一种力矩传感器的制作方法
本发明涉及运动参数采集的,具体涉及一种力矩传感器对数据的采集。
背景技术:
1、为了解决传统自行车骑行容易疲劳,电动自行车没电时骑行体验差的问题,电助力自行车应用而生。电动助力自行车是在自行车的基础上添加动力辅助系统而来;与电动自行车最大的区别是,助力自行车没有控制阀门(普通的加速把手),而是通过中轴传感器和电机控制器协作自动完成助力加速过程,也就是助力自行车通过传感器搜集行驶参数(主要是骑车人踩踏的力矩),从而判断骑车人是否需要电机助动以及需要多大助力。由于中轴传感器依附于可以旋转的机构,因此无法通过导线来供电和传输信号,必须以无线的方式实现供电和反向信号传输。
2、目前,常见的技术方案是,信号处理与信号检测之间通过光电耦合或v-f变换的方式进行通讯,通讯成本高且采集精度低。
3、综上,现需要设计一种力矩传感器来解决现有技术中上述问题。
技术实现思路
1、本发明提供了一种力矩传感器,解决了现有技术中骑行参数采集精度低的技术问题。
2、为达到上述目的,本发明采用如下技术方案:
3、一种力矩传感器,包括:
4、中轴,其两端通过支撑轴承与车架可拆卸连接;
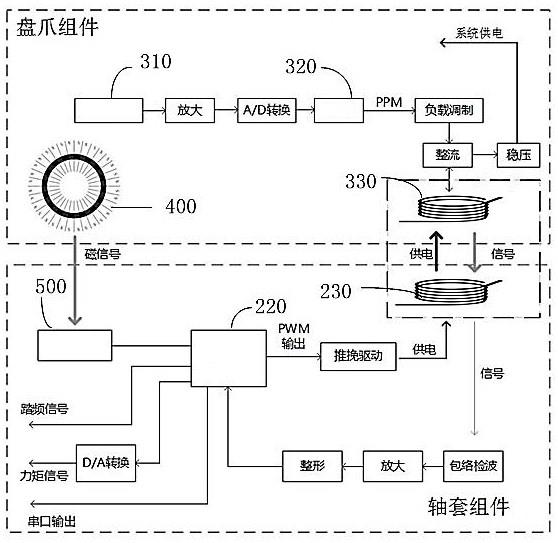
5、轴套组件,其固定于所述中轴外周;所述轴套组件包括轴套本体、第一控制板和第一线圈,所述第一控制板和所述第一线圈均安装于所述轴套本体上;
6、盘爪组件,其套设于所述中轴外围并与所述中轴传动连接,所述盘爪组件包括应变片、第二控制板和第二线圈;
7、其中,所述第二控制板被配置为将所述应变片输出的电压信号进行数字编码后生成脉冲位置调制信号;
8、所述脉冲位置调制信号中的每种码元的高电平的占空比小于低电平的占空比;
9、所述第一控制板被配置为接收所述脉冲位置调制信号并解码后输出扭矩信息。
10、在本发明的一些实施例中,
11、所述第一控制板被配置为输出脉冲宽度调制信号经推挽放大后向所述盘爪组件供电;所述脉冲宽度调制信号的频率与所述脉冲位置调制信号的频率一一对应;
12、所述第二控制板被配置为利用所述脉冲位置调制信号控制对可变负载进行调制。
13、在本发明的一些实施例中,
14、所述第一控制板还设有检波电路,所述检波电路包括电流采样器、包络检波器及信号处理电路;所述电流采样器将负载电流的变化转换为电压的变化,经过所述包络检波器后,得到包络信号;所述信号处理电路将所述包络信号放大、整形后还原所述脉冲位置调制信号。
15、在本发明的一些实施例中,
16、所述第二控制板还被配置为储存所述盘爪组件标定数据;当所述力矩传感器首次上电时,所述第二控制板用于将所述标定数据发送至所述第一控制板;所述标定数据包括所述盘爪组件的型号、系列号、扭矩与所述电压信号的线性关系中的零点和斜率。
17、在本发明的一些实施例中,
18、所述中轴的外围还套接有多级磁铁,所述第一控制板上设有与其电连接的霍尔感应器,所述霍尔感应器与所述多级磁铁径向对应并同轴设置;当所述中轴转动时,所述霍尔感应器与所述多级磁铁的相对位置发生变化并输出两路具有相位差的脉冲信号,所述第一控制板根据所述脉冲信号输出转速信息。
