一种车辆的线控转向系统及其控制方法与流程
本公开实施例涉及汽车,尤其涉及一种车辆的线控转向系统及其控制方法。
背景技术:
1、随着纯电动转向不断发展,乘用车及轻型商用车逐步普及纯电动转向及线控转向技术,但是由于现有纯电转向方案的输出力矩存在技术瓶颈,无法实现技术突破。传统中重型商用车转向系统仍然采用“循环球式转向器+助力油泵+机械杆系”的方式实现动力及运动的传递,整个转向系统杆系较多,借助液压系统提供助力,结构较为复杂,布置也较为困难,零部件数量多,重量大,同时液压系统易泄漏、液压油易被污染的固有特点导致能耗高,故障点较多,转向系统可靠性难以进一步提升。
2、汽车技术向智能化方向发展,现有液压助力转向系统基于结构形式的限制,无法满足智能转向、辅助驾驶等高端功能的拓展,转向系统的电动化、线控化存在较大困难。现有电控液压助力转向系统存在控制精度低、无法“去液压化”等诸多问题;基于自动化程度的不断提升,对汽车转向系统的冗余提出了新的要求,现有转向系统无法满足软件及硬件冗余的要求。
3、在相关技术中,基于麦弗逊悬架的一体化线控独立转向系统适用于断开式前轴,即独立悬架车型,承载较低,无法满足商用车高承载的使用特性。该系统用在独立悬架上,左右轮无关联机械结构,单侧转向失效时,车辆无法控制转向,易造成事故。集成油缸、转向泵以及控制阀组的电控液压转向系统,该方案可实现电控转向,但其采用全液压转向方式,零部件多、结构复杂,且液压系统存在较多泄漏风险点。
4、关于上述的技术方案,发明人发现存在如下问题:相关技术中无法实现在高承载的基础上通过纯电动进行轮边转向;且相关技术中的转向方案由于存在液压助力、转向杆系等结构,从而存在较多的关键零部件种类,制造成本较高;由于左右轮无关联机械结构,单侧转向失效时,车辆无法控制转向,易造成事故。
5、因此,有必要改善上述相关技术方案中存在的一个或者多个问题。
6、需要说明的是,在上述背景技术部分公开的信息仅用于加强对本公开的背景的理解,因此可以包括不构成对本领域普通技术人员已知的现有技术的信息。
技术实现思路
1、本发明的目的在于提供一种车辆的线控转向系统及其控制方法,进而至少解决上述相关技术方案中存在的一个或者多个问题。
2、本发明的目的采用以下技术方案实现:
3、第一方面,本发明提供了一种车辆的线控转向系统,包括:
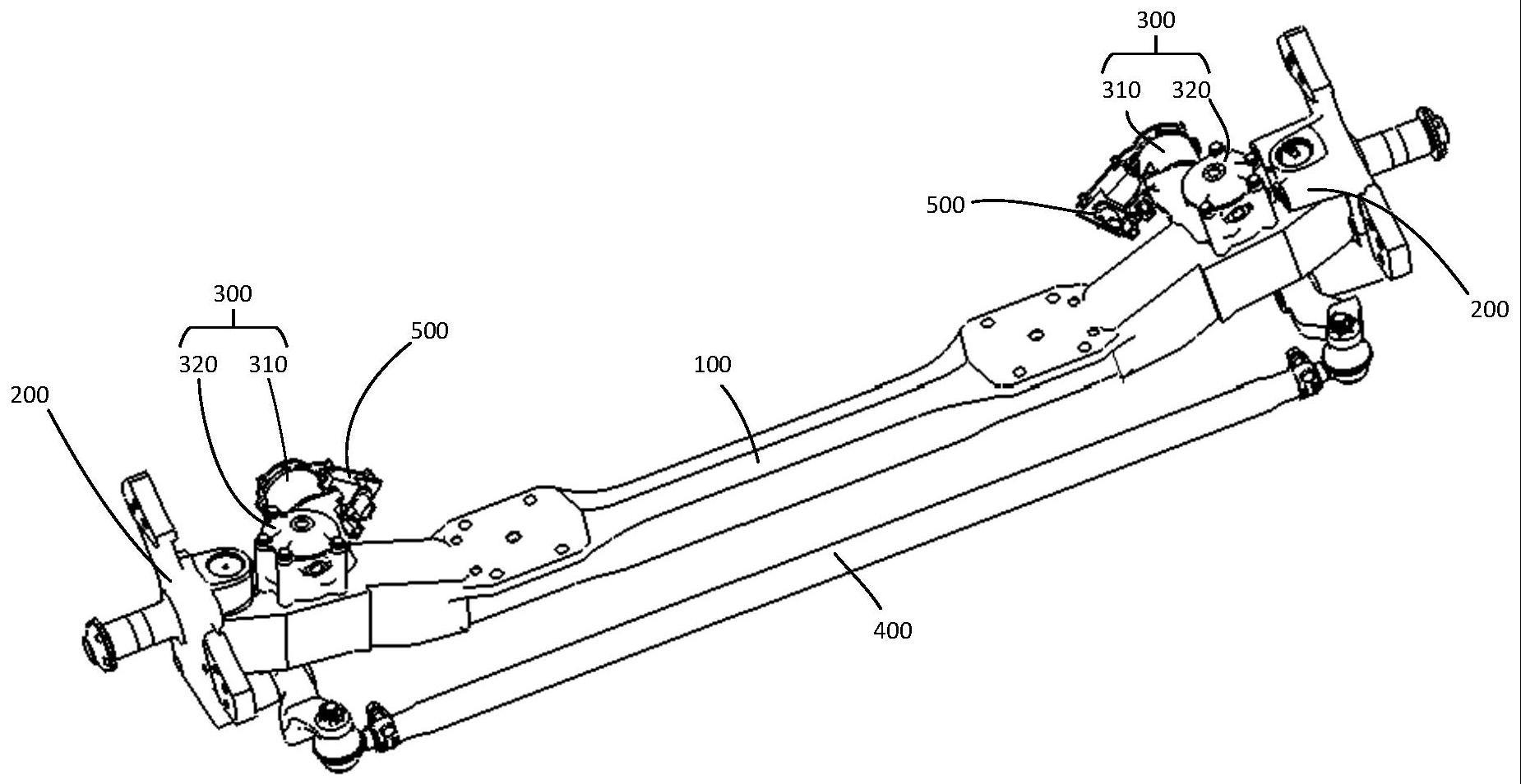
4、支撑梁,所述支撑梁包括两个支撑端部,在每个支撑端部处分别设置有一个用于车辆轮胎的转向节,每个所述转向节能够绕着所述支撑梁的相应的所述支撑端部转动;
5、两个驱动机构,两个所述驱动机构与每个所述转向节一一对应地设置,所述驱动机构包括电力驱动装置和传动装置,所述传动装置连接至所述电力驱动装置并且与所述转向节传动连接,从而在所述电力驱动装置被启用时将由所述电力驱动装置提供的动力传输至所述转向节,以使所述转向节能够转动;
