一种可变形折叠式六足机器人的制作方法
本发明涉及一种机器人,特别涉及一种可变形折叠式六足机器人,属于机器人。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器。机器人能够通过编程和自动控制来执行诸如作业或移动等任务。机器人具有感知、决策、执行等基本特征,可以辅助甚至替代人类完成危险、繁重、复杂的工作,提高工作效率与质量,服务人类生活,扩大或延伸人的活动及能力范围。关于机器人的分类,国际上没有制定统一的标准,从不同的角度可以有不同的分类,从应用环境出发将机器人分为两类:制造环境下的工业机器人和非制造环境下的服务与仿人型机器人。
2、现有的仿生机器人移动方式主要包括轮式移动、履带式移动、跳跃式移动和腿式移动等,其中轮式移动机器人行进速度快,转向灵活,故障容易处理,但在路面崎岖的情况下不便于行进,而腿式移动机器人能够轻松地通过松软路面和大跨度障碍,几乎可以适应任何路面的行走,具有良好的机动性能,因此更加适合复杂的路况,但腿式机器人相比于轮式机器人而言,在平坦的路面上行进速度较慢,由此可见,不同的移动方式有着各自不同的优点和缺点,为了能够提高机器人的性能,扩大机器人的应用范围,需要研究一种同时具备轮式和腿式机器人优点的仿生机器人,为此,提出一种可变形折叠式六足机器人。
技术实现思路
1、有鉴于此,本发明希望提供一种可变形折叠式六足机器人,以解决或缓解现有技术中存在的技术问题,至少提供一种有益的选择。
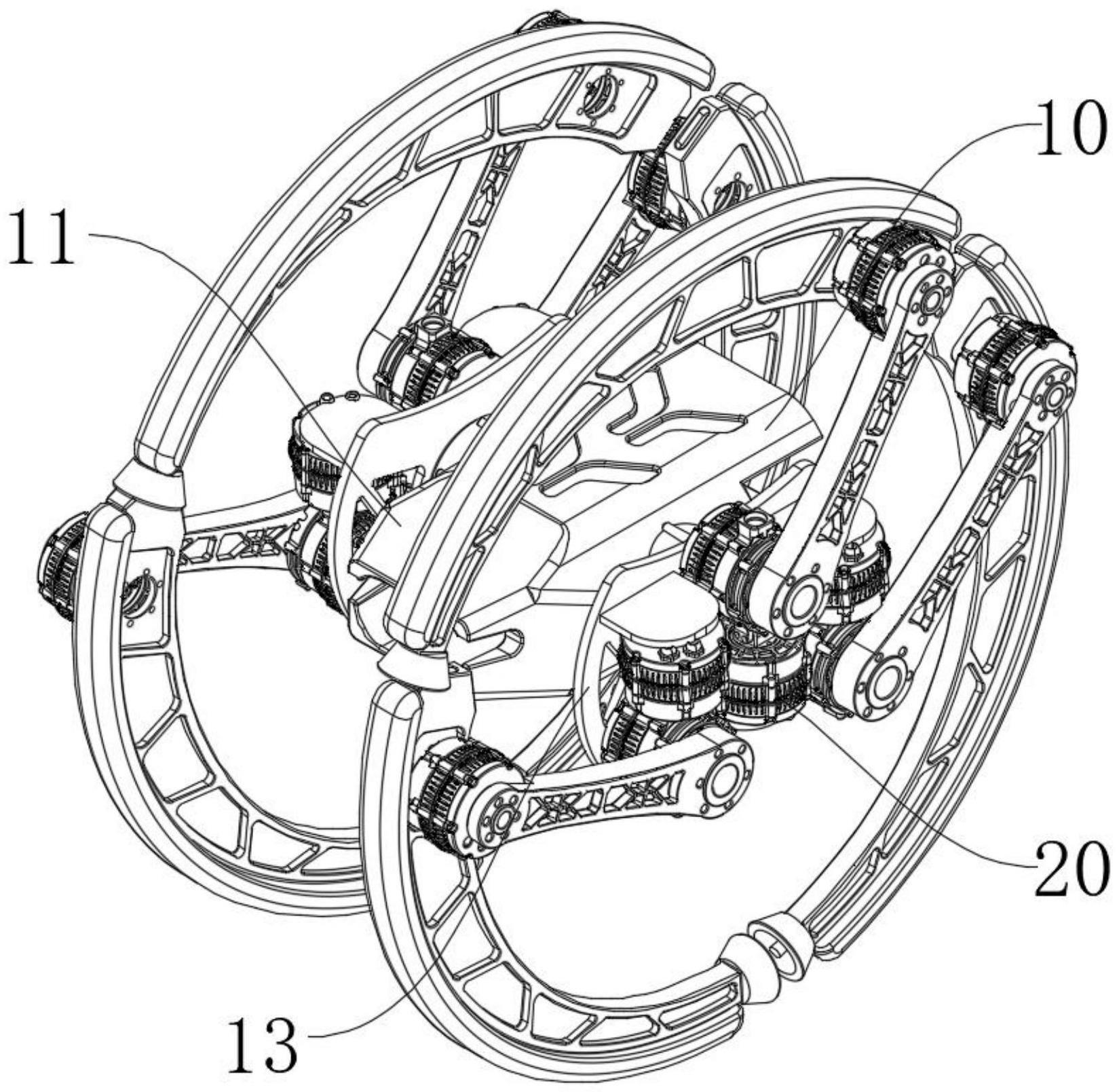
2、本发明实施例的技术方案是这样实现的:一种可变形折叠式六足机器人,包括第一行进组件和第二行进组件,所述第一行进组件包括壳体、第一电机、连接板、第一支撑板和第二支撑板;
3、所述壳体为内部中空结构,两个所述第一电机对称安装于所述壳体的两侧,所述第一电机的输出轴与所述连接板的一侧固定连接,两个所述第一支撑板对称固定连接于所述连接板的一侧,所述第二支撑板固定连接于所述连接板的一侧,壳体用于安装机器人控制元件、机器人运动辅助元件、机器人通信元件等配件,同时可以根据机器人具体使用领域增设外部负载,通过第一电机带动连接板转动,使第二行进腿、第四行进腿和第六行进腿转动,从而实现仿生机器人轮式移动行进;
4、所述第二行进组件安装于所述第一行进组件的两侧。
5、进一步优选的:所述第二行进组件包括第二电机、第三电机、第一行进腿、第四电机、第二行进腿、第五电机、第六电机、第三行进腿、第七电机、第四行进腿、第八电机、第九电机、第五行进腿、第十电机、第六行进腿、垫脚和防滑条;
6、所述第二电机通过支座安装于所述第一支撑板的下表面。
7、进一步优选的:所述第二电机的输出轴与所述第三电机的支座固定连接,所述第三电机的输出轴与所述第一行进腿的一端固定连接。
8、进一步优选的:所述第四电机安装于所述第一行进腿远离所述第三电机的一端,所述第四电机的输出轴与所述第二行进腿的一端固定连接。