19、在本发明的一些实施例中,
20、所述多级磁铁包括第一磁铁和第二磁铁,所述第一磁铁和所述第二磁铁为半圆形磁铁,两者组成多级磁环。
21、在本发明的一些实施例中,
22、所述第一线圈与所述第二线圈同轴心设置以构成变压器耦合,所述中轴上设有导线槽,所述第二线圈经所述导线槽与所述第二控制板连接。
23、在本发明的一些实施例中,
24、所述盘爪组件还包括盘爪本体,其与所述中轴垂直装配,所述盘爪主体对称设有安装槽,所述应变片的数量为两个,分别固定在对称设置的所述安装槽内;所述应变片与所述第二控制板通信连接。
25、在本发明的一些实施例中,
26、两个所述应变片组成电桥,在扭矩作用下,所述电桥输出电压信号;所述电压信号经放大电路和ad转换电路后传输到所述第二控制板。
27、在本发明的一些实施例中,
28、所述盘爪组件上还包括分别位于所述盘爪本体两侧的盘爪上壳和盘爪下壳;所述盘爪上壳与所述盘爪下壳固定连接以形成用于固定所述第二控制板的安装腔。
29、本发明的技术方案相对现有技术具有如下技术效果:
30、本发明提出一种力矩传感器,该传感器包括盘爪组件和轴套组件,具有扭矩和转速的测量功能;通过使用变压器耦合谐振的方式实现无线供电,同时通过对供电回路施加脉冲位置调制信号的方式实现了力矩信号的数字传输;从而提供了一种低成本、高精度的力矩传感器。同时,该发明提出了力矩传感器的校准及通讯流程,使得盘爪组件与轴套组件之间可以任意互配,提高了可制造性和可维修性。
技术特征:
1.一种力矩传感器,其特征在于,包括:
2.根据权利要求1所述的一种力矩传感器,其特征在于,
3.根据权利要求1所述的一种力矩传感器,其特征在于,
4.根据权利要求1所述的一种力矩传感器,其特征在于,
5.根据权利要求1所述的一种力矩传感器,其特征在于,
6.根据权利要求5所述的一种力矩传感器,其特征在于,
7.根据权利要求6所述的一种力矩传感器,其特征在于,
8.根据权利要求5所述的一种力矩传感器,其特征在于,
9.根据权利要求8所述的一种力矩传感器,其特征在于,
10.根据权利要求8所述的一种力矩传感器,其特征在于,
技术总结
本发明公开了一种力矩传感器,包括:中轴;轴套组件,其固定于所述中轴外周;所述轴套组件包括轴套本体、第一控制板和第一线圈,所述第一控制板和所述第一线圈均安装于所述轴套本体上;盘爪组件,其套设于所述中轴外围并与所述中轴传动连接,所述盘爪组件包括应变片、第二控制板和第二线圈;其中,所述第二控制板被配置为将所述应变片输出的电压信号进行数字编码后生成脉冲位置调制信号;所述脉冲位置调制信号中的每种码元的占空比不大于1/3;所述第一控制板被配置为接收所述脉冲位置调制信号并解码后输出扭矩信息。本发明的力矩传感器成本低、精度高。另外盘爪组件与轴套组件之间可以任意互配,提高了可制造性和可维修性。
技术研发人员:孔繁斌,刘云龙,孙学斌,张召徳
受保护的技术使用者:青岛迈金智能科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!