6、连接杆,所述连接杆包括两个连接端部,每个连接端部分别与一个转向节杠杆连接,从而使两个转向节的运动同步。
7、可选地,所述线控转向系统包括:与所述驱动机构一一对应地设置的控制装置,所述控制装置和所述电力驱动装置连接,所述控制装置被配置成响应来自车辆的转向信号而将电力驱动装置启用。
8、可选地,所述传动装置包括:
9、第一传动杆,在所述第一传动杆的上端部同轴地设置有涡轮,在所述第一传动杆的下端部同轴地设置有第一齿轮,所述涡轮与所述电力驱动装置的输出轴通过蜗杆传动连接;
10、第二传动杆,在所述第二传动杆上同轴地设置有第二齿轮,所述第二齿轮与所述第一传动杆的所述第一齿轮传动连接;
11、主销,所述主销与所述转向节固定连接,在所述主销上设置有第三齿轮。所述第三齿轮与所述第二齿轮传动连接。
12、可选地,所述传动装置为行星齿轮组或滚珠丝杠结构。
13、可选地,所述线控转向系统包括:与所述传动装置一一对应地设置的传感器,所述传感器与所述第一传动杆同轴连接,用于通过采集所述传动装置的运动状态以获取所述转向节的转动角度。
14、可选地,所述支撑梁的两个支撑端部分别设置有用于连接所述主销的主销孔,所述主销通过主销轴承连接于所述主销孔处,所述主销轴承的外侧与所述支撑梁主销孔过盈配合,所述主销轴承的内圈与所述主销过盈配合。
15、可选地,所述主销与所述转向节通过花键挡圈固定成一体。
16、可选地,每个所述转向节通过所述连接杆连接成转向梯形结构,且其中任一的所述转向节通过所述连接杆形成的转向梯形结构驱动另一所述转向节进行转动。
17、第二方面,本发明提供了一种车辆的线控转向系统的控制方法,对上述实施例中任一项所述的车辆的线控转向系统进行控制,所述控制方法包括:包括:
18、获取转向节的实时转向状态信息;
19、获取目标转向角度和目标角速度;
20、根据所述目标转向角度、所述目标角速度和所述实时转向状态信息,生成用于控制所述转向节进行转动的控制信号;
21、控制两个电力驱动装置共同响应所述控制信号使两个所述转向节以所述目标角速度转动至所述目标转向角度。
22、可选地,所述根据所述目标转向角度、所述目标角速度和所述实时转向状态信息,生成用于控制所述转向节进行转动的控制信号的步骤,包括:
23、当未检测到任一所述电力驱动装置的故障信号时,控制两个电力驱动装置通过相应的转角关系协同完成转向动作;
24、当检测到任一所述电力驱动装置的故障信号时,生成用于另一所述电力驱动装置的所述转向节的控制信号,控制另一所述电力驱动装置响应所述控制信号使两个所述转向节以所述目标角速度转动至所述目标转向角度。
25、本发明的实施例提供的技术方案可以包括以下有益效果:
26、本发明的实施例中,通过支撑梁支撑两个转向节,从而在高承载的基础上实现纯电动轮边转向;由于去除了液压助力、转向杆系,从而大幅度减少关键零部件种类,降低批量制造成本;通过连接杆使两个转向节的运动同步,从而在单侧转向失效时,使车辆依然能够正常行驶。
