本发明涉及汽车控制,尤其涉及一种基于电机反馈转速波动补偿的方向盘抖动抑制方法。
背景技术:
1、电动助力转向系统是近年来迅速发展的一种新型动力转向装置,整个转向系统的零件多达100多个,零件之间的装配间隙严重影响着助力的稳定性、舒适性,尤其是原地慢打方向盘时出现的扭矩波动是行业中遇到的普遍难题,如何抑制或者消除方向盘扭矩波动,具有重要的意义。
技术实现思路
1、本发明提供一种基于电机反馈转速波动补偿的方向盘抖动抑制方法,减小了原地转向时的方向盘扭矩波动,增强了驾驶手感。
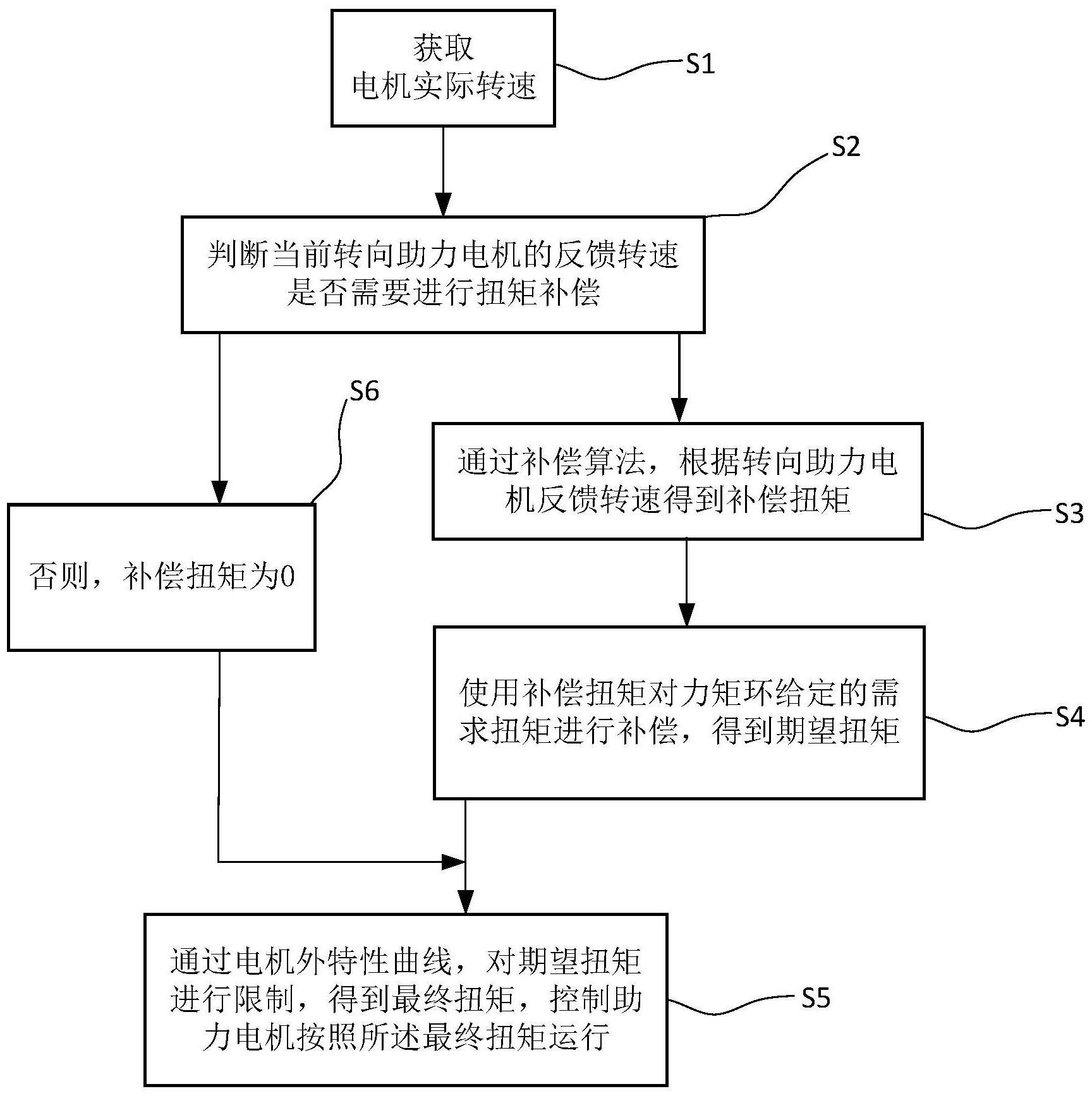
2、为了实现以上目的,本发明提供了一种基于电机反馈转速波动补偿的方向盘抖动抑制方法,包括如下步骤:
3、s1:通过rps传感器获取电机反馈转速feedspeed;
4、s2:通过反馈转速判断是否需要进行扭矩补偿;
5、如果不需要进行扭矩补偿,则补偿扭矩输出为0;如果需要进行扭矩补偿,则通过补偿算法,根据转向助力电机反馈转速得到补偿扭矩;
6、s3:使用滤波后的转速减滤波前的转速,转速差值作为pi控制器的输入,输出为扭矩补偿值;
7、由于不同时段的pi响应不同,因此使用电机反馈转速查表得到不同时段的pi参数,提高了补偿扭矩的响应性。对pi输出的补偿扭矩进行限制,得到限制后的补偿扭矩;
8、s4:使用补偿扭矩对力矩环给定的需求扭矩进行补偿,得到期望扭矩,所述力矩环为转向助力系统计算助力大小的模块;
9、s5:通过电机外特性曲线,对期望扭矩进行限制,得到最终扭矩,控制转向助力电机按照所述最终扭矩运行。
10、进一步的,通过低通滤波器对电机反馈转速进行处理,使用公式speedfilt(n)=a*feedspeed(n)+(1-a)feedspeed(n-1),得到滤波转速speedfilt;
11、滤波系数的设定为:a=fc*2*π*△t;
12、通过滤波转速speedfilt与电机反馈转速feedspeed做差;
13、公式为:speeddiff=speedfilt–feedspeed,最终得到不含高频波动的波动转速speeddiff。
14、补偿算法如下:所述补偿算法中计算补偿扭矩的输入为波动转速,输出为补偿扭矩;
15、公式为:
16、torquecom=a+b
17、a=kp*speeddiff
18、b=ki*(∑speeddiff)
19、其中kp、ki为pi调节的比列系数与积分系数;a、b为pi调节的比例部分与积分部分;torquecom为补偿扭矩。
20、进一步的,对所述电机反馈转速feed speed进行低通滤波处理,由于不同时段的一阶低通滤波器截止频率不同,因此需要根据转速分段优化不同转速段的截止频率,使用第一查表,根据转速得到不同时段的滤波系数a;
