一种软体机器人
本发明属于机器人,具体涉及一种软体机器人。
背景技术:
1、现阶段,软体机器人已经得到广泛的关注。与其他软体机器人刺激响应的驱动方式相比,电刺激响应驱动方式更直接、更精确、且更可控。
2、研究发现,大多数电刺激驱动软体机器人对环境的适应性较低,只能适用于水平或坡度较小的环境。当在坡度较大环境下的运动能力不足,运动脚因不能根据需要来控制其与环境表面的摩擦力,而存在打滑现象。
3、另外,电刺激驱动软体机器人需要由5kv以上的高压电来驱动。通常,所供应的高压电由笨重的高压电源提供,这就使得软体机器人使用昂贵且不方便携带。这些都极大限制了机器人的运动范围和实际应用。
技术实现思路
1、针对现有技术中当在坡度较大环境下的运动能力不足,运动脚因不能根据需要来控制其与环境表面的摩擦力,而存在打滑现象,以及软体机器人所供应的高压电由笨重的高压电源提供,这就使得软体机器人使用昂贵且不方便携带,极大限制了机器人的运动范围和实际应用的问题,提供了一种软体机器人。
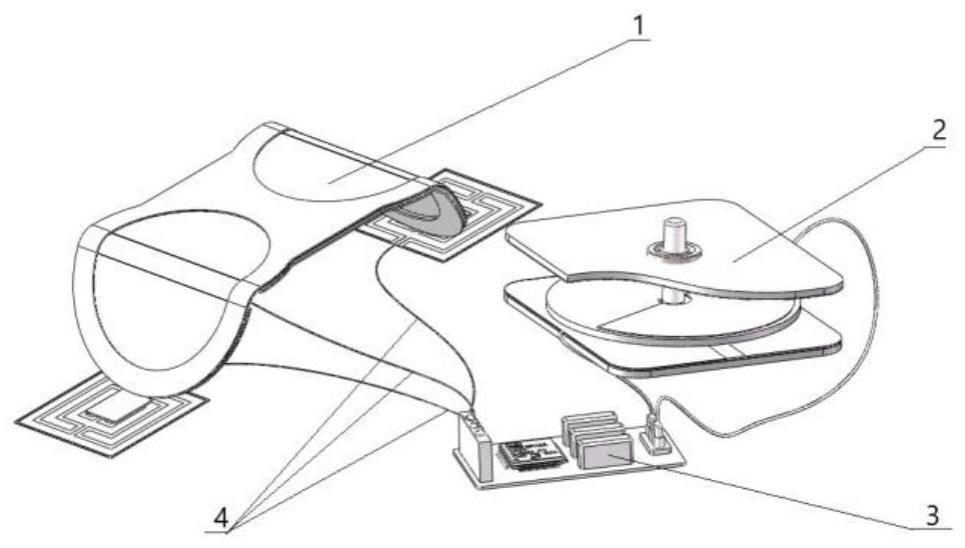
2、一种软体机器人,包括机体和摩擦电脚,摩擦电脚设置于机体上,摩擦电脚包括两层聚酰亚胺薄膜和一层叉指电极,上下两层聚酰亚胺薄膜包裹中间的铜叉指电极。
3、其中,所述软体机器人,所述机体为软伸长机体由柔性亚克力框架板、介电弹性材料、泡棉基材双面胶和下支撑板由上到下按照顺序组装粘接在一起,
4、柔性亚克力框架呈细长的板子形状,当自由状态下为弯曲状态,其具有一定的弹性,
5、其中,下支撑板由三块分开板组成,三块板包括一块横板和两个端板,
6、介电弹性材料两侧涂有柔顺的导电碳脂。
7、其中,所述软体机器人,其通过多路高压摩擦纳米发电机供应高压电,所述多路高压摩擦纳米发电机由中间的一个转子、两端的两个独立定子和电机轴组成,两个定子固定平行设置,电机轴可转动的设置于两个定子上,转子固定设置于电机轴上,并位于两个定子之间的位置。
8、其中,所述软体机器人,转子由聚氯乙烯薄膜和圆形基板组成,
9、将聚氯乙烯膜裁切为半圆形,将两张半圆形聚氯乙烯薄膜分别粘贴在圆形基板的两面;
10、定子由纸、铜电极和圆板组成,纸作为正摩擦材料,将纸固定在铜电极表面;铜电极安装在圆板上。
11、本发明的有益效果:
12、1.采用可控锚固手段的摩擦电脚,使机器人可以在坡度较大的环境中正常运动;
13、2.采用摩擦电供能方式,大大简化了高压电供应设备,使机器的移动更加方便、便捷;
14、通过摩擦纳米发电机技术捕捉外界能量,并将其直接转化为高压电能,降低了传统高压电的获取成本,提高了实用性;多路高压摩擦纳米发电机所产生的高压电,经多路摩擦电控制模块处理后可供应给摩擦电软体机器人。
技术特征:
1.一种软体机器人,其特征在于,包括机体和摩擦电脚(15),摩擦电脚(15)设置于机体上,摩擦电脚(15)包括两层聚酰亚胺薄膜(21)和一层叉指电极(22),上下两层聚酰亚胺薄膜(21)包裹中间的铜叉指电极(22)。
2.如权利要求1所述的软体机器人,其特征在于,所述机体为软伸长机体(14)由柔性亚克力框架板(20)、介电弹性材料(17)、泡棉基材双面胶(19)和下支撑板(18)由上到下按照顺序组装粘接在一起,
3.如权利要求1所述的软体机器人,其特征在于,其通过多路高压摩擦纳米发电机供应高压电,所述多路高压摩擦纳米发电机由中间的一个转子(5)、两端的两个独立定子(6)和电机轴(7)组成,两个定子(6)固定平行设置,电机轴(7)可转动的设置于两个定子上,转子(5)固定设置于电机轴(7)上,并位于两个定子(6)之间的位置。
4.如权利要求3所述的软体机器人,其特征在于,转子(5)由聚氯乙烯薄膜(9)和圆形基板(10)组成,
技术总结
本发明公开了一种软体机器人,包括机体和摩擦电脚,摩擦电脚设置于机体上,摩擦电脚包括两层聚酰亚胺薄膜和一层叉指电极,上下两层聚酰亚胺薄膜包裹中间的铜叉指电极,所述机体为软伸长机体由柔性亚克力框架板、介电弹性材料、泡棉基材双面胶和下支撑板由上到下按照顺序组装粘接在一起,柔性亚克力框架呈细长的板子形状,当自由状态下为弯曲状态,其具有一定的弹性,介电弹性材料两侧涂有柔顺的导电碳脂。本发明的有益效果:采用可控锚固手段的摩擦电脚,使机器人可以在坡度较大的环境中正常运动;采用摩擦电供能方式,大大简化了高压电供应设备,使机器的移动更加方便、便捷。
技术研发人员:石运序,刘源
受保护的技术使用者:烟台大学
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!