9、进一步优选的:所述第五电机通过支座安装于所述第二支撑板的上表面,所述第五电机的输出轴与所述第六电机的支座固定连接,所述第六电机的输出轴与所述第三行进腿的一端固定连接。
10、进一步优选的:所述第七电机安装于所述第三行进腿远离第六电机的一端,所述第七电机的输出轴与所述第四行进腿的一端固定连接。
11、进一步优选的:所述第八电机通过支座安装于所述第一支撑板的下表面,所述第八电机的输出轴与所述第九电机的支座固定连接,所述第九电机的输出轴与所述第五行进腿的一端固定连接。
12、进一步优选的:所述第十电机安装于所述第五行进腿远离第九电机的一端,所述第十电机的输出轴与所述第六行进腿的一端固定连接。
13、进一步优选的:所述第一行进腿、第三行进腿和第五行进腿均匀排列于所述连接板的一侧,所述垫脚固定连接于所述第二行进腿、第四行进腿和第六行进腿的一端。
14、进一步优选的:所述防滑条固定连接于所述第二行进腿、第四行进腿和第六行进腿的一侧。
15、本发明实施例由于采用以上技术方案,其具有以下优点:
16、一、本发明通过电机带动第二行进腿、第四行进腿和第六行进腿折叠,组合形成一个圆形,并通过第一电机进行驱动,使连接板带动第二行进腿、第四行进腿和第六行进腿转动,从而使六足机器人由腿式移动转变为轮式移动,在平坦的路面上获得更快的行进速度,提高行进效率。
17、二、本发明通过电机带动第二行进腿、第四行进腿和第六行进腿展开,并利用第二行进腿、第四行进腿和第六行进腿进行腿式移动,能够更好的适应崎岖的路面,获得良好的机动性能,通过腿式移动与轮式移动的相互转变,使得仿生机器人对路面的适应能力提高,扩大了机器人的应用范围。
18、上述概述仅仅是为了说明书的目的,并不意图以任何方式进行限制。除上述描述的示意性的方面、实施方式和特征之外,通过参考附图和以下的详细描述,本发明进一步的方面、实施方式和特征将会是容易明白的。
技术特征:
1.一种可变形折叠式六足机器人,包括第一行进组件(10)和第二行进组件(20),其特征在于:所述第一行进组件(10)包括壳体(11)、第一电机(12)、连接板(13)、第一支撑板(14)和第二支撑板(15);
2.根据权利要求1所述的一种可变形折叠式六足机器人,其特征在于:所述第二行进组件(20)包括第二电机(21)、第三电机(22)、第一行进腿(23)、第四电机(24)、第二行进腿(25)、第五电机(26)、第六电机(27)、第三行进腿(28)、第七电机(29)、第四行进腿(210)、第八电机(211)、第九电机(212)、第五行进腿(213)、第十电机(214)、第六行进腿(215)、垫脚(216)和防滑条(217);
3.根据权利要求2所述的一种可变形折叠式六足机器人,其特征在于:所述第二电机(21)的输出轴与所述第三电机(22)的支座固定连接,所述第三电机(22)的输出轴与所述第一行进腿(23)的一端固定连接。