21、对所述补偿扭矩的计算方法,由于不同时段pi响应也不同,因此pi控制的kp、ki系数也不同,根据电机反馈转速,使用第二查表得到不同时段的kp、ki值。
22、进一步的,对得到的补偿扭矩进行限制,当补偿扭矩大于上限值时,补偿扭矩输出为上限值;当补偿扭矩小于下限值时,补偿扭矩输出为下限值,否则输出为当前补偿扭矩。[0004]进一步的,将电机转速通过滞环处理,用于判断是否需要进行扭矩波动补偿,使用滞环处理的目的是减小由于条件切换导致的pi不断开启关闭,从而造成额外的扭矩波动。
23、进一步的,为了避免由于条件切换导致的pi不断开启关闭造成额外的扭矩波动,采用滞环处理对电机反馈转速进行判断是否需要进行扭矩补偿,方法如下:
24、(feedspeed>speedlimmax)and(feedspeed>speedlimmin)enable=0;
25、(feedspeed<speedlimmax)and(feedspeed<speedlimmin)enable=1;
26、other enable=enablelast
27、enable为1时pi控制使能,按照所述补偿扭矩计算方法计算补偿扭矩,enable为0时pi控制不使能,输出补偿扭矩为0。
28、使用滤波后的转速减滤波前的转速,转速差值作为pi控制器的输入,输出为扭矩补偿值。
29、由于不同时段的pi响应不同,因此使用电机反馈转速查表得到不同时段的pi参数,提高了补偿扭矩的响应性。对pi输出的补偿扭矩进行限制,得到限制后的补偿扭矩。
30、进一步的,补偿扭矩和扭矩环给定的需求扭矩相加得到期望扭矩,期望扭矩通过电机外特性曲线限制后得到最终扭矩,转向助力电机按照最终扭矩运行。利用所述转向助力电机反馈转速,通过第三查表得到转向助力电机外特性扭矩限值,如果期望扭矩绝对值大于外特性扭矩限制值绝对值,则最终扭矩为外特性扭矩限值,否则,最终扭矩为期望扭矩,作为电机指令扭矩控制电机输出扭矩。
31、本发明专利与现有技术相比,有益效果是:
32、1.整个控制逻辑直观高效,能够使用转速波动巧妙的解算出补偿扭矩,从而抑制因转速突变造成的方向盘扭矩波动;2.通过不同转速段查表的方式查找滤波系数,从而使整个转速都得到较好地滤波效果;3.使用不同转速段的pi参数,能提高控制的响应性;4.使用滞环处理,减少了额外的附加扭矩波动;5.更容易工程实现和工程应用价值。
技术特征:1.一种基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于,包括:
2.根据权利要求1所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:所述s2中,根据电机反馈转速feedspeed得到补偿扭矩具体步骤为:
3.根据权利要求2所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:所述s3中,补偿算法如下:所述补偿算法中计算补偿扭矩的输入为波动转速,输出为补偿扭矩;
4.根据权利要求3所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:所述s3中,对所述电机反馈转速feedspeed进行低通滤波处理,由于不同时段的一阶低通滤波器截止频率不同,因此需要根据转速分段优化不同转速段的截止频率,因此使用第一查表,根据转速得到不同时段的滤波系数a;
5.根据权利要求4所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:对得到的补偿扭矩进行限制,当补偿扭矩大于上限值时,补偿扭矩输出为上限值;当补偿扭矩小于下限值时,补偿扭矩输出为下限值,否则输出为当前补偿扭矩。
6.根据权利要求2所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:所述s2中,为了避免由于条件切换导致的pi不断开启关闭造成额外的扭矩波动,采用滞环处理对电机反馈转速进行判断是否需要进行扭矩补偿,方法如下:
7.根据权利要求1所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:所述s4中,补偿扭矩值与力矩环给定需求矩值相加得到期望扭矩,所述力矩环为转下助力系统计算转向助力大小的模块。
8.根据权利要求7所述的基于电机反馈转速波动补偿的方向盘抖动抑制方法,其特征在于:所述s5中,对期望扭矩进行限制得到最终扭矩的具体内容包括:利用所述电机反馈转速,通过第三查表得到转向助力电机外特性扭矩限值,如果期望扭矩绝对值大于外特性扭矩限制值绝对值,则最终扭矩为外特性扭矩限值,否则,最终扭矩为期望扭矩,作为电机指令扭矩控制电机输出扭矩。
技术总结本发明专利提供了一种基于电机反馈转速波动补偿的方向盘抖动抑制方法,首先通过获取的转向助力电机反馈转速判断是否需要进行扭矩补偿,如果反馈转速小于设定阈值则按照扭矩补偿算法进行扭矩补偿,并对反馈转速进行低通滤波处理,获取期望扭矩;通过电机外特定对期望扭矩限制得到最终扭矩,控制所述转向助力电机按照最终扭矩运行。由于转向助力电机的最终扭矩是通过助力电机反馈转速对力矩环给定的期望扭矩补偿后得到的,因此原地慢打方向盘时能够减小电机反馈转速的波动,从而减小方向盘扭矩波动,增强了方向盘手感。
技术研发人员:张旭斌,王晓琪,缪鹏虎,张秀莲,张林虎,王俊杰,陈建坤
受保护的技术使用者:南京东华智能转向系统有限公司
技术研发日:技术公布日:2024/1/11