多自由度脊柱关节四足机器人及其刚度自适应控制方法
本发明涉及机器人,具体涉及多自由度脊柱关节四足机器人及其刚度自适应控制方法。
背景技术:
1、近年来机器人技术有了很大的发展,尤其是足式机器人,相比于轮式、履带式移动机器人,足式机器人具有显著的灵活性、越障能力以及环境适应能力。足式机器人一般分为两足式、四足式、六足式、八足式等,其中四足机器人结构简单,具有良好的灵活性、承载能力和稳定性,在抢险救灾、探险勘测、娱乐及军事等多方面有很好的应用前景。
2、目前,国内外四足机器人研究平台有很多,市场上也开始出现许多四足机器人产品,但是现有的四足机器人大多数采用刚性躯干作为机身,这种设计方式结构与控制简单,但是确与动物自身特性相去甚远,科研人员在观察猎豹的运动模式时发现,猎豹能够具备高速运动能力很大一部分与脊柱的协调运动有关。
3、因此研究具有脊柱关节的刚度自适应四足机器人变得更为关键。
技术实现思路
1、为解决上述技术问题中的至少之一,本发明提供多自由度脊柱关节四足机器人,可以提高机器人动作的灵活性,同时减少高速运动中产生的冲击。
2、本发明的技术方案如下:
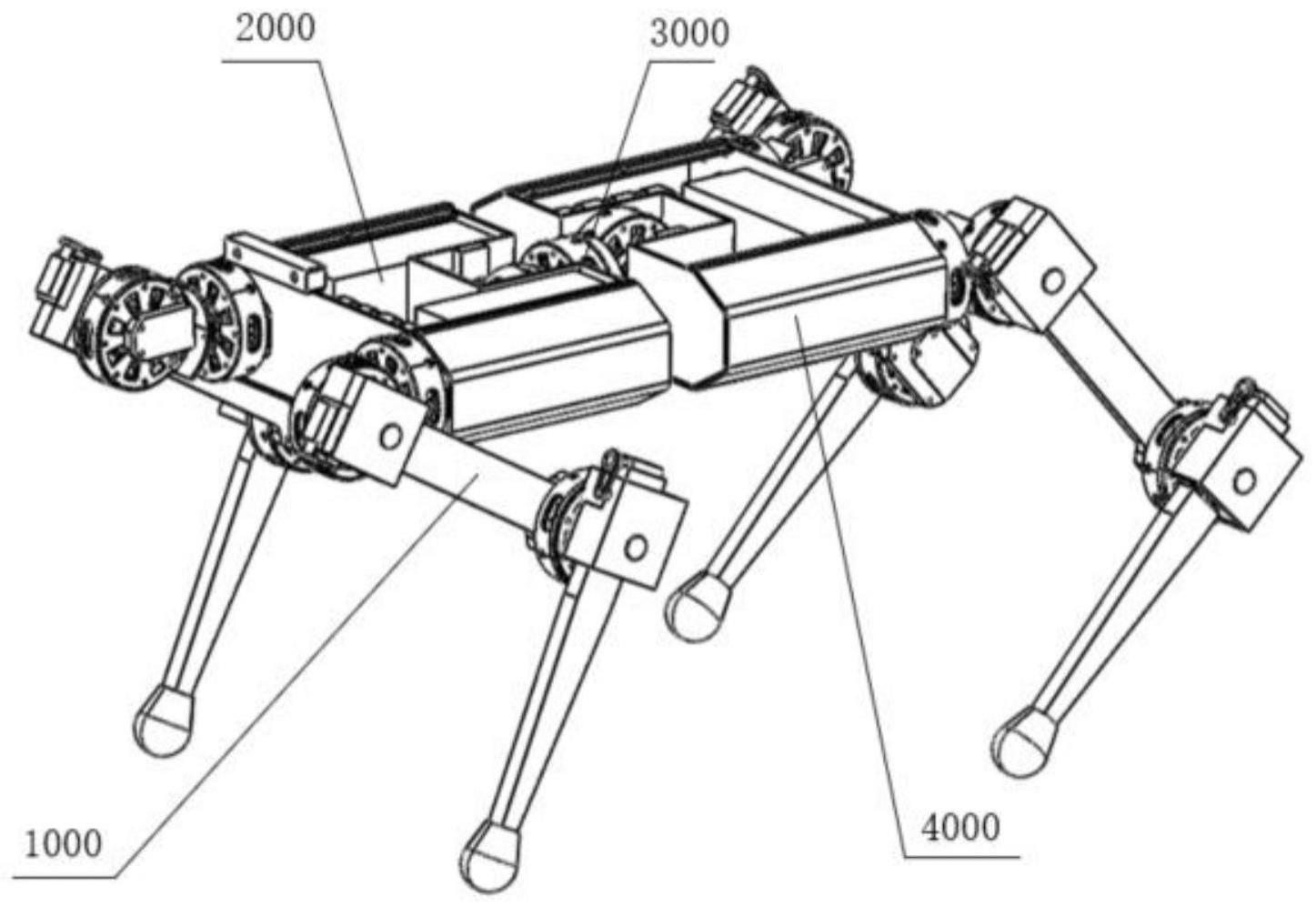
3、多自由度脊柱关节四足机器人包括躯干,多自由度脊柱关节和机械腿。所述躯干包括前躯干与后躯干。所述前躯干通过多自由度脊柱关节与后躯干连接,通过多自由度脊柱关节实现前躯干相对于后躯干进行俯仰与横滚运动。
4、进一步的,所述多自由度脊柱关节设置为三个关节,包含两个俯仰关节与一个横滚关节,每个关节均包含刚度自适应主动调节组件,所述多自由度脊柱关节与前后躯干铰接。
5、进一步的,所述机械腿设置为四组,采用全肘式配置在前躯干与后躯干,每组机械腿包含一个侧摆关节组件,一个髋部关节组件,一个膝部关节组件,每个组件均包含刚度自适应主动调节组件,通过侧摆关节组件实现大小腿侧摆动作,通过髋部关节组件实现大腿转动,通过膝部关节组件实现小腿转动。
6、进一步的,所述前躯干包括前躯干前板,前躯干左板,前躯干右板,前躯干底板,前躯干后板,其中前躯干前板,前躯干后板与前躯干左板,前躯干后板通过螺钉固定连接,前躯干后板与所述多自由度脊柱关节固定连接,前躯干前板,前躯干后板,前躯干左板,前躯干右板均安装在前躯干底板上。
7、进一步的,所述前躯干还包括电池,前躯干控制系统,前躯干惯性测量单元,摄像头。电池,前躯干控制系统,前躯干惯性测量单元均固定安装在前躯干底板上方,摄像头固定安装在前躯干前板上。
8、进一步的,所述后躯干包括后躯干前板,后躯干左板,后躯干右板,后躯干底板,后躯干后板,其中后躯干前板,后躯干后板与后躯干左板,后躯干后板通过螺钉固定连接,后躯干前板与所述多自由度脊柱关节固定连接,后躯干前板,后躯干后板,后躯干左板,后躯干右板均安装在后躯干底板上。
9、进一步的,所述后躯干还包括后躯干控制系统,后躯干惯性测量单元。后躯干控制系统,后躯干惯性测量单元均固定安装在后躯干底板上方。
