一种位姿补偿可重构连杆装置
本发明涉及一种位姿补偿可重构连杆装置,具体的讲是一种连接可重构杆件与行走机构的锥齿轮传动装置,可实现对可重构杆件横滚角的补偿,行走机构不随可重构杆件发生横滚,可应用于具有可重构躯干的多足仿生机器人中。
背景技术:
1、具有可重构躯干的多足仿生机器人,在躯干变形时,行走机构会随与之固定连接的躯干杆件横滚,当行走机构为开链结构,需通过控制行走机构的驱动电机维持平稳;当行走机构为少自由度闭链结构,机器人易发生失稳。中国专利cn212738352u公开了“一种变胞六足机器人”,它提出一种变胞六足机器人,包括闭链结构的机身以及多组与机身铰接连接的行走机构,通过变胞机构在运动过程中改变机构构态的自由度,实现多足仿生机器人机身的改变。本专利采用锥齿轮传动位姿补偿设计,提高了具有可重构躯干的多足仿生机器人在躯干变形过程中的行走稳定性,降低控制复杂度。
技术实现思路
1、本发明要解决的问题是提供一种位姿补偿可重构连杆装置,应用于具有可重构躯干的多足仿生机器人中,补偿机器人躯干变形过程中可重构杆件产生的横滚角,保障行走机构稳定支撑,且不增加额外驱动和控制复杂度。
2、本发明的技术方案:
3、一种位姿补偿可重构连杆装置由可重构连杆和位姿补偿组件组成,可重构连杆通过零件轴孔配合与位姿补偿组件中锥齿轮组壳体紧固连接,且可重构连杆可发生横滚。
4、所述的位姿补偿可重构连杆装置的可重构连杆发生横滚时,位姿补偿组件中执行单元连接件保持不动,实现对可重构连杆横滚角的补偿。
5、位姿补偿组件包括:执行单元连接件,锥齿轮组壳体,第一齿轮轴固定器,主动锥齿轮,主动齿轮轴,从动锥齿轮,从动齿轮轴,第二齿轮轴固定器。
6、所述的锥齿轮组壳体由两个相同的侧面壳板、两个相同的半圆孔夹紧板和两个相同的内圆孔连接板组成。
7、所述的第一齿轮轴固定器由两个相同的滑动轴承、四个相同的深沟球轴承和台阶圆筒组成。
8、所述的第二齿轮轴固定器由两个相同的轴端挡圈、两个相同的圆柱滚子轴承和法兰组成。
9、本发明具有的有益效果:
10、本发明利用锥齿轮传动设计位姿补偿可重构连杆装置,补偿可重构杆件的横滚角,实现可重构多足仿生机器人在躯干变形时各行走机构稳定支撑,有利于开发更多基于可重构躯干机构的仿生步态,提高多足机器人的复杂地形适应能力。
技术特征:
1.一种位姿补偿可重构连杆装置,其特征在于:
2.根据权利要求1所述的一种位姿补偿可重构连杆装置,其特征在于:
3.根据权利要求2所述的一种位姿补偿可重构连杆装置,其特征在于:
4.根据权利要求2所述的一种位姿补偿可重构连杆装置,其特征在于:
5.根据权利要求2所述的一种位姿补偿可重构连杆装置,其特征在于:
技术总结
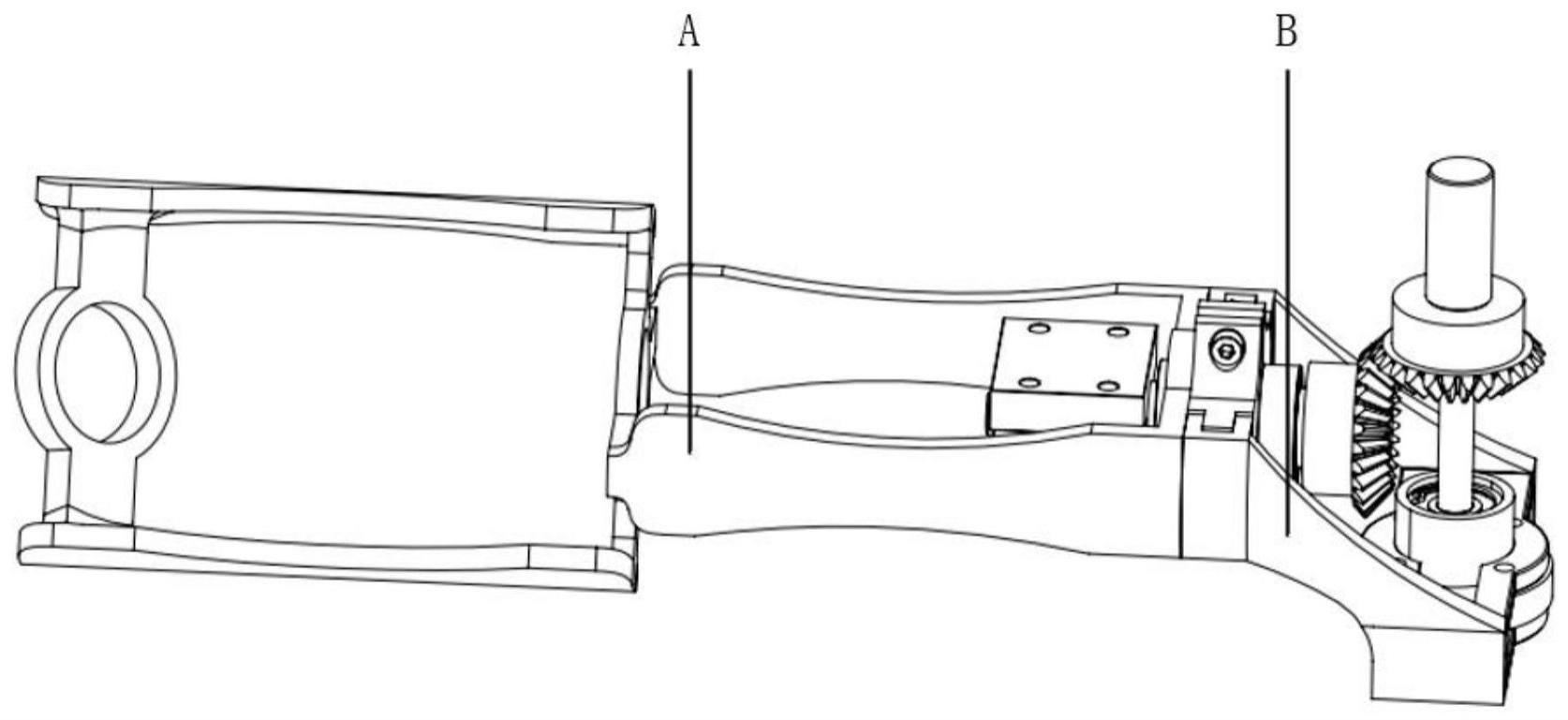
一种位姿补偿可重构连杆装置,该装置由可重构连杆(A)和位姿补偿组件(B)组成,可重构连杆(A)发生横滚时,位姿补偿组件(B)对横滚角进行补偿,可使连接的执行单元保持不动,应用于具有可重构躯干的多足仿生机器人中,补偿机器人躯干变形过程中可重构杆件产生的横滚角,保障行走机构稳定支撑且不增加额外驱动和控制复杂度。
技术研发人员:武建昫,曾亮,姬佳璐,唐绍斌,周俊灼,姚燕安
受保护的技术使用者:北京交通大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!