本发明涉及车辆控制,尤其涉及一种线控转向系统的控制方法、一种线控转向系统的控制装置、一种计算机可读存储介质和一种线控转向系统。
背景技术:
1、直线行驶保持能力是车辆驾驶性能的一个考核指标,具备良好的直行保持能力的车辆可有效缓解驾驶人员的操作强度,提高驾驶舒适性和驾驶安全性。因此,如何保持车辆直行是一个重要的研究方向。
2、目前,线控转向系统由于上下电机角度不同步,或者由于车辆左右胎压、左右悬架不对称等问题,会引起车辆跑偏,可能需要驾驶员始终施加转向力以保持车辆的直行,给用户带来较差的体验感。
技术实现思路
1、本发明旨在至少在一定程度上解决相关技术中的技术问题之一。为此,本发明的第一个目的在于提出一种线控转向系统的控制方法,根据转向机转角确定转角补偿值,并控制转向执行器根据转角补偿值控制转向机转角,能够保证车辆的直线行驶,提升用户驾驶体验。
2、本发明的第二个目的在于提出一种线控转向系统的控制装置。
3、本发明的第三个目的在于提出一种计算机可读存储介质。
4、本发明的第四个目的在于提出一种线控转向系统。
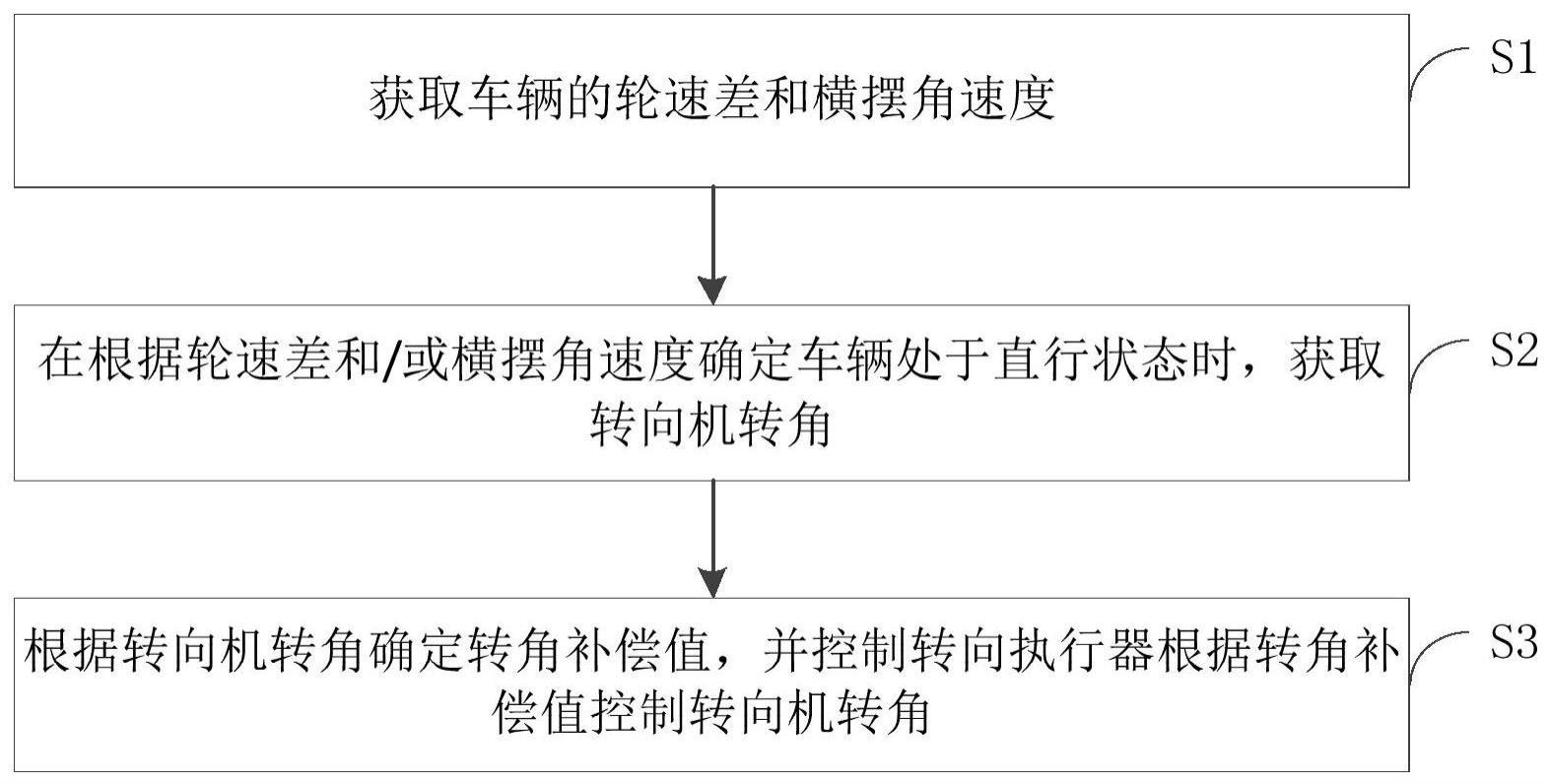
5、为达到上述目的,本发明第一方面实施例提出了一种线控转向系统的控制方法,转向系统包括转向执行器,转向执行器被配置为控制转向机的转角,方法包括:获取车辆的轮速差和横摆角速度;在根据轮速差和/或横摆角速度确定车辆处于直行状态时,获取转向机转角;根据转向机转角确定转角补偿值,并控制转向执行器根据转角补偿值控制转向机转角。
6、根据本发明实施例的线控转向系统的控制方法,首先获取车辆的轮速差和横摆角速度,然后在根据轮速差和/或横摆角速度确定车辆处于直行状态时,获取转向机转角,最后根据转向机转角确定转角补偿值,并控制转向执行器根据转角补偿值控制转向机转角。由此,该方法能够保证车辆的直线行驶,提升用户驾驶体验。
7、另外,根据本发明上述实施例的线控转向系统的控制方法还可以具有如下的附加技术特征:
8、根据本发明的一个实施例,根据转向机转角确定转角补偿值,包括:将转向机转角的相反数确定为转角补偿值。
9、根据本发明的一个实施例,确定车辆处于直行状态,包括:轮速差小于轮速限值,且车辆行驶距离大于或者等于预设距离;或者横摆角速度小于横摆角速度限值,且车辆行驶距离大于或者等于预设距离;或者轮速差小于轮速限值,且横摆角速度小于横摆角速度限值,且车辆行驶距离大于或者等于预设距离。