27、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本公开。
技术特征:
1.一种车辆的线控转向系统,其特征在于,包括:
2.根据权利要求1所述车辆的线控转向系统,其特征在于,所述线控转向系统包括:与所述驱动机构一一对应地设置的控制装置,所述控制装置和所述电力驱动装置连接,所述控制装置被配置成响应来自车辆的转向信号而将电力驱动装置启用。
3.根据权利要求2所述车辆的线控转向系统,其特征在于,所述传动装置包括:
4.根据权利要求2所述车辆的线控转向系统,其特征在于,所述传动装置为行星齿轮组或滚珠丝杠结构。
5.根据权利要求3所述车辆的线控转向系统,其特征在于,所述线控转向系统包括:与所述传动装置一一对应地设置的传感器,所述传感器与所述第一传动杆同轴连接,用于通过采集所述传动装置的运动状态以获取所述转向节的转动角度。
6.根据权利要求3所述车辆的线控转向系统,其特征在于,所述支撑梁的两个支撑端部分别设置有用于连接所述主销的主销孔,所述主销通过主销轴承连接于所述主销孔处,所述主销轴承的外侧与所述支撑梁主销孔过盈配合,所述主销轴承的内圈与所述主销过盈配合。
7.根据权利要求3所述车辆的线控转向系统,其特征在于,所述主销与所述转向节通过花键挡圈固定成一体。
8.根据权利要求2-7中任一项的所述车辆的线控转向系统,其特征在于,每个所述转向节通过所述连接杆连接成转向梯形结构,且其中任一的所述转向节通过所述连接杆形成的转向梯形结构驱动另一所述转向节进行转动。
9.一种车辆的线控转向系统的控制方法,其特征在于,对权利要求1-8中任一项所述的车辆的线控转向系统进行控制,所述控制方法包括:
10.根据权利要求9所述控制方法,其特征在于,所述根据所述目标转向角度、所述目标角速度和所述实时转向状态信息,生成用于控制所述转向节进行转动的控制信号的步骤,包括:
技术总结
本发明是关于一种车辆的线控转向系统及其控制方法。该系统包括:支撑梁,支撑梁包括两个支撑端部,在每个支撑端部处分别设置有一个转向节,每个转向节能够绕着支撑梁的相应的支撑端部转动;与每个转向节一一对应地设置的驱动机构,驱动机构包括电力驱动装置和传动装置,传动装置连接至电力驱动装置并且与转向节相接合,从而在电力驱动装置被启用时将由电力驱动装置提供的动力传输至转向节,以使转向节能够转动;连接杆,连接杆包括两个连接端部,每个连接端部分别与一个转向节杠杆连接,从而使两个转向节的运动同步。本发明在高承载的基础上实现纯电动轮边转向;减少关键零部件种类,降低制造成本;在单侧转向失效时,使车辆能够正常行驶。
技术研发人员:宋鹏成,李司光,王东斌,王印,卢威
受保护的技术使用者:质子汽车科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!