多功能重载钢丝绳攀爬机器人及其使用方法
本发明属于矿井提升装备,具体涉及一种多功能重载钢丝绳攀爬机器人。
背景技术:
1、钢丝绳承载力强、柔韧性能好和抗拉强度高等特点,在港口起重、矿井提升、索道运输、电梯、吊桥等行业有着广泛的应用。由于实际工况需求,常常需要攀爬机器人在钢丝绳进行勘测、检测、除尘和涂油等工作,根据攀爬机器人工作用途不同,对机器人的运行速度、负载能力和平稳性有着较高的要求。现有钢丝绳攀爬机器人依据其攀爬方向包括钢丝绳轴向攀爬和钢丝绳捻向攀爬,如专利公开号为cn113428252b的缆索攀爬机器人,通过沿缆索周向均匀布置两组行走机构使机器人沿钢丝绳轴向移动,具有运行速度快等优势。如专利公开号为cn109969279a的钢丝绳捻向攀爬机器人,通过与钢丝绳股的直径相同的圆弧型滚轮沿着股在钢丝绳中捻制的螺旋线方向进行移动,具有运行平稳等优势。
2、然而,上述钢丝绳攀爬机器人在工作时,还会面临如下问题:第一,对于重载工况,如对钢丝绳进行涂油工作,不仅需要携带涂油设备,还需要储备一定的润滑剂,因此需要机器人满足重负载攀爬这一工况。第二,由于钢丝绳在捻制方向包括左捻、右捻、交互捻等多种情况,因此需要攀爬机器人具有一定的攀爬角度调节功能,提高机器人对不同捻向和规格钢丝绳的通用性。第三,考虑到实际工况,需要对钢丝绳的勘测、检测、除尘和涂油等工作,而不同工作对机器人运行速度、负载能力和平稳性有着不同要求,因此机器人在满足攀爬的同时,还需考虑不同工作的运行条件。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的实施例提出一种多功能重载钢丝绳攀爬机器人。
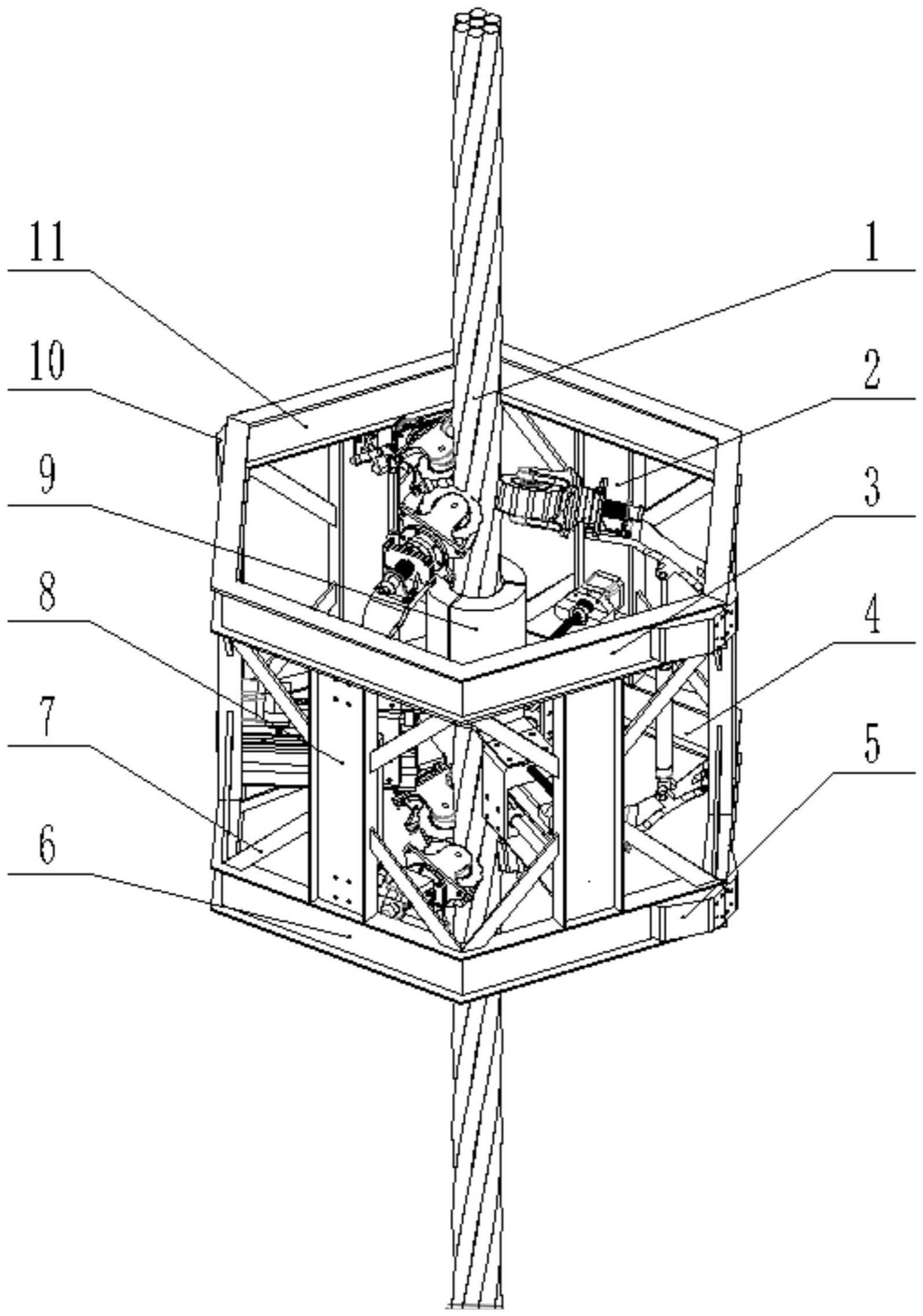
2、根据本发明实施例的多功能重载钢丝绳攀爬机器人,包括:框架,所述框架包括相对设置地两组机架,每组所述机架上均设置有三个支撑钢架,张紧装置,所述张紧装置有三组,每组所述张紧装置设在其中一个所述支撑钢架上;转向分度调节装置,所述转向分度调节装置的一侧与所述张紧装置连接;驱动装置,所述驱动装置与所述转向分度调节装置上远离所述张紧装置的一侧相连接;功能搭载装置,所述功能搭载装置有三个,每个所述功能搭载装置设置在一个所述支撑钢架上,三个所述功能搭载装置与三组所述张紧装置交替地设在六个所述支撑钢架上。
3、根据本发明实施例的多功能重载钢丝绳攀爬机器人,通过转向分度调节装置可以使机器人适应不同捻向和规格的钢丝绳,通过张紧装置和电动推杆实现机器人对不同直径钢丝绳的抱紧,通过驱动装置实现机器人在反捻向上的重载攀爬,通过功能搭载装置选择不同的功能,机器人可以实现在钢丝绳上进行勘测、检测、除尘、涂油等作业。
