一种双足仿生机械鸡系统
本发明涉及双足机器人设备,具体为一种双足仿生机械鸡系统。
背景技术:
1、仿生机械是模仿生物的形态、结构和控制原理设计制造的功能更集中、效率更高并具有生物特征的机械装置。生物的功能和结构是长期自然选择、进化的结果,具有天然的合理性和对自然环境高度的适应性。双足式仿生机械以其出色对环境地形的适应性、运动灵活性和多样性,已成为国内外学者的研究热点。在双足仿生机器人的研究方面,国内起步较晚。目前市场上的双足机器人多局限于儿童娱乐和陪伴,面向未来技术高端,功能强大的双足机器人产品较少,主要原因是现阶段的双足仿生机器人运动性能较差,其行走平稳性和转向灵活性是这类机器人研究的难点。
2、上述现有技术存在如下技术缺陷:现有双足机器人大都采用多个动力源,甚至每个自由度都需要一个动力,系统复杂,控制困难,故障率较高,一些双足机器人采用连杆机构实现行走运动。需要设计一种具有双足仿生机械鸡系统来解决上述出现的问题。
技术实现思路
1、本发明的目的在于提供一种双足仿生机械鸡系统,以解决上述背景技术中提出现有双足机器人大都采用多个动力源,甚至每个自由度都需要一个动力,系统复杂,控制困难,故障率较高,一些双足机器人采用连杆机构实现行走运动的问题。
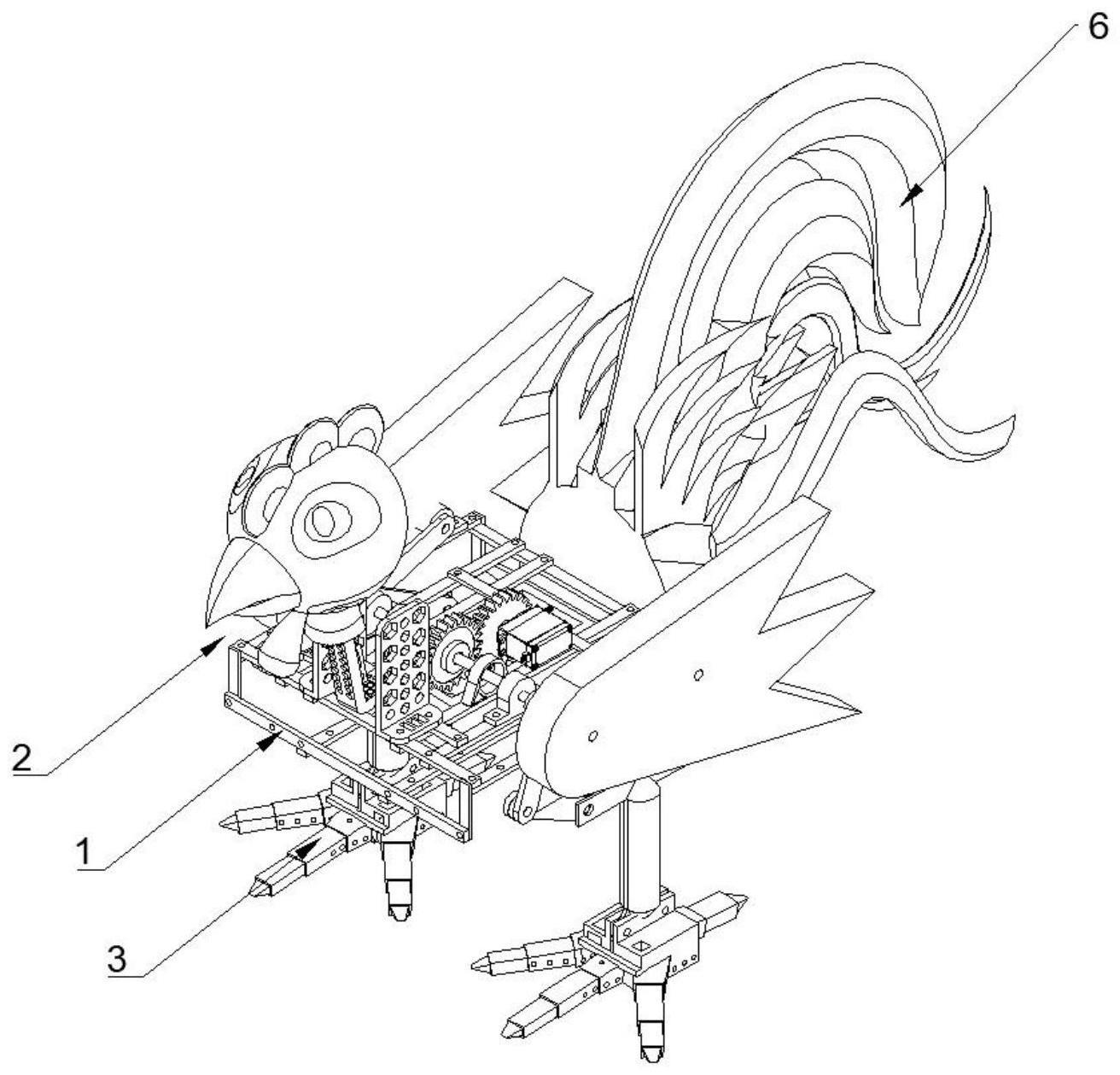
2、为实现上述目的,本发明提供如下技术方案:一种双足仿生机械鸡系统,包括铝合金支架,所述铝合金支架的顶部安装有鸡头摆动部件,所述铝合金支架的顶部且位于鸡头摆动部件的一侧安装有鸡腿运动装置,所述铝合金支架的顶部且位于鸡腿运动装置的一侧安装有可充电直流电源,所述铝合金支架的底部安装有对称分布的两个鸡脚旋转部件,所述鸡脚旋转部件的底部均安装有合金铝片,所述铝合金支架的顶部且位于鸡腿运动装置远离鸡头摆动部件的一侧安装有装饰件。
3、优选的,所述鸡腿运动装置包括主动轴和第二舵机,所述铝合金支架的内部安装有舵机支架,所述舵机支架的顶部固定连接有第二舵机,所述第二舵机的一端连接有小齿轮,所述小齿轮的一侧转动连接有大齿轮,所述小齿轮与大齿轮啮合连接,所述大齿轮通过键槽固定连接有主动轴,所述主动轴的外侧套有对称分布的轴承组,所述轴承组的一侧均安装有两个轴承座,所述主动轴的两端均连接有次动臂,所述主动轴的外侧套有第二皮带轮,其中一个所述轴承座的下方均转动连接有两个等距分布的短形臂,所述短形臂的下方均转动连接有长形臂,另一个所述轴承座的外侧转动连接有中形臂,所述中形臂与对应长形臂转动连接。
4、优选的,所述长形臂的一侧开设有第一左上端孔、左中端孔和右上端孔,所述次动臂的一侧开设有第一左下端孔和右下端孔,所述长形臂一侧的第一左上端孔与次动臂一侧的第一左下端孔同心配合,所述长形臂一侧的右上端孔与次动臂一侧的右下端孔同心配合,所述中形臂的一侧开设有第二左上端孔、第二左下端孔和左后端孔,所述长形臂一侧的左中端孔和中形臂一侧的左后、下端孔三者同心配合,所述短形臂的一侧开设有第一左前上端孔和第二左下端孔,所述轴承座的一侧开设有第二左前上端孔,所述短形臂的一侧的第一左前上端孔与轴承座一侧的第二左前上端孔同心配合,所述合金铝片的一侧开设有圆孔,所述短形臂一侧的第二左下端孔和长形臂一侧的左下端孔分别与合金铝片一侧的圆孔同心配合。
