一种便携式多形态救援机器人单体及机器人
本申请涉及机器人,具体涉及一种便携式多形态救援机器人单体及机器人,特别是涉及用于在复杂灾难环境中进行探测或搜救工作的便携式多形态救援机器人。
背景技术:
1、随着全球工业化的不断发展,仿生移动机器人在社会生产生活中的应用日益广泛。爬行机器人是移动机器人的一种,其可在极端复杂的环境下工作,进而能有效降低人工作业的危险性并提高工作效率,因此,爬行机器人一直是机器人领域的重点研究对象。按照行动的方式可以划分为:足式、履带式、蠕动式、轮式等;爬行机器人对复杂地形环境有着高度的适应性,在灾害救援、军事侦察等领域具有广阔的应用前景。
2、地震、泥石流、塌方等自然灾害长期以来在我国频频发生,由于灾后地区内部的坍塌物结构复杂,在灾后救援中,存在许多风险因素,例如坍塌物的再度坍塌,对于救援人员的心理、体力都存在极大干扰。因此,救援机器人已经成为一个重要的发展方向。
3、近年来,一些仿生机器人已经在灾后救援工作中发挥重要作用,但是同时兼顾多形态和双体配合的机器人尚未出现。
4、因此,亟需提供一种便携式多形态救援机器人单体及机器人,以解决上述技术问题。
技术实现思路
1、鉴于现有技术中的上述缺陷或不足,本申请旨在提供一种便携式多形态救援机器人单体,包括:
2、第一主体平台、第二主体平台、主体连接结构和腿部结构组,所述第一主体平台的一端与所述第二主体平台的一端通过所述主体连接结构枢转连接,所述第一主体平台的另一端的两侧分别铰接一组腿部结构,所述第二主体平台的另一端的两侧分别铰接一组腿部结构。
3、根据本申请实施例提供的技术方案,每组腿部结构包括依次连接的腿部虎克铰、壳腿连杆、大腿连杆和小腿连杆。
4、根据本申请实施例提供的技术方案,所述主体连接结构包括主体虎克铰、主体连接杆和第二压电驱动器,所述第一主体平台的所述一端与所述主体连接杆连接,所述第二主体平台的所述一端与所述主体虎克铰连接,所述主体虎克铰和所述主体连接杆通过所述第二压电驱动器连接。
5、根据本申请实施例提供的技术方案,所述第一主体平台的所述一端通过转动副与主体连接杆连接,所述第二主体平台的所述一端通过第一压电驱动器与主体虎克铰连接。
6、根据本申请实施例提供的技术方案,所述第一主体平台包括壳体、一组摄像组件和两组第三压电驱动器,第一主体平台的壳体外部的一端固定安装摄像组件、另一端通过转动副与主体连接杆相连,第一主体平台的壳体内部的两侧分别通过一组所述第三压电驱动器与对应的腿部结构相连。
7、根据本申请实施例提供的技术方案,所述第二主体平台包括壳体、一组摄像组件、一组第一压电驱动器和两组第三压电驱动器,第二主体平台的壳体外部的一端固定安装摄像组件、另一端通过第一压电驱动器与主体虎克铰相连,第二主体平台的壳体内部的两侧分别通过一组所述第三压电驱动器与对应的腿部结构相连。
