双轮车的自平衡系统及可摆动动量轮平衡调节方法
本发明涉及机器人研究领域,特别涉及一种双轮车的自平衡系统及可摆动动量轮平衡调节方法。
背景技术:
1、双轮车是一种典型的非线性不稳定系统,并且具有对称性以及侧向不稳定性,因此如何控制双轮车系统的平衡一直是机器人研究领域的难题,因此国内外学者针对双轮车的自平衡系统及平衡调节方法进行了大量且长期的工作与研究探索,并取得了大量的成果。
2、在相关现有技术中,通过在双轮车车身的某一固定位置安装动量轮来解决双轮车的自平衡问题。当双轮车车身发生倾斜时,电机驱动动量轮加速或减速转动,产生回复力,以达到平衡的目的。
3、然而,由于动量轮所能提供的回复力十分有限,当双轮车的重心发生动态变化或受到较大外力扰动时,上述方法产生的回复力无法使得车体恢复平衡。
技术实现思路
1、本发明的目的在于提供一种双轮车的自平衡系统及可摆动动量轮平衡调节方法,以解决上述背景技术中提出的应对双轮车的重心发生动态变化或受到较大外力扰动时,产生的回复力无法使得车体恢复平衡的问题。
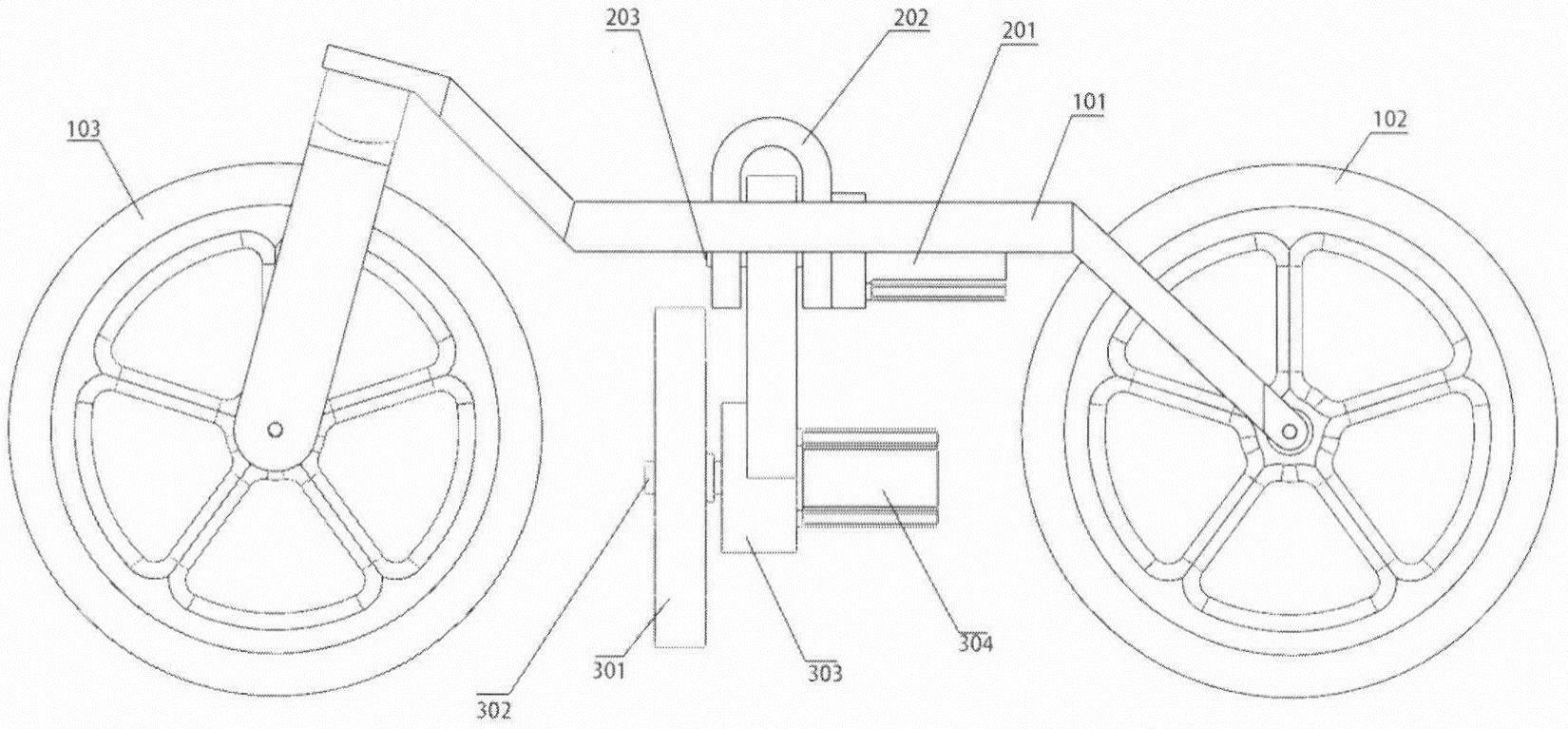
2、为实现上述目的,本发明提供如下技术方案:一种双轮车的自平衡系统,其特征在于,所述自平衡系统包括:基础组件、摆动组件、动量轮组件和控制组件。
3、所述基础组件包括:车身和车轮。
4、所述摆动组件包括:摆动电机、摆动支架和摆动轴。
5、所述动量轮组件包括:动量轮、动量轮轴、动量轮支架和动量轮电机。
6、所述控制组件包括:微控制单元和陀螺仪。
7、所述摆动轴与所述动量轮支架固定连接,所述摆动支架与所述车身固定连接。
8、其中,所述陀螺仪安装与车身并可以获得所述车身的实时运动数据,所述微控制单元可以通过读取所述陀螺仪数据解算出所述车身的倾斜角度、倾斜角速度与倾斜角加速度,并根据情况控制电机。
9、一方面,所述动量轮轴沿车身前后方向设置,所述动量轮可以在所述动量轮电机的带动下旋转。
10、另一方面,所述摆动轴沿车身前后方向设置,因所述动量轮支架与所述摆动轴固定连接,所以所述动量轮组件可以在所述摆动电机的带动下旋转并保持在某一位置。
11、优选的,所述动量轮组件包括:动量轮、动量轮轴、动量轮支架、动量轮支架轴承、动量轮联轴器和动量轮电机。所述动量轮与所述动量轮轴套接,所述动量轮轴与所述动量轮支架轴承套接,所述动量轮支架轴承固定于所述动量轮支架下部的孔中,所述动量轮电机与所述动量轮支架固定连接,所述动量轮电机的输出轴与所述动量轮联轴器的一端连接,所述动量轮联轴器的另一端与所述动量轮轴连接。
12、优选的,所述摆动组件包括:摆动轴、摆动支架、摆动支架前部轴承、摆动支架后部轴承、摆动联轴器和摆动电机。所述摆动支架为倒u型支架,所述摆动支架前部轴承固定于所述摆动支架前部,所述摆动支架后部轴承固定于所述摆动支架后部,所述摆动轴的前端与所述摆动支架前部轴承套接,所述摆动轴的后端与所述摆动支架后部轴承套接,所述摆动电机与所述摆动支架固定连接,所述摆动电机的输出轴与摆动联轴器的一端连接,所述摆动联轴器的另一端与所述摆动轴连接。