4、可选地,两组所述机架之间由开合铰页和电磁锁连接,两组所述机架组成六棱柱形状的框架。
5、可选地,每组所述张紧装置包括两个张紧支臂,两个所述张紧支臂的同一端均通过销钉一分别与同一个所述支撑钢架的两端转动连接。
6、可选地,所述张紧装置进一步包括电动推杆,所述电动推杆的两端分别通过一个销钉二与两个所述张紧支臂转动连接。
7、可选地,两个所述张紧支臂的另一端均设置有弹簧限位支座和移动滑台,所述弹簧限位支座与所述移动滑台之间设置弹簧,张紧螺栓贯穿所述弹簧并与所述移动滑台连接,所述移动滑台还与所述转向分度调节装置连接。
8、可选地,所述转向分度调节装置包括固定底座,所述固定底座的一侧与所述移动滑台连接,所述固定底座的另一侧通过轴承与旋转台转动连接,所述旋转台的外周面上设置有转向调节手柄,所述旋转台上远离所述固定底座的一侧与所述驱动装置连接,所述旋转台与所述固定底座之间还设置有锁紧块,所述锁紧块具有沿着所述锁紧块周向设置的环形凹槽,所述固定底座上设有螺栓通孔,锁紧旋钮与所述螺栓通孔及所述环形凹槽相配合。
9、可选地,所述旋转台具有锁紧状态和活动状态,处于所述锁紧状态的所述旋转台与所述固定底座锁紧且所述锁紧旋钮穿过所述螺栓通孔与所述环形凹槽相配合,处于所述活动状态的所述旋转台与所述固定底座转动连接,且所述锁紧旋钮脱离所述环形凹槽。
10、可选地,所述驱动装置包括滚轮支撑座,所述滚轮支撑座通过连接法兰与所述旋转台连接,所述滚轮支撑座中设置有轮毂电机,所述轮毂电机与所述滚轮支撑座上的轮轴转动连接,所述轮毂电机外部套设有齿轮形滚轮。
11、可选地,所述功能搭载装置包括直线模组支撑架,所述直线模组支撑架的一端固定于其中一个所述支撑钢架上,所述直线模组支撑架的顶部设有直线模组固定台,所述直线模组固定台上设置有支撑座一、支撑座二和电机,所述电机的输出轴通过联轴器与滚珠丝杠的一端连接,所述滚珠丝杠的另一端穿过载物台与所述支撑座一转动连接,所述联轴器设在所述支撑座二上,所述滚珠丝杠与所述载物台之间通过螺纹连接,所述载物台的底部两侧设有直线滑块,所述直线模组支撑架的两侧均设有直线滑轨,所述直线滑块与所述直线滑轨相配合。
12、根据本发明实施例的多功能重载钢丝绳攀爬机器人的使用方法,包括以下步骤:
13、(1)机器人安装:所述电磁锁通电打开,使所述框架以所述开合铰页为转动中心打开,将多功能重载钢丝绳攀爬机器人放在钢丝绳上后,通过所述电磁锁断电闭合,实现所述框架闭合;
