双足行走机器人踝关节平衡补偿机构的制作方法
本发明涉及仿人机器人,具体涉及一种双足行走机器人踝关节平衡补偿机构。
背景技术:
1、双足行走仿人机器人的动态平衡能力直接体现机器人的研发水平。在现有的仿人机器人中大多是通过传感器检测机器人的姿态,经控制系统的算法计算,对身体各个执行机构发送操作指令,进而对机器人身体进行平衡调整。该方式虽然可以有效解决平衡问题,但由于检测传感器检测,控制系统运算发送指令,执行机构执行都需要时间,瞬时性较差。
2、躯体相对僵直是机器人的通病,在凹凸不平的路况或是突然踩到异物的情况下,如果踝关节没能及时做出平衡调整则会直接导致躯体失去平衡,需要进行平衡调整。另外踝关节位置的平衡补偿能力对其他姿态下的躯体的平衡调整起到非常重要的作用。
3、公开于该背景技术部分的信息仅仅旨在增加对本发明的总体背景的理解,而不应当被视为承认或以任何形式暗示该信息构成已为本领域一般技术人员所公知的现有技术。
技术实现思路
1、为克服现有技术所存在的缺陷,现提供一种双足行走机器人踝关节平衡补偿机构,以解决现有的仿人机器人通过传感器检测姿态再经过算法计算来调节平衡有延时性的问题。
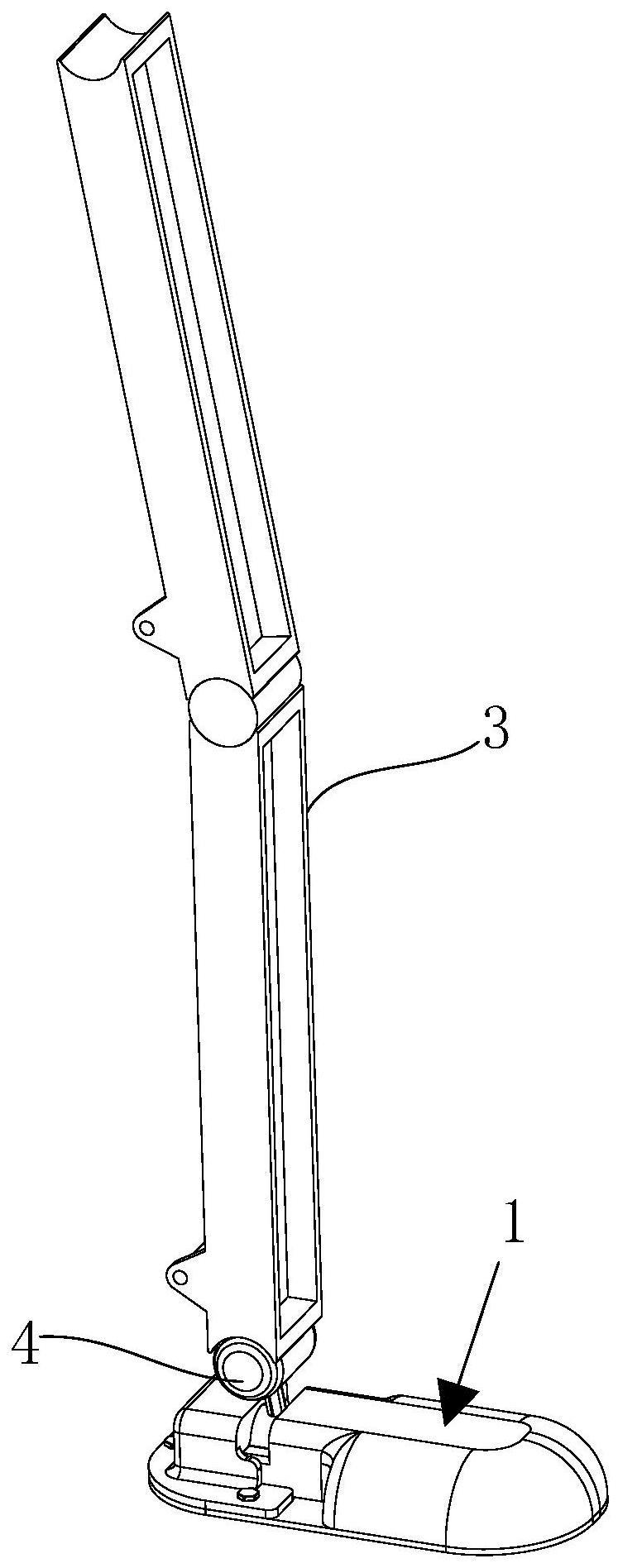
2、为实现上述目的,提供一种双足行走机器人踝关节平衡补偿机构,包括:
3、脚掌组件,所述脚掌组件的内部形成有容置空腔,所述容置空腔与所述脚掌组件同向设置,所述脚掌组件的上部形成有连通于所述容置空腔的条形孔,所述条形孔与所述容置空腔呈角度设置;
4、被动件,可转动地所述容置空腔中;
5、小腿组件,竖向设置于所述条形孔的上方;
6、连接件,所述连接件具有相对的第一端和第二端,所述连接件的第一端通过驱动件可翻转地安装于所述小腿组件的下端,所述连接件的第二端可活动地穿设于所述条形孔中且连接于所述被动件。
7、进一步的,所述容置空腔沿所述脚掌组件的长度方向设置。
8、进一步的,所述容置空腔设置于所述脚掌组件的中部。
9、进一步的,所述条形孔沿所述脚掌组件的宽度方向设置。
10、进一步的,所述脚掌组件包括:
11、支撑板,所述支撑板具有相对的脚掌端和脚跟端,所述脚跟端形成有缺口,所述缺口的侧壁形成有一承插孔,所述承插孔沿所述支撑板的长度方向设置;
12、盖板,所述盖板可拆卸地安装于所述缺口的后端中,所述盖板的底部形成有限位槽,所述限位槽与所述承插孔同轴设置,所述限位槽的端部连通于所述缺口,所述被动件具有相对的一前端和一后端,所述被动件的后端可转动地插设于所述限位槽中,所述被动件的前端可转动地插设于所述承插孔中,所述连接件的第二端连接于所述被动件的中部。
13、进一步的,所述盖板的外沿形成有贴合于所述缺口的内壁的锁附翼缘,所述锁附翼缘通过紧固件可拆卸地连接于所述缺口的内壁。
14、进一步的,所述被动件呈圆柱形,所述承插孔的孔壁呈弧形,所述承插孔的孔壁的弧度适配于所述被动件的圆周面的弧度。
15、进一步的,所述驱动件为电动舵机,所述电动舵机的舵盘连接于所述连接件的第一端。
16、进一步的,所述舵盘设置于所述小腿组件的下端的端面的轴心处。
