一种机械臂协同工作的电驱动四足机器人
本发明涉及一种用于能够实现机械臂协同工作的四足机器人,属于协作型处置机器人。
背景技术:
1、足臂式机器人在穿越复杂地形、执行复杂多样的操作任务时,四足双臂机器人具有更多的自由度、更大的工作空间、更强的负载能力,而四足单臂机器人会存在自由度少,工作空间小,单臂负载能力不足等问题,无法顺利执行任务。四足双臂机器人在实际应用中的机械臂布局多为人马式,这种机械臂布局需要配重来保持平衡,而且工作空间较小。
2、四足双臂可以完成更为复杂的任务,相应的对机器人的设计提出了更高的要求,机器人的整体结构如何设计,双臂以何种方式装载能够在保持四足机器人平衡的同时具有更大的工作空间,成为了一个非常重要的研究课题。
3、cn109176455a公开一种多机械臂四足机器人,该种机器人的驱动部分为腿部及机械臂液压驱动,腿部结构采取前肘后膝式的配置形式,开环关节连杆机构,分为髋部连接大腿小腿的形式,两两之间配置旋转关节以达到走动目的。该机器人中的机械臂只能在固定基座上工作,就是平台基座可移动、倾斜和俯仰,而不能进行全方位移动、横滚和俯仰。
4、cn111381815a公开的离线编程后置代码转换方法和基于该方法的双机器人协同智造系统、方法,在仿真系统中导入仿真机器人、加工工具及零件的实体模型,根据加工需求对系统进行合理布局和标定,生成加工轨迹;仿真检验轨迹点是否可达,对不可达、轴超限等异常轨迹点进行调整;利用后置代码转换算法,将调整好的轨迹点转换为相应型号的实体机器人的运行代码,两台实体机器人在满足相互通信的条件下,通过运行代码,既可完成单机加工、双机同步独立加工,也可进行双机协同加工。该系统、方法是对两台工业机器人的运行模式进行控制,不适用于同一机器人上的双臂协同运行。
5、cn108818493a一种复合型移动机器人及复合型移动机器人控制系统,复合型移动机器人包括一移动平台和安装于该移动平台上的机械臂、工控机、传感器系统和供电模块,该移动平台安装有能使该移动平台全向运动的行走装置。该机器人为腿轮式机器人,不能实现单独控制、向任意角度伸缩,平衡性控制能力低。
6、因此,如何使四足机器人完成更为复杂的任务,双臂以何种方式装载能够在保持四足机器人平衡的同时具有更大的工作空间,是亟需解决的问题。
技术实现思路
1、本发明针对现有液压四足双臂机器人技术在装载及平衡方面存在的不足,提供一种结构紧凑、不需要配重就可以保持机器人平衡,且实现机械臂协同工作的电驱动四足机器人,使得四足双臂可以完成更为复杂的任务。