8、根据本申请实施例提供的技术方案,多组所述第三压电驱动器与对应的腿部结构的腿部虎克铰连接,所述腿部虎克铰内设置有第四压电驱动器,所述壳腿连杆内设置有第五压电驱动器;所述大腿连杆内设置有第六压电驱动器;所述小腿连杆内设置有磁响应驱动器,所述腿部虎克铰通过第四压电驱动器与壳腿连杆相连,所述壳腿连杆通过第五压电驱动器与大腿连杆相连,所述大腿连杆通过第六压电驱动器与小腿连杆相连。
9、根据本申请实施例提供的技术方案,所述第一主体平台的所述另一端每一侧的腿部结构能够与所述第二主体平台的所述另一端同侧的腿部结构连接。
10、本申请还提供了一种便携式多形态救援机器人,包括至少两个上述的便携式多形态救援机器人单体,一个所述机器人单体的第一主体平台和第二主体平台同侧的腿部结构能够与另一个所述机器人单体的第一主体平台和第二主体平台同侧的腿部结构连接。
11、根据本申请实施例提供的技术方案,一个所述机器人单体的第一主体平台和第二主体平台另一侧的腿部结构能够与另一个所述机器人单体的第一主体平台和第二主体平台另一侧的腿部结构连接。
12、综上所述,本申请提出一种便携式多形态救援机器人单体及机器人,采用两个可枢转连接的主体平台,且每一主体平台的自由端两侧分别铰接腿部结构,该种结构采用腿部结构分别驱动的方式,既能保证机器人灵活地调整步态,又能保证机器人的姿态稳定,地形适应性方面展现出极强的优势。机器人采用两个机器人单体,自由配合实现在复杂环境中多形态工作,从而打破传统机器人单体工作的局限性。且本发明的机器人,整体结构简单高效,容易量产,且方便携带,具有良好的推广价值。
技术特征:
1.一种便携式多形态救援机器人单体,其特征在于,包括:
2.根据权利要求1所述的便携式多形态救援机器人单体,其特征在于,每组腿部结构包括依次连接的腿部虎克铰、壳腿连杆、大腿连杆和小腿连杆。
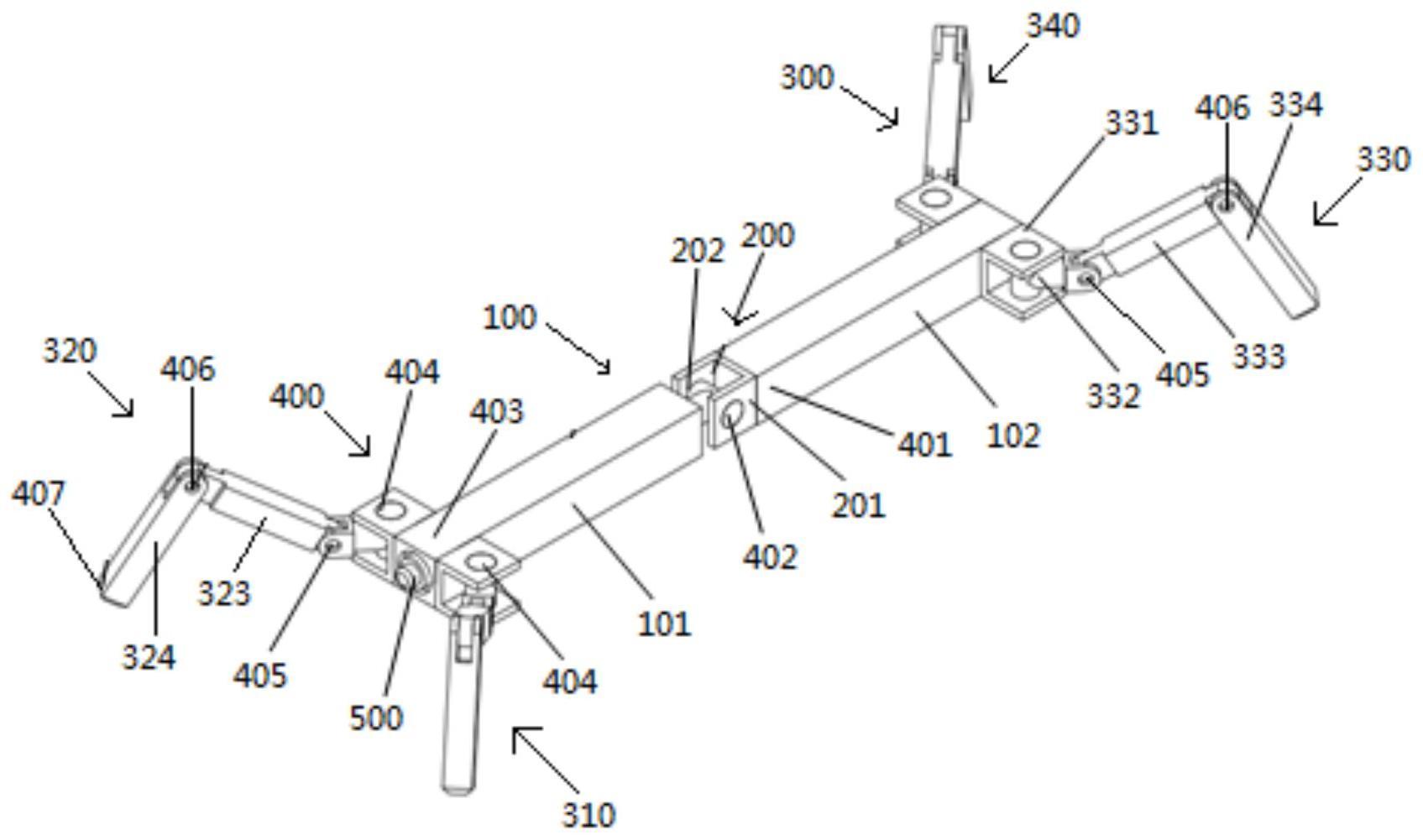
3.根据权利要求2所述的便携式多形态救援机器人单体,其特征在于,所述主体连接结构(200)包括主体虎克铰(201)、主体连接杆(202)和第二压电驱动器(402),所述第一主体平台(101)的所述一端与所述主体连接杆(202)连接,所述第二主体平台(102)的所述一端与所述主体虎克铰(201)连接,所述主体虎克铰(201)和所述主体连接杆(202)通过所述第二压电驱动器(402)连接。
4.根据权利要求3所述的便携式多形态救援机器人单体,其特征在于,所述第一主体平台(101)的所述一端通过转动副与主体连接杆(202)连接,所述第二主体平台(102)的所述一端通过第一压电驱动器(401)与主体虎克铰(201)连接。
5.根据权利要求4所述的便携式多形态救援机器人单体,其特征在于,所述第一主体平台(101)包括壳体、一组摄像组件(500)和两组第三压电驱动器(403),第一主体平台(101)的壳体外部的一端固定安装摄像组件(500)、另一端通过转动副与主体连接杆(202)相连,第一主体平台(101)的壳体内部的两侧分别通过一组所述第三压电驱动器(403)与对应的腿部结构(300)相连。
