一种自动运输机器人的制作方法
本发明涉及物流运输,具体为一种自动运输机器人。
背景技术:
1、物流运输技术主要包括运输设施和运输作业两大类,前者属于运输硬技术,后者属于运输软技术。运输硬技术主要包括运输基础设施,如公路,铁路,海运,运输车等基础设施的完善,运输软技术则包括管理方法,物流技术,物流人员素养等。
2、在进行物流运输中的短暂转运运输装置大多使用自动运输机器人进行运输工作,在对粉尘类的货物进行运输时,由于其外部包装袋无法做到完全的防止内部粉尘溢出,导致在进行使用时运输机器人内部运输箱内壁沾染粉尘,在运送其他粉尘类的货物时,易发生混合,导致影响货物质量。
3、因此,设计实用性强和可以使移动刮板对运输箱底部内壁堆积的灰尘进行推送,同时可以对运输箱底部内壁上的灰尘进行刮除的一种自动运输机器人是很有必要的。
技术实现思路
1、本发明的目的在于提供一种自动运输机器人,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:一种自动运输机器人,包括移动底座,所述移动底座底部设置有移动轮,所述移动底座顶部固定连接有运输箱,所述运输箱顶部固定连接有调节箱,所述调节箱内设置有封闭机构,所述移动底座内设置有移位机构,所述运输箱内设置有清扫机构和刮尘机构。
3、所述封闭机构包括固定板、液压伸缩杆一、连接杆一、移动挡板一、定位板、液压伸缩杆二、连接杆二和移动挡板二,所述固定板固定连接于调节箱内顶部右侧中间,所述液压伸缩杆一固定连接于固定板背面,所述连接杆一固定连接于液压伸缩杆一后端,所述移动挡板一固定连接于连接杆一远离液压伸缩杆一一端,所述定位板固定连接于移动底座内顶部后侧靠近中部,所述液压伸缩杆二固定连接于定位板正面左侧,所述连接杆二固定连接于液压伸缩杆二前端,所述移动挡板二固定连接于连接杆二远离液压伸缩杆二一端。
4、根据上述技术方案,所述移位机构包括电机、皮带轮一、皮带、皮带轮二、转杆、移动丝杆和滚珠螺母副,所述电机固定连接于移动底座内左侧中部,所述电机有输出轴,所述皮带轮一固定连接于电机输出轴,所述皮带前端传动连接于皮带轮一,所述皮带轮二传动连接于皮带后端,所述转杆固定连接于皮带轮二中心,所述移动丝杆固定连接于转杆右端,所述滚珠螺母副螺纹连接于移动丝杆。
5、根据上述技术方案,所述清扫机构包括移动板、移动底板、定位环、清扫辊一、刮板块和清扫辊二,所述移动板固定连接于滚珠螺母副正面,所述移动底板固定连接于移动板顶部,所述定位环固定连接于移动底板背面,所述清扫辊一转动连接于定位环中部,所述刮板块转动连接于清扫辊一顶端,所述清扫辊二转动连接于刮板块正面。
6、根据上述技术方案,所述刮尘机构包括防护箱、滚珠风扇、移动刮板、防护框和刮尘块,所述防护箱固定连接于运输箱右侧,所述滚珠风扇设置于防护箱内左侧,所述移动刮板转动连接于清扫辊一底端,所述防护框固定连接于移动刮板顶部后端,所述刮尘块固定连接于运输箱内正面右侧。
7、根据上述技术方案,所述运输箱正面和背面均开设有容纳移动挡板一移动的矩形槽,所述刮尘块右侧抵接移动挡板一左侧,所述移动底座顶部开设有容纳移动挡板二移动的收纳槽。