13、本申请实施例提供一种可摆动动量轮平衡调节方法,所述方法用于对上述双轮车的自平衡系统进行调节,所述方法包括:
14、下文所述的第一方向为双轮车左方向或右方向,第二方向与第一方向相反。若第一方向为双轮车左方向,则第二方向为双轮车右方向;若第一方向为双轮车右方向,则第二方向为双轮车左方向。
15、在静止的、没有外力干扰的状态下,所述动量轮组件与所述车身均垂直于地面,所述车身在所述动量轮的运作下保持平衡,此时若所述车身受到第一方向的外力扰动,则通过所述微控制单元的调节方法,控制所述动量轮加速或减速旋转产生第二方向的回复力,使所述车身恢复平衡。
16、在静止状态下,若在所述车身侧面挂载重物,重心则向第一方向偏移,所述车身在所述动量轮的运作下达到新的平衡,在新的平衡状态下所述车身是向第二方向倾斜的,此时,在所述摆动电机的驱动下,将所述动量轮缓慢向第二方向转动,所述车身缓慢向第一方向回正,直到所述车身重新垂直于地面,所述摆动电机停止转动并保持在这一位置。
17、与现有技术相比,本发明的有益效果是:动量轮在提供回复力的同时,与摆动组件结合,充当可以移动的平衡配重块,更加有效的处理车身因外力影响而改变重心的情况。
技术特征:
1.一种双轮车的自平衡系统,其特征在于,
2.根据权利要求1所述的自平衡系统,其特征在于,
3.根据权利要求1所述的自平衡系统,其特征在于,
4.根据权利要求1所述的自平衡系统,其特征在于,
5.根据权利要求1所述的自平衡系统,其特征在于,
6.一种可摆动动量轮平衡调节方法,其特征在于,所述方法用于对权利要求1至5任一项所述的自平衡系统的所述动量轮组件与所述摆动组件进行调节,所述方法包括:
7.一种微控制单元,其特征在于,存储有代码或指令由处理器加载并执行以实现如权利要求6所述的方法。
技术总结
本发明专利公开了一种双轮车的自平衡系统及可摆动动量轮平衡调节方法,自平衡系统包括基础组件、摆动组件、动量轮组件和控制组件,涉及机器人研究领域。所述基础组件包括:车身和车轮;所述摆动组件包括:摆动电机、摆动支架和摆动轴;所述动量轮组件包括:动量轮、动量轮轴、动量轮支架和动量轮电机;所述控制组件包括:微控制单元和陀螺仪。一方面,所述动量轮轴沿车身前后方向设置,所述动量轮可以在所述动量轮电机的带动下旋转。另一方面,所述摆动轴沿车身前后方向设置,因所述动量轮支架与所述摆动轴固定连接,所以所述动量轮组件可以在所述摆动电机的带动下旋转并保持在某一位置。本申请实施例通过动量轮与摆动组件结合,使得动量轮在提供回复力的同时,充当可以移动的平衡配重块,有效处理车身因外力影响而改变重心的情况。
技术研发人员:唐艺立,田莉
受保护的技术使用者:南京航空航天大学金城学院
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!