14、(2)机器人攀爬方向调节:首先转动所述锁紧旋钮,使所述锁紧旋钮前端锥形与所述环形凹槽分离,所述旋转台由所述锁死状态变为所述活动状态,然后依据所述钢丝绳的捻向和所需功能对攀爬方向角度进行调节,转动所述转向调节手柄来调节到合适的攀爬方向,最后反向转动所述锁紧旋钮,使所述锁紧旋钮前端锥形挤压所述锁紧块的所述环形凹槽,使所述旋转台由所述活动状态变为所述锁死状态,从而实现多功能重载钢丝绳攀爬机器人攀爬方向的调节;
15、(3)机器人抱紧:启动所述电动推杆,控制所述电动推杆收缩,使所述三组张紧支臂压紧所述钢丝绳,直到三组所述驱动装置的所述齿轮形滚轮能够抱紧所述钢丝绳;
16、(4)机器人功能模块调节:当所述驱动装置完全抱紧所述钢丝绳后,三组所述功能搭载装置的电机启动,通过所述联轴器与所述滚珠丝杠的传动,通过所述直线滑块和所述直线滑轨的配合,使搭载在所述载物台上的设备向所述钢丝绳移动,直到满足所述设备与所述钢丝绳工作的合适距离;
17、(5)机器人攀爬:启动所述驱动装置的所述轮毂电机,通过所述齿轮形滚轮与所述钢丝绳的捻股相啮合而行进。
18、根据本发明实施例的多功能重载钢丝绳攀爬机器人,通过转向分度调节装置可以使机器人适应不同捻向和规格的钢丝绳,通过张紧装置和电动推杆实现机器人对不同直径钢丝绳的抱紧,通过驱动装置实现机器人在反捻向上的重载攀爬,通过功能搭载装置选择不同的功能,机器人可以实现在钢丝绳上进行勘测、检测、除尘、涂油等作业。
技术特征:
1.一种多功能重载钢丝绳攀爬机器人,其特征在于,包括:
2.根据权利要求1所述的多功能重载钢丝绳攀爬机器人,其特征在于,两组所述机架之间由开合铰页和电磁锁连接,两组所述机架组成六棱柱形状的框架。
3.根据权利要求1所述的多功能重载钢丝绳攀爬机器人,其特征在于,每组所述张紧装置包括两个张紧支臂,两个所述张紧支臂的同一端均通过销钉一分别与同一个所述支撑钢架的两端转动连接。
4.根据权利要求3所述的多功能重载钢丝绳攀爬机器人,其特征在于,所述张紧装置进一步包括电动推杆,所述电动推杆的两端分别通过一个销钉二与两个所述张紧支臂转动连接。
5.根据权利要求3所述的多功能重载钢丝绳攀爬机器人,其特征在于,两个所述张紧支臂的另一端均设置有弹簧限位支座和移动滑台,所述弹簧限位支座与所述移动滑台之间设置弹簧,张紧螺栓贯穿所述弹簧并与所述移动滑台连接,所述移动滑台还与所述转向分度调节装置连接。
6.根据权利要求5所述的多功能重载钢丝绳攀爬机器人,其特征在于,所述转向分度调节装置包括固定底座,所述固定底座的一侧与所述移动滑台连接,所述固定底座的另一侧通过轴承与旋转台转动连接,所述旋转台的外周面上设置有转向调节手柄,所述旋转台上远离所述固定底座的一侧与所述驱动装置连接,所述旋转台与所述固定底座之间还设置有锁紧块,所述锁紧块具有沿着所述锁紧块周向设置的环形凹槽,所述固定底座上设有螺栓通孔,锁紧旋钮与所述螺栓通孔及所述环形凹槽相配合。