8、根据上述技术方案,所述转杆左端转动连接移动底座左侧内壁,所述移动丝杆靠近左右两端均设置有限位环,所述移动丝杆右端转动连接移动底座右侧内壁,可以对移动丝杆进行支撑,同时通过设置限位环,可以对滚珠螺母副移动距离进行限位工作。
9、根据上述技术方案,所述防护框背面右侧后端固定连接有固定架,固定架中部转动连接有沾灰辊,沾灰辊背面滑动连接运输箱背面内壁,可以通过设置的沾灰辊将运输箱内壁上难以清除的粉尘擦除。
10、根据上述技术方案,所述皮带、皮带轮二、转杆、移动丝杆和滚珠螺母副数量均为两个,两个所述皮带、皮带轮二、转杆、移动丝杆和滚珠螺母副对称分布在电机正面和背面,可以使移动板在移动时更为稳定,所述移动底座底部中间开设有漏灰槽。
11、根据上述技术方案,所述防护箱左侧、防护箱右侧和运输箱右侧在同一水平线上均开设有相连通的通风槽,可以将防护箱右侧空气吸入并吹送至运输箱内部。
12、与现有技术相比,本发明所达到的有益效果是:本发明,当需要对运输箱内壁进行清扫时,通过使用电机,使清扫辊一对运输箱正面和背面内壁进行清扫,随后通过设置在防护框背面的沾灰辊,对运输箱内壁上残留的灰尘进行粘除,随着清扫辊一在移动时旋转,可以使清扫辊一上的毛刷接触沾灰辊,可以对沾灰辊上吸附的灰尘进行刷除;
13、在清扫辊一移动时,清扫辊一顶端刮板块移动,可以对运输箱顶部前端和后端内壁进行清扫,防止拐角积尘,同时在刮板块移动时,带动与运输箱顶部内壁接触的清扫辊二旋转,进而使清扫辊二在旋转时对运输箱顶部内壁进行清扫工作,可以对运输箱顶部内壁进行清扫工作,同时在清扫辊一移动时,带动底部移动刮板移动,可以使移动刮板对运输箱底部内壁堆积的灰尘进行推送,同时可以对运输箱底部内壁上的灰尘进行刮除;
14、通过打开防护箱内的滚珠风扇,可以将防护箱右侧空气吸入,并通过通风槽将空气吹送至运输箱内,可以对运输箱内壁上扫除的灰尘进行吹除,防止运输箱内壁上堆尘,可以使清扫效果更好。
技术特征:
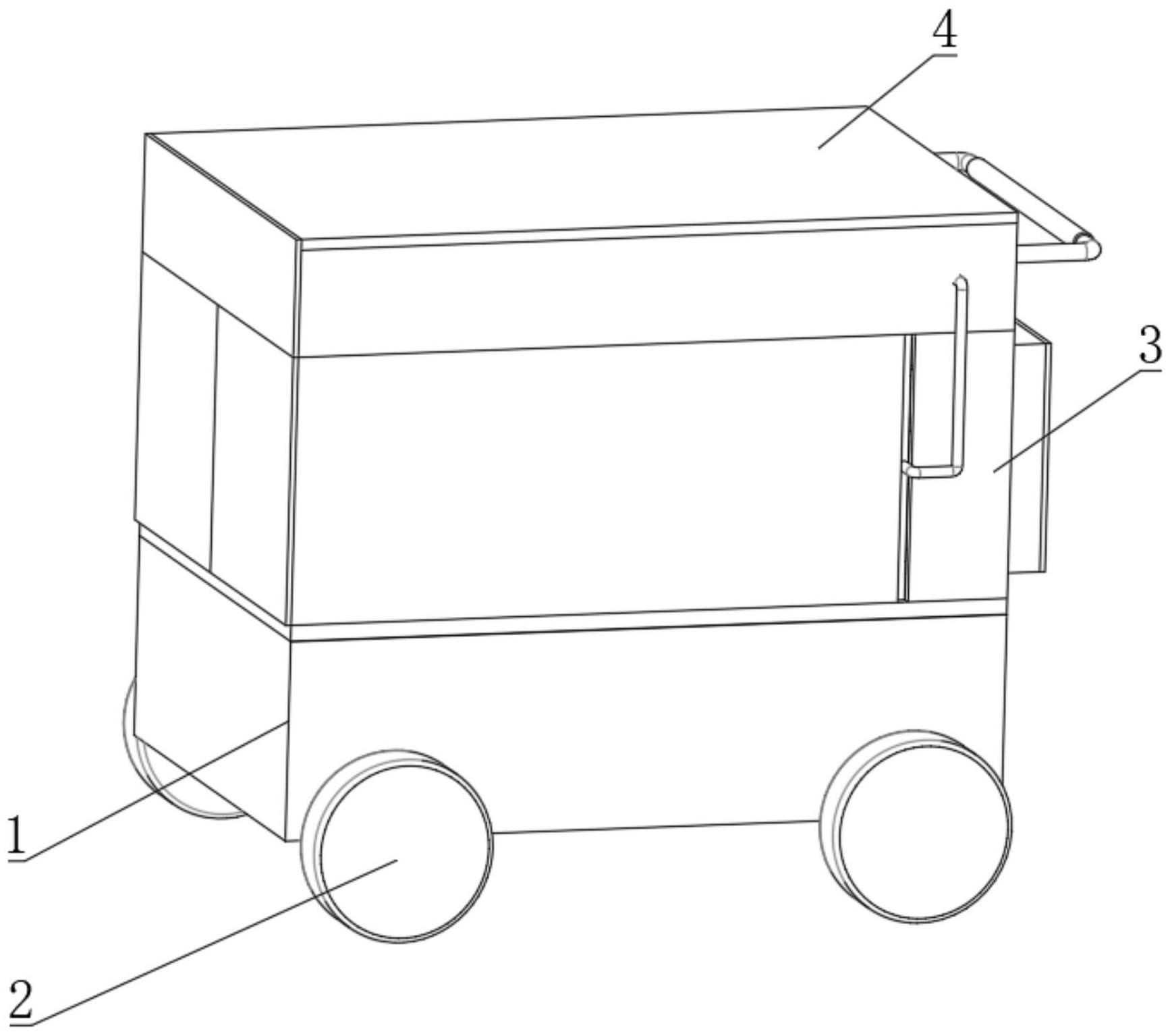
1.一种自动运输机器人,包括移动底座(1),其特征在于:所述移动底座(1)底部设置有移动轮(2),所述移动底座(1)顶部固定连接有运输箱(3),所述运输箱(3)顶部固定连接有调节箱(4),所述调节箱(4)内设置有封闭机构(5),所述移动底座(1)内设置有移位机构(6),所述运输箱(3)内设置有清扫机构(7)和刮尘机构(8);
2.根据权利要求1所述的一种自动运输机器人,其特征在于:所述移位机构(6)包括电机(601)、皮带轮一(602)、皮带(603)、皮带轮二(604)、转杆(605)、移动丝杆(606)和滚珠螺母副(607),所述电机(601)固定连接于移动底座(1)内左侧中部,所述电机(601)有输出轴,所述皮带轮一(602)固定连接于电机(601)输出轴,所述皮带(603)前端传动连接于皮带轮一(602),所述皮带轮二(604)传动连接于皮带(603)后端,所述转杆(605)固定连接于皮带轮二(604)中心,所述移动丝杆(606)固定连接于转杆(605)右端,所述滚珠螺母副(607)螺纹连接于移动丝杆(606)。