6.根据权利要求5所述的便携式多形态救援机器人单体,其特征在于,所述第二主体平台(102)包括壳体、一组摄像组件(500)、一组所述第一压电驱动器(401)和两组第三压电驱动器(403),第二主体平台(102)的壳体外部的一端固定安装摄像组件(500)、另一端通过第一压电驱动器(401)与主体虎克铰(201)相连,第二主体平台(102)的壳体内部的两侧分别通过一组所述第三压电驱动器(403)与对应的腿部结构(300)相连。
7.根据权利要求6所述的便携式多形态救援机器人单体,其特征在于,多组所述第三压电驱动器(403)与对应的腿部结构的腿部虎克铰连接,所述腿部虎克铰内设置有第四压电驱动器(404),所述壳腿连杆内设置有第五压电驱动器(405);所述大腿连杆内设置有第六压电驱动器(406);所述小腿连杆内设置有磁响应驱动器(407),所述腿部虎克铰通过第四压电驱动器(404)与壳腿连杆相连,所述壳腿连杆通过第五压电驱动器(405)与大腿连杆相连,所述大腿连杆通过第六压电驱动器(406)与小腿连杆相连。
8.根据权利要求1-7任一项所述的便携式多形态救援机器人单体,其特征在于,所述第一主体平台(101)的所述另一端每一侧的腿部结构能够与所述第二主体平台(102)的所述另一端同侧的腿部结构连接。
9.一种便携式多形态救援机器人,其特征在于,包括至少两个如权利要求1-8任一项的便携式多形态救援机器人单体,一个所述机器人单体的第一主体平台(101)和第二主体平台(102)同侧的腿部结构能够与另一个所述机器人单体的第一主体平台(101)和第二主体平台(102)同侧的腿部结构连接。
10.根据权利要求9所述的便携式多形态救援机器人,其特征在于,一个所述机器人单体的第一主体平台(101)和第二主体平台(102)另一侧的腿部结构能够与另一个所述机器人单体的第一主体平台(101)和第二主体平台(102)另一侧的腿部结构连接。
技术总结
本发明提供了一种便携式多形态救援机器人单体及机器人,便携式多形态救援机器人单体包括:主体平台组、主体连接结构和四组腿部结构,主体平台组包括第一主体平台和第二主体平台,第一主体平台的一端与第二主体平台的一端通过主体连接结构枢转连接,第一主体平台的另一端的两侧分别铰接一组腿部结构,第二主体平台的另一端的两侧分别铰接一组腿部结构;机器人包括两个上述便携式多形态救援机器人单体。该种结构的机器人单体采用腿部结构分别驱动的方式,既能保证机器人单体灵活地调整步态,又能保证机器人单体的姿态稳定,地形适应性方面展现出极强的优势。
技术研发人员:张春燕,刘玉航,夏宇昂,陶可馨,江毅文
受保护的技术使用者:上海工程技术大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!