10、进一步的,所述多自由度脊柱组件具体包括前躯干俯仰电机,前躯干俯仰变刚度组件,前躯干俯仰关节连接件,横滚关节电机,后躯干俯仰关节连接件,后躯干俯仰变刚度组件,后躯干俯仰电机。所述前躯干俯仰电机固定端通过螺栓安装在所述前躯干后板上,所述前躯干俯仰变刚度组件与所述前躯干俯仰电机输出端通过螺栓连接,与所述俯仰关节连接件通过螺栓固定连接,所述横滚关节电机固定端与所述俯仰关节连接件通过螺栓固定连接,输出端与后躯干俯仰关节连接件通过螺栓固定连接,所述后躯干俯仰变刚度组件与所述后躯干俯仰关节连接件通过螺栓固定连接,与所述后躯干俯仰电机输出端通过螺栓固定连接,所述后躯干俯仰电机与所述后躯干前板通过螺栓固定安装。
11、进一步的,所述机械腿具体包括躯干连接件,侧摆电机,侧摆连接件,髋部电机,髋部变刚度组件,大腿板,膝部电机,膝部变刚度组件,小腿板,球状足端,磁编码器,磁铁。所述侧摆电机固定端通过螺栓安装在所述躯干连接件上,所述磁编码器通过螺钉固定在所述侧摆电机固定端上,所述磁铁通过胶接固定在所述侧摆电机轴上,所述侧摆连接件通过螺栓固定安装在所述侧摆电机输出端,所述髋部电机固定端通过螺栓安装在所述侧摆电机连接件上,所述磁编码器通过螺钉固定在所述髋部电机固定端上,所述磁铁通过胶接固定在所述髋部电机轴上,所述髋部变刚度组件固定安装在所述髋部电机输出端,所述大腿板与所述髋部变刚度组件固定连接,所述膝部电机固定端通过螺栓安装在所述大腿板上,所述磁编码器通过螺钉固定在所述膝部电机固定端上,所述磁铁通过胶接固定在所述膝部电机轴上,所述膝部变刚度组件固定端通过螺栓安装在所述膝部电机输出端,所述小腿板与所述膝部变刚度组件外壳通过螺栓固定连接,所述球状足端通过胶接在小腿板末端。
12、进一步的,所述刚度自适应主动调节组件包括壳体、动力输入端和变刚度调节组件,动力输出端。所述壳体包括与动力输入端连接的变刚度关节底座和保护变刚度组件的变刚度关节壳体。所述动力输入端用于驱动动力输出端围绕其回转中心进行转动,其包括关节电机组件,电机输出法兰盘,组件由电机和减速器组成。
13、进一步的,所述变刚度调节组件用于根据动力输出端的实际需要调节关节的刚度值,其包括一个卷簧底座,设置在所述变刚度关节底座上,与所述关节电机输出轴通过螺栓固定连接;一个卷簧,设置在所述底座中;卷簧连接件,与卷簧中心连接,可以绕中心轴转动并带动卷簧进行刚度调节;一对蜗轮蜗杆,蜗轮与卷簧连接件通过键连接,带动卷簧连接件旋转,蜗杆通过轴承安装在所述变刚度关节底座上,与所述蜗杆啮合;一个电机安装座,通过螺钉固定安装在所述变刚度关节底座上。一个刚度调节电机,设置在所述电机安装座上,与所述蜗杆通过同步带轮连接。其中所述卷簧连接件下端轴设有连接槽,与卷簧中心输入端连接,上端轴与所述蜗轮通过平键连接,由蜗轮带动连接件,并通过连接槽顺时针旋转带动卷簧向内卷曲增大刚度,逆时针旋转使卷簧向外扩张减小刚度。其中所述卷簧底座上设有安装槽,与卷簧外圈折弯处输出端固定连接,可以由卷簧带动动力输出端旋转。
14、进一步的,所述球状足端表面设置有橡胶软垫部件。
15、进一步的,所述橡胶软垫部件上贴有足端压力传感器,与所述橡胶软垫部件采用胶接的方式。
