一种多足仿生机器人的变胞躯体
本发明属于仿生机器人,涉及一种多足仿生机器人的变胞躯体。
背景技术:
1、多足仿生机器人能够模仿动物动作,代替人类在复杂非结构化环境中完成许多高危作业工作,在军事、矿山开采、星球探测、消防营救等领域有着广阔的应用前景。
2、传统多足仿生机器人在模仿动物时,往往关注动物的腿部结构,忽略了躯体对其运动功能性带来的巨大作用,其普遍采用固定的刚性躯体,主要缺点如下;
3、1、刚性躯体不可动,对多足仿生机器人的运动和姿势不起任何作用,同时无法起到缓冲减震的作用。
4、2、刚性躯体的形状无法改变,各条腿的相对位置保持不变,因而多足仿生机器人的整体工作空间小、灵活度差。
5、3、限制了多足仿生机器人对自身重心的调节,使得多足仿生机器人行走过程极不稳定、且稳定性控制难度大。
6、4、刚性躯体的仿生机器人无法实现类似于动物的弯腰、躯体翻转等动作。
技术实现思路
1、针对上述现有技术所存在的技术问题,本发明一种多足仿生机器人的变胞躯体,使多足仿生机器人除了能够对多足动物仿生外,其变胞躯体具有柔性特点,能够对多足仿生机器人的运动和姿势起到调节作用并起到缓冲减震作用;能够改变各条腿的相对位置,因而多足仿生机器人的整体工作空间较大和灵活度较好;能够调节多足仿生机器人的自身重心,使得行走过程更平稳、控制难度小;还能够改变躯体的形状、实现类似于动物的弯腰、躯体翻转变宽窄、躯体翻转变宽、躯体缩小等动作。
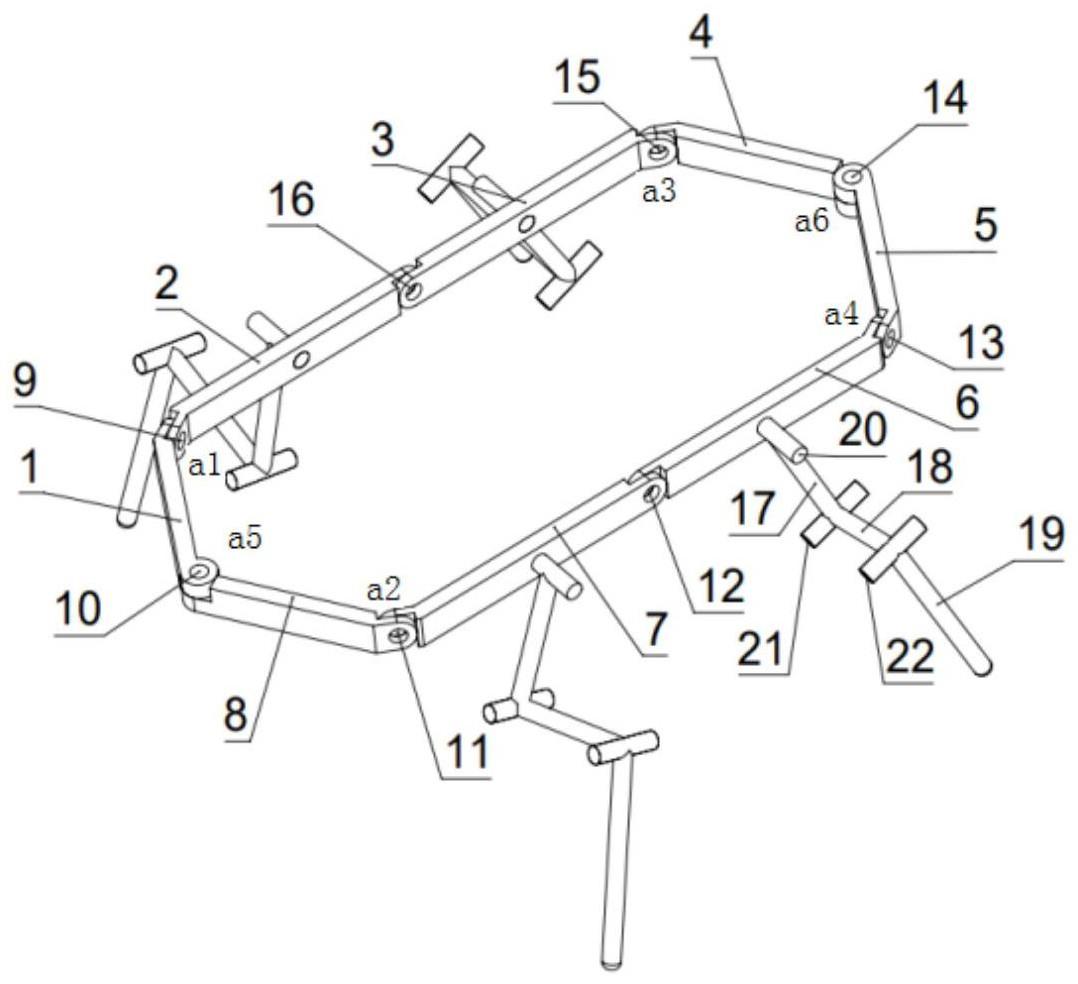
2、为解决上述技术问题,本发明的多足仿生机器人的变胞躯体,包括第一杆、第二杆、第三杆、第四杆、第五杆、第六杆、第七杆和第八杆,以及第一转动铰链、第二转动铰链、第三转动铰链、第四转动铰链、第五转动铰链、第六转动铰链、第七转动铰链和第八转动铰链,
3、其特征在于:所述第二杆和第七杆长度相同,所述第三杆和第六杆长度相同;
4、所述第一杆和第八杆的长度相同,所述第四杆和第五杆的长度相同;
5、所述变胞躯体由第一杆、第二杆、第三杆、第四杆、第五杆、第六杆、第七杆和第八杆相互之间的对接端依次分别通过第一转动铰链、第八转动铰链、第七转动铰链、第六转动铰链、第五转动铰链、第四转动铰链、第三转动铰链和第二转动铰链可转动地、闭链连接而成;
6、所述变胞躯体初始状态时,在同一平面内,