2、本发明的机械臂协同工作的电驱动四足机器人,采用以下技术方案。
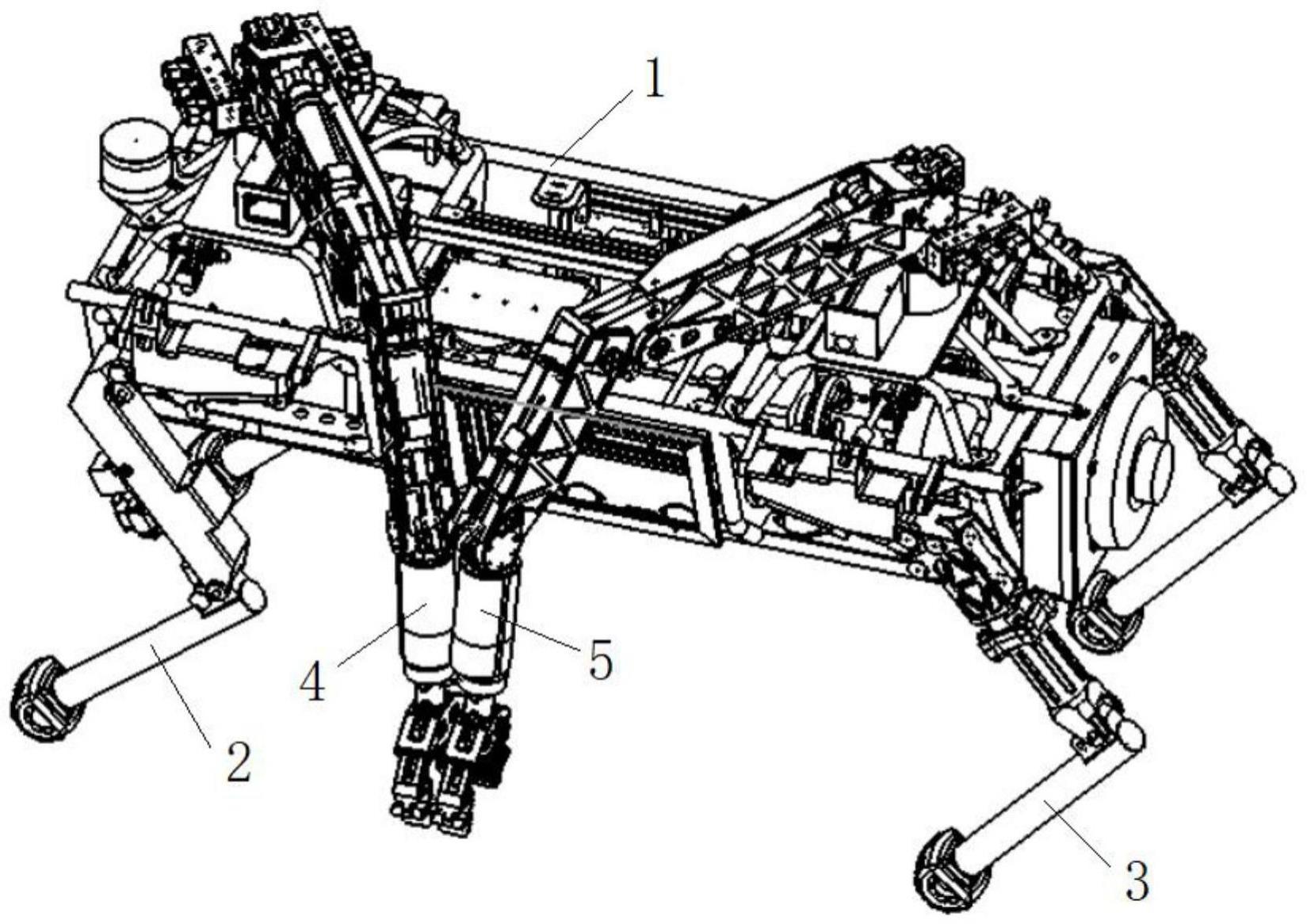
3、该机器人,包括四足平台,四足平台的下部安装有前腿和后腿,四足平台的上部安装有前机械臂和后机械臂;所述四足平台的内部设置有机架,机架上固定安装有散热器、液压站和电池,液压站中的液压泵与电机的转轴连接,电机与电池电连接;所述机械臂包括与所述四足平台固定连接的基座,基座通过腰部回转关节连接在四足平台上,大臂的一端通过肩部俯仰关节连接在基座上,小臂的一端通过肘部俯仰关节与大臂另一端连接,小臂的另一端通过腕部回旋关节连接手腕,手爪通过手爪旋转关节与手腕连接;手爪的开合能够保证前机械臂和后机械臂协同作业,前机械臂和后机械臂在协同作业中位置实时严格同步,两个机械臂在位置同步协同过程中不直接接触。
4、所述前机械臂和后机械臂分别安装在前腿处机身上方与后腿处机身上方。
5、所述前机械臂或后机械臂共有六个油缸,分别为基座油缸、大臂油缸、二臂油缸、小臂油缸、手腕油缸和手爪油缸,基座油缸和手腕油缸两个油缸通过齿轮齿条机构分别控制整个机械臂臂绕垂直轴线的回转和机械手绕第三臂轴线的回转,手爪的抓握动作由手爪油缸一个液压缸进行控制。
6、所述前机械臂和后机械臂收缩时处于交叉状态,两个机械臂所占空间的长度和宽度与所述四足平台的长度和宽度一致。
7、上述四足机器人在行走时,前腿主要是承受竖直方向的支撑力,后腿除承受竖直方向的支撑力外,还要承受大部分的沿运动方向的驱动力。当需要进行作业时,电机带动液压泵将油液传递到液压站,从而完成能量的转化,驱动各液压机构运行,使每个机械臂具有五个自由度,基座、大臂、小臂、手腕和手爪均可绕各自的关节旋转,使得末端手爪可以实现空中不同位姿,且手爪开合较大,能够保证前机械臂和后机械臂协同作业,不考虑机构运动学、动力学和控制的误差。
8、本发明使用电力系统,与传统的燃油机驱动液压系统相比,可方便调控转速,可根据实际需求调整不同的转速,从而达到节能等各种功能;两个机械臂前后布置,并非“人马形”四足双臂机器人,两个机械臂可保持交叉状态,机器人结构更加紧凑,不需要配重就可以保持机器人的平衡,减轻了自身重量,增加了机器人的运动稳定性,增加了机器人协同作业有效范围以及抓取能力,使得四足双臂可稳定地协同抓取大重量物品。
