一种卡车急减速过程中的转向控制装置及方法与流程
本发明涉及卡车驾驶安全,更具体地,涉及一种卡车急减速过程中的转向控制装置及方法。
背景技术:
1、重型卡车做为高速物流的主要运输工具,普遍满载质量超过35吨,车辆带挂宽度超过2.5m。如此庞然大物在高速行驶制动时,会因为制动力分配不均、整车质心偏移、胎压不足或板簧变形等多种因素,导致高速行驶状态下紧急制动时会产生车辆跑偏的问题。一旦发生此类跑偏现象,车辆会驶入侧边车道,更有甚者会因为车头跑偏严重而导致侧翻。
2、此类跑偏情况下,绝大部分驾驶室内的方向盘并无明显偏转,司机通常需要及时反打方向,才能实现车辆纠偏。在人工驾驶时,司机尚可及时应变,但是面向l3及以上高级别自动驾驶系统时,则无法进行及时纠偏。
3、因此,如何提供一种应对急减速过程中易发的跑偏问题的转向控制装置及方法成为本领域亟需解决的技术难题。
技术实现思路
1、本发明的目的是提供一种卡车急减速过程中的转向控制装置及方法,以解决上述背景技术中提出的问题。
2、根据本发明的一方面,提供了一种卡车急减速过程中的转向控制装置,包括控制单元和转向抑制机构;
3、所述转向抑制机构安装在前桥总成的转向横拉杆上,其包括机构本体、气缸以及v楔形滑块,所述机构本体套设在所述转向横拉杆上,所述转向横拉杆上设有同轴设置的锥形凸台;
4、所述气缸设置在所述机构本体的外侧,且所述气缸的活塞杆连接有推板,所述推板上设有多根导杆,所述导杆延伸至所述机构本体的内部,并与所述v楔形滑块连接,所述v楔形滑块面向所述锥形凸台的一侧设有v型卡槽,所述v型卡槽与所述锥形凸台相互配合;
5、所述控制单元与所述气缸电连接,以使得所述气缸能够带动所述v楔形滑块紧贴或远离所述锥形凸台,从而锁定或松开所述转向横拉杆。
6、可选地,根据本发明所述的卡车急减速过程中的转向控制装置,所述机构本体相对的两内侧壁上开设有滑槽,所述v楔形滑块的两端设有与所述滑槽相配合的导轨。
7、可选地,根据本发明所述的卡车急减速过程中的转向控制装置,所述导杆的数量为四根,以所述气缸为中心分别设置在所述推板的四个角落处。
8、根据本发明的第二方面,还提供了一种卡车急减速过程中的转向控制方法,采用上述实施例中任一项所述的转向控制装置及以下步骤:
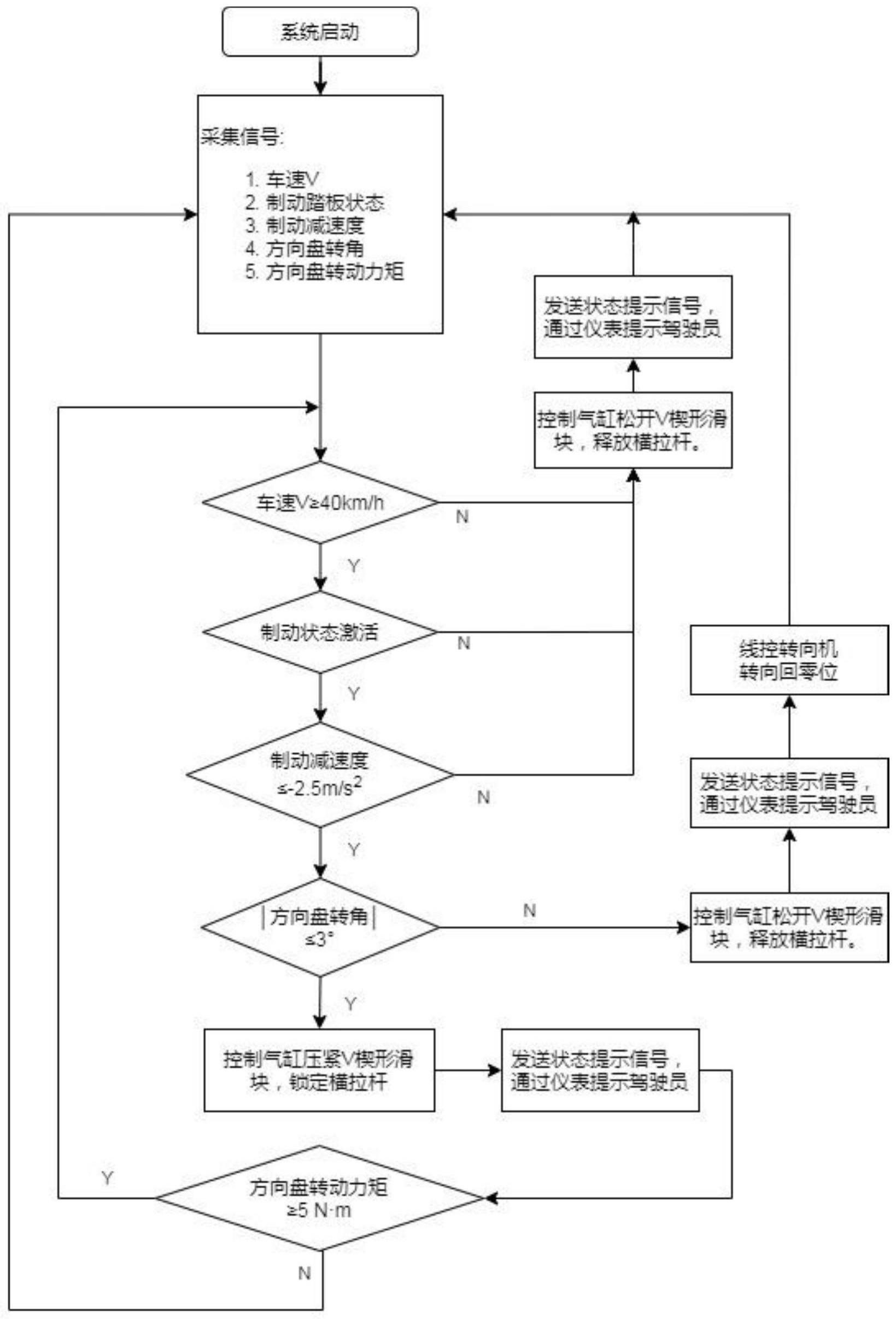
9、步骤1,转向控制装置启动,控制单元实时采集信号;
10、步骤2,当车速大于预定车速时,转向控制装置进入识别状态;
11、步骤3,持续监控刹车制动系统的状态信号,当制动系统制动状态激活时,进入减速监测状态;
12、步骤4,持续监测整车制动减速度,当减速度大于预定减速度时,表面车辆制动力较大,存在紧急制动指标,进入步骤5,反之回到步骤1;
13、步骤5,判断车辆进入紧急制动状态时,通过线控指令使转向机回零位,确保车辆方向回正,此时进入步骤6,反则回到步骤1;
14、步骤6,当紧急制动状态下的车辆,转向回零位后,控制单元启动转向抑制机构,锁定转向横拉杆,并通过仪表进行状态提示;
15、步骤7,持续监控方向盘的转动力矩,以此识别驾驶员是否存在人为转向的需求,若转向力矩大于预定力矩值时,则进入步骤2;反之回到步骤1,进行持续循环监控,直至退出紧急制动状态后,转向抑制机构释放转向横拉杆,解除主动转向干预,恢复正常行驶状态。
16、可选地,根据本发明所述的卡车急减速过程中的转向控制方法,在所述步骤1中,所述控制单元采集的信号包括车速v、制动踏板状态、制动减速度、方向盘转角、方向盘转动力矩。
17、可选地,根据本发明所述的卡车急减速过程中的转向控制方法,在所述步骤2中,所述预定车速为40km/h。
18、可选地,根据本发明所述的卡车急减速过程中的转向控制方法,在所述步骤4中,所述预定减速度为-2m/s2。
19、可选地,根据本发明所述的卡车急减速过程中的转向控制方法,在所述步骤7中,所述预定力矩值为5n·m。
20、可选地,根据本发明所述的卡车急减速过程中的转向控制方法,在所述步骤5中,当方向盘转角小于3°时,转向机回零位,车辆方向回正。
21、本发明通过该装置及方法可以在卡车高速行驶急减速情况下,自动确保车辆转向轮不跑偏,避免发生侧滑、翻转及碰撞等严重事故,可以降低司机的操作难度,满足高级别自动驾驶系统的控制需求,提升行车安全性。转向抑制机构安装在前桥总成的前轴中间位置,保证锁死转向横拉杆,从板簧下面控制车辆前轮跑偏角度,使车辆保持直线行驶直至停止。
22、通过以下参照附图对本发明的示例性实施例的详细描述,本发明的其它特征及其优点将会变得清楚。
技术特征:
1.一种卡车急减速过程中的转向控制装置,其特征在于,包括控制单元和转向抑制机构;
2.根据权利要求1所述的卡车急减速过程中的转向控制装置,其特征在于,所述机构本体相对的两内侧壁上开设有滑槽,所述v楔形滑块的两端设有与所述滑槽相配合的导轨。
3.根据权利要求2所述的卡车急减速过程中的转向控制装置,其特征在于,所述导杆的数量为四根,以所述气缸为中心分别设置在所述推板的四个角落处。
4.一种卡车急减速过程中的转向控制方法,其特征在于,采用权利要求1至3中任一项所述的转向控制装置及以下步骤:
5.根据权利要求4所述的卡车急减速过程中的转向控制方法,其特征在于,在所述步骤1中,所述控制单元采集的信号包括车速v、制动踏板状态、制动减速度、方向盘转角、方向盘转动力矩。
6.根据权利要求4所述的卡车急减速过程中的转向控制方法,其特征在于,在所述步骤2中,所述预定车速为40km/h。
7.根据权利要求4所述的卡车急减速过程中的转向控制方法,其特征在于,在所述步骤4中,所述预定减速度为-2m/s2。
8.根据权利要求4所述的卡车急减速过程中的转向控制方法,其特征在于,在所述步骤7中,所述预定力矩值为5n·m。
9.根据权利要求4所述的卡车急减速过程中的转向控制方法,其特征在于,在所述步骤5中,当方向盘转角小于3°时,转向机回零位,车辆方向回正。
技术总结
本发明公开了一种卡车急减速过程中的转向控制装置及方法,该装置包括控制单元和转向抑制机构;转向抑制机构安装在前桥总成的转向横拉杆上,其包括机构本体、气缸以及V楔形滑块,机构本体套设在转向横拉杆上,转向横拉杆上设有同轴设置的锥形凸台;气缸设置在机构本体的外侧,且气缸的活塞杆连接有推板,推板上设有多根导杆,导杆延伸至机构本体的内部,并与V楔形滑块连接,V楔形滑块面向锥形凸台的一侧设有V型卡槽,V型卡槽与锥形凸台相互配合。本发明可以在卡车高速行驶急减速情况下,自动确保车辆转向轮不跑偏,避免发生侧滑、翻转及碰撞等严重事故,可以降低司机的操作难度,满足高级别自动驾驶系统的控制需求,提升行车安全性。
技术研发人员:彭宏伟,倪丽,崔洋,刘然
受保护的技术使用者:安徽江淮汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!