10、根据本发明的一个实施例,在前轮轮速差小于第一轮速限值,且后轮轮速差小于第二轮速限值时,确定轮速差小于轮速限值。
11、根据本发明的一个实施例,通过以下公式确定第一轮速限值:
12、
13、
14、
15、其中,其中,v′表示第一轮速限值,v1表示左后轮轮速,v2表示右后轮轮速,jr表示后轮轮距,jf表示前轮轮距,α0表示外侧前轮中心与后轮中心到转弯中心之间角度,l表示轴距,rro表示外侧后轮转弯半径,r表示车辆的转弯半径。
16、根据本发明的一个实施例,通过以下公式确定第二轮速限值:
17、
18、
19、
20、其中,v″表示第二轮速限值,v3表示左前轮轮速,v4表示右前轮轮速,jf表示前轮轮距,jr表示后轮轮距,l表示轴距,α0表示外侧前轮中心与后轮中心到转弯中心之间角度,rro表示外侧后轮转弯半径,r表示车辆的转弯半径。
21、根据本发明的一个实施例,通过以下公式获取横摆角速度限值:
22、
23、其中,yr表示横摆角速度限值,v表示车辆的车速,r表示车辆的转弯半径。
24、为达到上述目的,本发明第二方面实施例提出了一种线控转向系统的控制装置,线控转向系统包括转向执行器,转向执行器被配置为控制转向机的转角,装置包括:第一获取模块,用于获取车辆的轮速差;第二获取模块,用于获取车辆的横摆角速度;第三获取模块,用于在根据轮速差和/或横摆角速度确定车辆处于直行状态时,获取转向机转角;控制模块,用于根据转向机转角确定转角补偿值,并控制转向执行器根据转角补偿值控制转向机转角。
25、根据本发明实施例的线控转向系统的控制装置,第一获取模块用于获取车辆的轮速差,第二获取模块用于获取车辆的横摆角速度,第三获取模块用于在根据轮速差和/或横摆角速度确定车辆处于直行状态时,获取转向机转角,控制模块用于根据转向机转角确定转角补偿值,并控制转向执行器根据转角补偿值控制转向机转角。由此,该装置能够保证车辆的直线行驶,提升用户驾驶体验。
26、为达到上述目的,本发明第三方面实施例提出一种计算机可读存储介质,其上存储有线控转向系统的控制程序,该线控转向系统的控制程序被处理器执行时实现上述的线控转向系统的控制方法。
27、根据本发明实施例的计算机可读存储介质,通过执行时实现上述的线控转向系统的控制方法,能够保证车辆的直线行驶,提升用户驾驶体验。
28、为达到上述目的,本发明第四方面实施例提出的一种线控转向系统,包括存储器、处理器及存储在存储器上并可在处理器上运行的线控转向系统的控制程序,处理器执行线控转向系统的控制程序时,实现上述的线控转向系统的控制方法。