7.根据权利要求6所述的多功能重载钢丝绳攀爬机器人,其特征在于,所述旋转台具有锁紧状态和活动状态,处于所述锁紧状态的所述旋转台与所述固定底座锁紧且所述锁紧旋钮穿过所述螺栓通孔与所述环形凹槽相配合,处于所述活动状态的所述旋转台与所述固定底座转动连接,且所述锁紧旋钮脱离所述环形凹槽。
8.根据权利要求6所述的多功能重载钢丝绳攀爬机器人,其特征在于,所述驱动装置包括滚轮支撑座,所述滚轮支撑座通过连接法兰与所述旋转台连接,所述滚轮支撑座中设置有轮毂电机,所述轮毂电机与所述滚轮支撑座上的轮轴转动连接,所述轮毂电机外部套设有齿轮形滚轮。
9.根据权利要求1所述的多功能重载钢丝绳攀爬机器人,其特征在于,所述功能搭载装置包括直线模组支撑架,所述直线模组支撑架的一端固定于其中一个所述支撑钢架上,所述直线模组支撑架的顶部设有直线模组固定台,所述直线模组固定台上设置有支撑座一、支撑座二和电机,所述电机的输出轴通过联轴器与滚珠丝杠的一端连接,所述滚珠丝杠的另一端穿过载物台与所述支撑座一转动连接,所述联轴器设在所述支撑座二上,所述滚珠丝杠与所述载物台之间通过螺纹连接,所述载物台的底部两侧设有直线滑块,所述直线模组支撑架的两侧均设有直线滑轨,所述直线滑块与所述直线滑轨相配合。
10.一种根据权利要求1-9任意一项所述的多功能重载钢丝绳攀爬机器人的使用方法,其特征在于,包括以下步骤:
技术总结
本发明公开了一种多功能重载钢丝绳攀爬机器人,包括:框架、张紧装置、转向分度调节装置、驱动装置和功能搭载装置,框架包括两组机架,每组机架上均设置有三个支撑钢架;转向分度调节装置的一侧与张紧装置连接;驱动装置与转向分度调节装置另一侧相连接;三个所述功能搭载装置与三组张紧装置交替地设在六个所述支撑钢架上。本发明实施例的多功能重载钢丝绳攀爬机器人,通过转向分度调节装置可以使机器人适应不同捻向和规格的钢丝绳,通过张紧装置和电动推杆实现机器人对不同直径钢丝绳的抱紧,通过驱动装置实现机器人在反捻向上的重载攀爬,通过功能搭载装置选择不同的功能,机器人可以实现在钢丝绳上进行勘测、检测、除尘、涂油等作业。
技术研发人员:许钟奇,杨建华,黄升平,王亮,沈萌恩,陈明辉,田丰,王重秋,赵安吉
受保护的技术使用者:中国矿业大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!