5、优选的,所述鸡头摆动部件包括曲柄和连杆,所述铝合金支架的上方安装有两个对称分布的左固定脚支座,两个所述左固定脚支座之间固定连接有底部圆柱杆,所述底部圆柱杆的外侧安装有头部摆杆,所述头部摆杆的一侧安装有连杆,所述连杆的一侧连接有曲柄,所述第二舵机通过皮带传动连接有第一皮带轮,所述第一皮带轮与曲柄固定连接。
6、优选的,所述左固定脚支座和右固定脚支座均通过螺钉固定连接在铝合金支架顶部。
7、优选的,所述鸡脚旋转部件包括鸡脚支座和第一舵机,所述合金铝片的底部均固定连接有鸡脚支座,所述鸡脚支座的内部均安装有第一舵机,所述第一舵机的内部均开设有卡槽,所述卡槽的内部均安装有第一舵机和转向凸轮。
8、优选的,所述鸡脚旋转部件均分为左右两套部件,所述可充电直流电源固定在铝合金支架上。
9、本发明具有以下优点和有益效果:
10、1、设计了驱动双足仿生机械鸡头部摆动的曲柄摇杆机构和腿部运动的连杆机构,并通过皮带传动将两套机构联动起来,实现双足仿生机械鸡在行走同时头部跟随摆动,更好展示仿生效果,同时减少驱动元件数量,简化系统结构,提高系统可靠性,降低成本;
11、2、设计了双足仿生机械鸡的转向装置,巧妙的利用转向凸轮与地面摩擦力实现了机械鸡360°转向,为解决目前双足机器人转向难题提供了新方法,本装置可适用于不同环境自然灾害的救援行动;可作为不同场景下的运输工具;在陆地上进行侦察,解决了飞行类机器遮蔽物影响大的问题,同时,铝合金结构与简单的控制系统,减少了仿生机械的成本,提高了工作可靠性和耐用度,当机器发生故障时,维修简单,成本低廉。
技术特征:
1.一种双足仿生机械鸡系统,包括铝合金支架(1),其特征在于:所述铝合金支架(1)的顶部安装有鸡头摆动部件(2),所述铝合金支架(1)的顶部且位于鸡头摆动部件(2)的一侧安装有鸡腿运动装置(4),所述铝合金支架(1)的顶部且位于鸡腿运动装置(4)的一侧安装有可充电直流电源(5),所述铝合金支架(1)的底部安装有对称分布的两个鸡脚旋转部件(3),所述鸡脚旋转部件(3)的底部均安装有合金铝片(401),所述铝合金支架(1)的顶部且位于鸡腿运动装置(4)远离鸡头摆动部件(2)的一侧安装有装饰件(6);所述鸡腿运动装置(4)包括主动轴(301)和第二舵机(303),所述铝合金支架(1)的内部安装有舵机支架(305),所述舵机支架(305)的顶部固定连接有第二舵机(303),所述第二舵机(303)的一端连接有小齿轮(304),所述小齿轮(304)的一侧转动连接有大齿轮(302),所述小齿轮(304)与大齿轮(302)啮合连接,所述大齿轮(302)通过键槽固定连接有主动轴(301),所述主动轴(301)的外侧套有对称分布的轴承组(307)。
2.根据权利要求1所述的双足仿生机械鸡系统,其特征在于:所述轴承组(307)的一侧均安装有两个轴承座(309),所述主动轴(301)的两端均连接有次动臂(313),所述主动轴(301)的外侧套有第二皮带轮(306),其中一个所述轴承座(309)的下方均转动连接有两个等距分布的短形臂(315)。