4.根据权利要求3所述的一种可变形折叠式六足机器人,其特征在于:所述第四电机(24)安装于所述第一行进腿(23)远离所述第三电机(22)的一端,所述第四电机(24)的输出轴与所述第二行进腿(25)的一端固定连接。
5.根据权利要求2所述的一种可变形折叠式六足机器人,其特征在于:所述第五电机(26)通过支座安装于所述第二支撑板(15)的上表面,所述第五电机(26)的输出轴与所述第六电机(27)的支座固定连接,所述第六电机(27)的输出轴与所述第三行进腿(28)的一端固定连接。
6.根据权利要求5所述的一种可变形折叠式六足机器人,其特征在于:所述第七电机(29)安装于所述第三行进腿(28)远离第六电机(27)的一端,所述第七电机(29)的输出轴与所述第四行进腿(210)的一端固定连接。
7.根据权利要求2所述的一种可变形折叠式六足机器人,其特征在于:所述第八电机(211)通过支座安装于所述第一支撑板(14)的下表面,所述第八电机(211)的输出轴与所述第九电机(212)的支座固定连接,所述第九电机(212)的输出轴与所述第五行进腿(213)的一端固定连接。
8.根据权利要求7所述的一种可变形折叠式六足机器人,其特征在于:所述第十电机(214)安装于所述第五行进腿(213)远离第九电机(212)的一端,所述第十电机(214)的输出轴与所述第六行进腿(215)的一端固定连接。
9.根据权利要求8所述的一种可变形折叠式六足机器人,其特征在于:所述第一行进腿(23)、第三行进腿(28)和第五行进腿(213)均匀排列于所述连接板(13)的一侧,所述垫脚(216)固定连接于所述第二行进腿(25)、第四行进腿(210)和第六行进腿(215)的一端。
10.根据权利要求9所述的一种可变形折叠式六足机器人,其特征在于:所述防滑条(217)固定连接于所述第二行进腿(25)、第四行进腿(210)和第六行进腿(215)的一侧。
技术总结
本发明提供了一种可变形折叠式六足机器人,包括第一行进组件和第二行进组件,所述第二行进组件安装于所述第一行进组件的两侧。本发明将动第二行进腿、第四行进腿和第六行进腿折叠,组合形成一个圆形,并通过第一电机进行驱动,使连接板带动第二行进腿、第四行进腿和第六行进腿转动,从而使六足机器人由腿式移动转变为轮式移动,在平坦的路面上获得更快的行进速度,提高行进效率,通过将第二行进腿、第四行进腿和第六行进腿展开,并利用第二行进腿、第四行进腿和第六行进腿进行腿式移动,能够更好的适应崎岖的路面,通过腿式移动与轮式移动的相互转变,使得仿生机器人对路面的适应能力提高,扩大了机器人的应用范围。
技术研发人员:邹光华,刘霄,刘顺,华永通,雷海峰,李海华,田小丰,陈起旭
受保护的技术使用者:深圳小象电动科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!