13),所述海绵支撑块(13)的外壁固定连接有防水透气膜片(14),所述防水透气膜片(14)的外壁与吸取筒的内壁固定连接。
4.根据权利要求1所述的一种六足仿生蜘蛛机器人,其特征在于,所述稳定机构(9)包括与六足仿生蜘蛛机器主体(1)六足外壁滑动连接的连接架(91),所述六足仿生蜘蛛机器主体(1)的六足外壁开设有与连接架(91)连接端相配合的滑槽,所述连接架(91)的内壁连接筒内壁活动连接有限位杆(92),所述限位杆(92)的侧端与六足仿生蜘蛛机器主体(1)的六足外壁固定连接,所述限位杆(92)的杆壁活动套接有弹簧(93),所述弹簧(93)的两端分别与六足仿生蜘蛛机器主体(1)的六足外壁和连接架(91)的外壁固定连接,所述连接架(91)的接地端固定连接有辅助机构(6)。
5.根据权利要求4所述的一种六足仿生蜘蛛机器人,其特征在于,所述辅助机构(6)包括与连接架(91)侧端固定连接的接地筒(61),所述接地筒(61)的下表面固定连接有橡胶罩(62),所述橡胶罩(62)的外壁固定连接有耐磨布层(63),所述接地筒(61)的下表面固定连接有多个斜橡胶块(64),所述斜橡胶块(64)的外壁固定连接有支撑片(65)。
6.根据权利要求5所述的一种六足仿生蜘蛛机器人,其特征在于,所述耐磨布层(63)的外壁固定连接有多个橡胶防滑凸块(15)。
7.根据权利要求5所述的一种六足仿生蜘蛛机器人,其特征在于,所述接地筒(61)和橡胶罩(62)的内部共同填充有形变液层(16)。
8.根据权利要求1所述的一种六足仿生蜘蛛机器人,其特征在于,所述控制机构(8)包括与蓄电池组件(5)上表面固定连接的导热绝缘空心块(81),所述导热绝缘空心块(81)的内壁固定连接有导电块(82),所述导热绝缘空心块(81)的内部填充有导电膨胀液层(83)。
技术总结
本发明属于仿生机器技术领域,尤其是涉及一种六足仿生蜘蛛机器人,包括六足仿生蜘蛛机器主体,所述六足仿生蜘蛛机器主体的顶端固定连接有外罩,所述外罩的外壁开设有多个安装孔,且安装孔的孔壁固定连接有太阳能电池板组件。本发明使六足仿生蜘蛛机器人具有太阳能补充蓄电池电力的能力,提高六足仿生蜘蛛机器人的续航时间,而且蓄电池组件具有温度调控的功能,避免高温和低温对蓄电池电力供应的影响,保证蓄电池工作的安全性和持续性,而且六足仿生蜘蛛机器人的接地处还具有形变的能力,扩大与地面的接触面积,并提高六足仿生蜘蛛机器人通行的稳定性,进而能够有效提高六足仿生蜘蛛机器人使用的效果和可靠性。
技术研发人员:何世奇,韩珊珊,郭莉清,黎子昱
受保护的技术使用者:江西应用科技学院
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!