29、根据本发明实施例的线控转向系统,通过执行上述的线控转向系统的控制方法,能够保证车辆的直线行驶,提升用户驾驶体验。
30、本发明附加的方面和优点将在下面的描述中部分给出,部分将从下面的描述中变得明显,或通过本发明的实践了解到。
技术特征:1.一种线控转向系统的控制方法,其特征在于,所述转向系统包括转向执行器,所述转向执行器被配置为控制转向机的转角,所述方法包括:
2.根据权利要求1所述的线控转向系统的控制方法,其特征在于,根据所述转向机转角确定转角补偿值,包括:
3.根据权利要求1所述的线控转向系统的控制方法,其特征在于,确定所述车辆处于直行状态,包括:
4.根据权利要求3所述的线控转向系统的控制方法,其特征在于,在前轮轮速差小于第一轮速限值,且后轮轮速差小于第二轮速限值时,确定所述轮速差小于轮速限值。
5.根据权利要求4所述的线控转向系统的控制方法,其特征在于,通过以下公式确定所述第一轮速限值:
6.根据权利要求4所述的线控转向系统的控制方法,其特征在于,通过以下公式确定所述第二轮速限值:
7.根据权利要求3所述的线控转向系统的控制方法,其特征在于,通过以下公式获取所述横摆角速度限值:
8.一种线控转向系统的控制装置,其特征在于,所述线控转向系统包括转向执行器,所述转向执行器被配置为控制转向机的转角,所述装置包括:
9.一种计算机可读存储介质,其特征在于,其上存储有线控转向系统的控制程序,该线控转向系统的控制程序被处理器执行时实现根据权利要求1-7中任一项所述的线控转向系统的控制方法。
10.一种线控转向系统,其特征在于,包括存储器、处理器及存储在存储器上并可在处理器上运行的线控转向系统的控制程序,所述处理器执行所述线控转向系统的控制程序时,实现根据权利要求1-7中任一项所述的线控转向系统的控制方法。
技术总结本发明公开了一种线控转向系统及其控制方法和控制装置、存储介质,所述转向系统包括转向执行器,转向执行器被配置为控制转向机的转角,所述方法包括:获取车辆的轮速差和横摆角速度;在根据轮速差和/或横摆角速度确定车辆处于直行状态时,获取转向机转角;根据转向机转角确定转角补偿值,并控制转向执行器根据转角补偿值控制转向机转角。本发明的控制方法,能够保证车辆的直线行驶,提升用户驾驶体验。
技术研发人员:黄斯亭,屠苏,徐海龙,宋怀文,孟凡坡,夏金龙,杨鹏飞,许挺
受保护的技术使用者:浙江吉利控股集团有限公司
技术研发日:技术公布日:2024/1/13