17、本发明的有益效果在于,本发明的双足行走机器人踝关节平衡补偿机构,通过驱动件翻转连接件以令脚掌组件的前端向上翻转或向下翻转,进而模拟人类脚掌的上翻和下翻。另一方面,连接件的中部在条形孔中滑移,即连接件沿脚掌组件的宽度方向摇摆。所以,本发明的双足行走机器人踝关节平衡补偿机构在仿人机器人踝关节位置只设置一个驱动件的条件下,就能实现该位置的两个自由度,相较于通过增加输出装置增加的自由度,本发明的双足行走机器人踝关节平衡补偿机构结构简洁,脚掌组件在其宽度方向上的自由度为被动自由度,能实时进行自行进行角度调整,有利于躯体的平衡调整,提高机器人平衡调整的效率,增加该自由度提高了机器人的灵活性,在行走或是其他动作时协调,更加自然。
技术特征:
1.一种双足行走机器人踝关节平衡补偿机构,其特征在于,包括:
2.根据权利要求1所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述容置空腔沿所述脚掌组件的长度方向设置。
3.根据权利要求2所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述容置空腔设置于所述脚掌组件的中部。
4.根据权利要求3所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述条形孔沿所述脚掌组件的宽度方向设置。
5.根据权利要求1所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述脚掌组件包括:
6.根据权利要求5所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述盖板的外沿形成有贴合于所述缺口的内壁的锁附翼缘,所述锁附翼缘通过紧固件可拆卸地连接于所述缺口的内壁。
7.根据权利要求5所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述被动件呈圆柱形,所述承插孔的孔壁呈弧形,所述承插孔的孔壁的弧度适配于所述被动件的圆周面的弧度。
8.根据权利要求1所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述驱动件为电动舵机,所述电动舵机的舵盘连接于所述连接件的第一端。
9.根据权利要求8所述的双足行走机器人踝关节平衡补偿机构,其特征在于,所述舵盘设置于所述小腿组件的下端的端面的轴心处。
技术总结
本发明公开了一种双足行走机器人踝关节平衡补偿机构,包括:脚掌组件,所述脚掌组件的内部形成有容置空腔,所述容置空腔与所述脚掌组件同向设置,所述脚掌组件的上部形成有连通于所述容置空腔的条形孔,所述条形孔与所述容置空腔呈角度设置;被动件,可转动地所述容置空腔中;小腿组件,竖向设置于所述条形孔的上方;连接件,所述连接件具有相对的第一端和第二端,所述连接件的第一端通过驱动件可翻转地安装于所述小腿组件的下端,所述连接件的第二端可活动地穿设于所述条形孔中且连接于所述被动件。本发明解决了现有的仿人机器人通过传感器检测姿态再经过算法计算来调节平衡有延时性的问题。
技术研发人员:王磊,舒斌
受保护的技术使用者:上海清宝引擎机器人有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!