16、进一步的,所述四足机器人根据摄像头,足端传感器,惯性测量单元,前、后躯干控制系统等部件共同工作,融合采集到的信息,计算出机器人前方地形的地形落差高度h1等信息,再计算出所述四足机器人各变刚度关节所需要的关节刚度,通过控制多自由度脊柱关节使前后躯干蜷缩运动降低重心,通过所述刚度调节电机调整所述变刚度关节内部卷簧扭转量,来动态调整脊柱以及各腿部关节的刚度,在落地后,利用足端压力传感器感知地面对机器人足端冲击力,结合所述摄像头及惯性测量单元等采集到的信息,再次调整关节刚度,以应对高速运动或高落差地形中,复杂凹凸不平的地面对机器人的冲击,达到刚度自适应的功能。
17、进一步的,所述四足机器人根据周围地形信息(包括地形高低落差、坡度倾角、障碍物尺寸大小、不同类型地面等)和机器人当前状态的实时质心,结合足端压力,计算出各关节所需要的关节刚度,由所述后躯干控制系统经过计算将刚度转换成卷簧扭转量,再计算成各个刚度调节电机所需要转动的角度,将角度信号发送至变刚度关节中的刚度调节电机,,将角度信号发送至变刚度关节中的刚度调节电机,刚度调节电机通过同步带轮组带动蜗轮蜗杆转动,所述蜗轮蜗杆带动卷簧连接件,再带动卷簧调节扭转量,从而实现动态调整各关节刚度,四足机器人各个变刚度关节在关节刚度得到调节后,根据传感器采集到的数据计算出的地形高低落差等信息,动态调整各个关节扭转,来适应复杂凹凸不平的地面。
18、进一步的,所述四足机器人在奔跑的过程中需要增加速度时,所述后躯干控制系统增大控制电机转速,同时增加电机转角范围,使得腿部运动范围变大,此时所述磁编码器感应安装在电机轴端面上磁铁的旋转运动得到电机转速,所述前后躯干惯性测量单元检测到机器人运动速度变化,减小所述变刚度关节的刚度,从而减少机器人运动过程中速度增加时地面对四足机器人产生的巨大冲击力,同时增大所述多自由度脊柱关节中的俯仰关节角度信号范围,提高机器人腿部可达范围与落足距离;当机器人在奔跑的过程中需要减小速度时,所述后躯干控制系统减小电机转速,同时减小电机转角范围,使得腿部范围变小,此时所述磁编码器感应安装在电机轴端面上磁铁的旋转运动得到电机转速,所述前后躯干惯性测量单元检测到机器人运动速度变化,增大变刚度关节的刚度,减小多自由度脊柱关节中的俯仰关节角度信号范围,使机器人落足距离变小;在奔跑开始前,摄像头采集到的地形信息发生改变时,系统判断地形特性并根据地形平坦程度改变关节刚度,当前方路面为凹凸地面时减小关节刚度,为复杂地面的冲击提供缓冲,反之路面为平坦地面时则增大关节刚度;利用多自由度脊柱关节增大机器人运动空间,利用变刚度关节为四足机器人的运动提供缓冲,减少运动中的冲击对关节电机和机器人躯干震动影响。
19、进一步的,所述四足机器人从高处跳跃向低处时,所述前躯干控制系统根据所述前后躯干惯性测量单元、所述各关节电机磁编码器,以及所述足端压力传感器获得机器人实时姿态信息,通过调节横滚及俯仰脊柱关节以及腿部关节角度信号,使机器人前躯干向前方倾斜,使得机器人可以俯视前方高落差地形,所述摄像头和惯性测量单元等传感器采集地形信息,计算出地形落差高度h1,后躯干控制系统进一步通过调节横滚及俯仰脊柱关节以及腿部关节角度信号,使机器人前后躯干蜷缩运动,降低机器人重心,达到后躯干控制系统计算出的最优姿态,同时减小变刚度关节的刚度,减轻跳跃运动中地面对机器人的冲击力,当所述四足机器人落地后通过所述足端压力传感器感知地面对机器人产生的作用力,结合所述惯性测量单元检测的姿态角实时减小横滚脊柱关节角度,增大前后俯仰关节角度,减小机械腿关节角度,并增大髋关节和膝关节变刚度关节的刚度,使四足机器人能够在落地后保持稳定。