7、所述第一杆、第二杆、第三杆和第四杆分别与第八杆、第七杆、第六杆和第五杆相对于第二转动铰链和第六转动铰链的水平连线一一对应地对称布置,
8、所述第一杆和第二杆之间的夹角ⅰ与第八杆和第七杆之间的夹角ⅱ相等,所述第四杆和第三杆之间的夹角ⅲ与第五杆和第六杆之间的夹角ⅳ相等,
9、所述第一转动铰链、第八转动铰链和第七转动铰链与第三转动铰链、第四转动铰链和第五转动铰链相对于第二转动铰链和第六转动铰链的水平连线对称布置,
10、且所述第一转动铰链与第三转动铰链的轴心线相向相交,所述第四转动铰链与第八转动铰链同轴线,所述第五转动铰链与第七转动铰链的轴心线相向相交,所述第二转动铰链与第六转动铰链相互纵向平行且均与第一转动铰链、第三转动铰链、第四转动铰链、第五转动铰链、第七转动铰链和第八转动铰链垂直。
11、优选地,所述第一杆、第八杆、第四杆和第五杆的长度均相同。优选地,所述第一杆、第二杆、第三杆、第四杆、第五杆、第六杆、第七杆和第八杆的纵向截面均为矩形。
12、优选地,所述第一杆和第二杆之间的夹角ⅰ范围为90至150度。
13、优选地,所述第八杆和第七杆之间的夹角ⅱ范围为90至150度。
14、优选地,所述第四杆和第三杆之间的夹角ⅲ范围为90至150度。
15、优选地,第五杆和第六杆之间的夹角ⅳ为90至150度。
16、优选地,所述第一杆和第八杆之间的夹角ⅴ与第四杆和第五杆之间的夹角ⅵ相等。
17、优选地,所述第一杆和第八杆之间的夹角ⅴ范围为90至150度。
18、优选地,所述第四杆与第五杆之间的夹角ⅵ范围为90至150度。
19、与现有技术相比,本发明包含如下有益效果;
20、1.本发明的多足仿生机器人的变胞躯体,具有柔性特点,对多足仿生机器人运动和姿势能够起到调节作用并能够起到缓冲减震作用。
21、2.本发明中,变胞躯体能够改变各条腿的相对位置,因而多足仿生机器人整体工作空间较大、灵活度较好。
22、3.本发明中,变胞躯体能够调节多足仿生机器人的自身重心,使得行走过程更平稳、控制难度小。
23、4.本发明中,能够通过改变变胞躯体的形状、使多足仿生机器人实现类似于动物的弯腰、躯体翻转变窄、躯体翻转变宽、躯体缩小等动作。
技术特征:
1.一种多足仿生机器人的变胞躯体,包括第一杆、第二杆、第三杆、第四杆、第五杆、第六杆、第七杆和第八杆,以及第一转动铰链、第二转动铰链、第三转动铰链、第四转动铰链、第五转动铰链、第六转动铰链、第七转动铰链和第八转动铰链,
2.如权利要求1所述的多足仿生机器人的变胞躯体,其特征在于:所述第一杆、第八杆、第四杆和第五杆的长度均相同。
3.如权利要求1或2所述的多足仿生机器人的变胞躯体,其特征在于:所述第一杆、第二杆、第三杆、第四杆、第五杆、第六杆、第七杆和第八杆的纵向截面均为矩形。
4.如权利要求3所述的多足仿生机器人的变胞躯体,其特征在于:所述第一杆和第二杆之间的夹角ⅰ范围为90至150度。
5.如权利要求4所述的多足仿生机器人的变胞躯体,其特征在于:所述第八杆和第七杆之间的夹角ⅱ范围为90至150度。
6.如权利要求5所述的多足仿生机器人的变胞躯体,其特征在于:所述第四杆和第三杆之间的夹角ⅲ范围为90至150度。
7.如权利要求6所述的多足仿生机器人的变胞躯体,其特征在于:第五杆和第六杆之间的夹角ⅳ为90至150度。
8.如权利要求7所述的多足仿生机器人的变胞躯体,其特征在于:所述第一杆和第八杆之间的夹角ⅴ与第四杆和第五杆之间的夹角ⅵ相等。
9.如权利要求所述8的多足仿生机器人的变胞躯体,其特征在于:所述第一杆和第八杆之间的夹角ⅴ范围为90至150度。
10.如权利要求9所述的多足仿生机器人的变胞躯体,其特征在于:所述第四杆与第五杆之间的夹角ⅵ范围为90至150度。
技术总结
本发明公开一种具有柔性特点的多足仿生机器人的变胞躯体,第二、七,第三、六,第一、八,第四、五的长度相同;变胞躯体由第一至八杆相互之间的对接端依次分别通过第一和八至二转动铰链可转动地、闭链连接而成;变胞躯体初始状态时,在同一平面内,第一至四杆分别与第八至五杆相对于第二、六转动铰链的水平连线一一对应地对称布置,第一、二杆与第八、七杆之间,第四、三杆与第五、六杆之间的夹角相等,第一、八、七与第三至五转动铰链相对于第二、六转动铰链的水平连线对称布置,且第一、三转动铰链的轴心线相向相交,第四、八转动铰链同轴线,第五、七转动铰链的轴心线相向相交,第二、六转动铰链相互纵向平行且均与其它转动铰链垂直。
技术研发人员:毛江,徐远祥
受保护的技术使用者:重庆城市科技学院
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!