技术特征:
1.一种机械臂协同工作的电驱动四足机器人,其特征是:包括四足平台,四足平台的下部安装有前腿和后腿,四足平台的上部安装有前机械臂和后机械臂;所述四足平台的内部设置有机架,机架上固定安装有散热器、液压站和电池,液压站中的液压泵与电机的转轴连接,电机与电池电连接;所述机械臂包括与所述四足平台固定连接的基座,基座通过腰部回转关节连接在四足平台上,大臂的一端通过肩部俯仰关节连接在基座上,小臂的一端通过肘部俯仰关节与大臂另一端连接,小臂的另一端通过腕部回旋关节连接手腕,手爪通过手爪旋转关节与手腕连接;手爪的开合能够保证前机械臂和后机械臂协同作业,前机械臂和后机械臂在协同作业中位置实时严格同步,两个机械臂在位置同步协同过程中不直接接触。
2.根据权利要求1所述的机械臂协同工作的电驱动四足机器人,其特征是:所述前机械臂和后机械臂分别安装在前腿处机身上方与后腿处机身上方。
3.根据权利要求1所述的机械臂协同工作的电驱动四足机器人,其特征是:所述前机械臂或后机械臂共有六个油缸,分别为基座油缸、大臂油缸、二臂油缸、小臂油缸、手腕油缸和手爪油缸,基座油缸和手腕油缸两个油缸通过齿轮齿条机构分别控制整个机械臂臂绕垂直轴线的回转和机械手绕第三臂轴线的回转,手爪的抓握动作由手爪油缸一个液压缸进行控制。
4.根据权利要求1所述的机械臂协同工作的电驱动四足机器人,其特征是:所述前机械臂和后机械臂收缩时处于交叉状态,两个机械臂所占空间的长度和宽度与所述四足平台的长度和宽度一致。
技术总结
一种机械臂协同工作的电驱动四足机器人,包括四足平台,四足平台的下部安装有前腿和后腿,四足平台的上部安装有前机械臂和后机械臂;所述四足平台的内部设置有机架,机架上固定安装有散热器、液压站和电池;所述机械臂包括与所述四足平台固定连接的基座,基座通过腰部回转关节连接在四足平台上,大臂的一端通过肩部俯仰关节连接在基座上,小臂的一端通过肘部俯仰关节与大臂另一端连接,小臂的另一端通过腕部回旋关节连接手腕,手爪通过手爪旋转关节与手腕连接;前机械臂和后机械臂在协同作业中位置实时严格同步。本发明使用电力系统,方便调控转速,结构更加紧凑,不需要配重就可以保持机器人的平衡,增加了机器人的运动稳定性。
技术研发人员:柴汇,宫振伟,李贻斌,刘松,付鹏,刘建利
受保护的技术使用者:山东大学
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!