20、进一步的,所述四足机器人在攀爬倾斜台阶时,当地形信息(比如地形倾角θ,台阶高度h2,h3,h4等信息)及所需信号计算完成,所述后躯干控制系统给左前腿各关节发送角度信号,通过机械腿侧摆关节,髋关节和膝关节磁编码器感知左前角各关节转动位置,使左前腿达到倾斜台阶所需高度,当左前腿足端压力传感器检测到压力信号时,表示左前腿已经到达台阶,此时增大左前腿关节刚度,右前腿重复前述步骤直至右前腿足端压力传感器检测到压力信号。接着后躯干控制系统为横滚及俯仰脊柱关节提供角度信号,前躯干控制系统通过横滚及俯仰脊柱关节的磁编码器,以及前后躯干的惯性测量单元,获得机器人实时运动姿态,并实时调整四足机器人攀爬倾斜台阶时的姿态,直至达到计算得到的最优姿态;此时后躯干控制系统给机器人提供步态信号,使其正常前进,到达设定距离时停止发送步态信号,通过磁编码器感知左前角各关节转动位置,给机器人右后腿发送角度信号,使右后腿达到倾斜台阶所需高度,当右后腿足端压力传感器检测到压力信号时,增大右后腿关节刚度,此时增大刚度可以使机器人在攀爬过程中更加稳定,左后腿重复前述步骤。当四个足端压力传感器均检测到压力信号时,前躯干控制系统根据足端压力大小,并结合各关节电机的磁编码器、前后躯干惯性测量单元所获得机器人的实时姿态信息,改变前后躯干脊柱俯仰关节和横滚关节转角,实时调整机器人姿态,不断改变落足点,调整机器人的重心,来适应倾斜台阶,使四足机器人能在台阶上稳定运动。
21、本发明通过改进在此提供多自由度脊柱关节四足机器人,与现有技术相比,具有如下改进及优点:
22、1)本发明承载能力强、稳定性好和结构简单;
23、2)本发明多自由度机器腿通过关节电机驱动方式保证了一定的承重,同时加入主动变刚度组件提供一定的减震与防冲击能力,可以减小关节电机损耗,提高机器人寿命,能使机器人运动稳定,防止由于不规则地形空间变化或者环境扰动导致的倾覆问题。
24、3)本发明具有多自由度脊柱关节机器人具有更加广泛的机体形变能力以及空间适应性,且有利于轨迹的优化,并且增加机器人重心调整范围,可以攀爬倾斜台阶,在高低地形跳跃,提高机器人在复杂环境下的运动及越障能力,并能提供更加优越的奔跑特性。
25、4)本发明脊柱关节机器人能够融合机体多传感器系统感知自身姿态以及周围地形的复杂变化,通过多传感器系统采集地形信息,获得机器人实时姿态与足端接触力信号,机器人前后躯干控制系统计算出周围地形信息、机器人当前姿态、以及重心位置,再结合足端压力信号,计算出各个关节所需要的刚度,使机器人在复杂地形中奔跑、跳跃、攀爬时自适应调节各关节刚度,减小地面对机器人的冲击。
- 还没有人留言评论。精彩留言会获得点赞!