3.根据权利要求2所述的一种自动运输机器人,其特征在于:所述清扫机构(7)包括移动板(701)、移动底板(702)、定位环(703)、清扫辊一(704)、刮板块(705)和清扫辊二(706),所述移动板(701)固定连接于滚珠螺母副(607)正面,所述移动底板(702)固定连接于移动板(701)顶部,所述定位环(703)固定连接于移动底板(702)背面,所述清扫辊一(704)转动连接于定位环(703)中部,所述刮板块(705)转动连接于清扫辊一(704)顶端,所述清扫辊二(706)转动连接于刮板块(705)正面。
4.根据权利要求3所述的一种自动运输机器人,其特征在于:所述刮尘机构(8)包括防护箱(801)、滚珠风扇(802)、移动刮板(803)、防护框(804)和刮尘块(805),所述防护箱(801)固定连接于运输箱(3)右侧,所述滚珠风扇(802)设置于防护箱(801)内左侧,所述移动刮板(803)转动连接于清扫辊一(704)底端,所述防护框(804)固定连接于移动刮板(803)顶部后端,所述刮尘块(805)固定连接于运输箱(3)内正面右侧。
5.根据权利要求4所述的一种自动运输机器人,其特征在于:所述运输箱(3)正面和背面均开设有容纳移动挡板一(504)移动的矩形槽,所述刮尘块(805)右侧抵接移动挡板一(504)左侧,所述移动底座(1)顶部开设有容纳移动挡板二(508)移动的收纳槽。
6.根据权利要求5所述的一种自动运输机器人,其特征在于:所述转杆(605)左端转动连接移动底座(1)左侧内壁,所述移动丝杆(606)靠近左右两端均设置有限位环,所述移动丝杆(606)右端转动连接移动底座(1)右侧内壁。
7.根据权利要求6所述的一种自动运输机器人,其特征在于:所述防护框(804)背面右侧后端固定连接有固定架,固定架中部转动连接有沾灰辊,沾灰辊背面滑动连接运输箱(3)背面内壁。
8.根据权利要求7所述的一种自动运输机器人,其特征在于:所述皮带(603)、皮带轮二(604)、转杆(605)、移动丝杆(606)和滚珠螺母副(607)数量均为两个,两个所述皮带(603)、皮带轮二(604)、转杆(605)、移动丝杆(606)和滚珠螺母副(607)对称分布在电机(601)正面和背面,所述移动底座(1)底部中间开设有漏灰槽。
9.根据权利要求8所述的一种自动运输机器人,其特征在于:所述防护箱(801)左侧、防护箱(801)右侧和运输箱(3)右侧在同一水平线上均开设有相连通的通风槽。
技术总结
本发明涉及物流运输技术领域,且公开了一种自动运输机器人,包括移动底座,移动底座顶部固定连接有运输箱,运输箱顶部固定连接有调节箱,调节箱内设置有封闭机构,移动底座内设置有移位机构,运输箱内设置有清扫机构和刮尘机构,封闭机构包括固定板、液压伸缩杆一、连接杆一、移动挡板一、定位板、液压伸缩杆二、连接杆二和移动挡板二;本发明,当需要对运输箱内壁进行清扫时,通过使用电机,使清扫辊一对运输箱正面和背面内壁进行清扫,随后通过设置在防护框背面的沾灰辊,对运输箱内壁上残留的灰尘进行粘除,随着清扫辊一在移动时旋转,可以使清扫辊一上的毛刷接触沾灰辊,可以对沾灰辊上吸附的灰尘进行刷除。
技术研发人员:孙章炯
受保护的技术使用者:武汉普罗尔物流有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!