3.根据权利要求2所述的双足仿生机械鸡系统,其特征在于:所述短形臂(315)的下方均转动连接有长形臂(323),另一个所述轴承座(309)的外侧转动连接有中形臂(316),所述中形臂(316)与对应长形臂(323)转动连接。
4.根据权利要求3所述的双足仿生机械鸡系统,其特征在于:所述长形臂(323)的一侧开设有第一左上端孔、左中端孔和右上端孔,所述次动臂(313)的一侧开设有第一左下端孔和右下端孔,所述长形臂(323)一侧的第一左上端孔与次动臂(313)一侧的第一左下端孔同心配合,所述长形臂(323)一侧的右上端孔与次动臂(313)一侧的右下端孔同心配合。
5.根据权利要求3所述的双足仿生机械鸡系统,其特征在于:所述中形臂(316)的一侧开设有第二左上端孔、第二左下端孔和左后端孔,所述长形臂(323)一侧的左中端孔和中形臂(316)一侧的左后、下端孔三者同心配合,所述短形臂(315)的一侧开设有第一左前上端孔和第二左下端孔,所述轴承座(309)的一侧开设有第二左前上端孔。
6.根据权利要求3所述的双足仿生机械鸡系统,其特征在于:所述短形臂(315)的一侧的第一左前上端孔与轴承座(309)一侧的第二左前上端孔同心配合,所述合金铝片(401)的一侧开设有圆孔,所述短形臂(315)一侧的第二左下端孔和长形臂(323)一侧的左下端孔分别与合金铝片(401)一侧的圆孔同心配合。
7.根据权利要求1所述的双足仿生机械鸡系统,其特征在于:所述鸡头摆动部件(2)包括曲柄(201)和连杆(202),所述铝合金支架(1)的上方安装有两个对称分布的左固定脚支座(204),两个所述左固定脚支座(204)之间固定连接有底部圆柱杆(207),所述底部圆柱杆(207)的外侧安装有头部摆杆(203),所述头部摆杆(203)的一侧安装有连杆(202),所述连杆(202)的一侧连接有曲柄(201),所述第二舵机(303)通过皮带传动连接有第一皮带轮(206),所述第一皮带轮(206)与曲柄(201)固定连接。
8.根据权利要求7所述的双足仿生机械鸡系统,其特征在于:所述左固定脚支座(204)和右固定脚支座(205)均通过螺钉固定连接在铝合金支架(1)顶部。
9.根据权利要求1所述的双足仿生机械鸡系统,其特征在于:所述鸡脚旋转部件(3)包括鸡脚支座(402)和第一舵机(403),所述合金铝片(401)的底部均固定连接有鸡脚支座(402),所述鸡脚支座(402)的内部均安装有第一舵机(403),所述第一舵机(403)的内部均开设有卡槽,所述卡槽的内部均安装有第一舵机(403)和转向凸轮(404)。
10.根据权利要求9所述的双足仿生机械鸡系统,其特征在于:所述鸡脚旋转部件(3)均分为左右两套部件,所述可充电直流电源(5)固定在铝合金支架(1)上。
技术总结
本发明公开了一种双足仿生机械鸡系统,涉及双足机器人设备技术领域,包括铝合金支架,所述铝合金支架的顶部安装有鸡头摆动部件,所述铝合金支架的顶部且位于鸡头摆动部件的一侧安装有鸡腿运动装置,本发明有益增效:设计了驱动双足仿生机械鸡头部摆动的曲柄摇杆机构和腿部运动的连杆机构,并通过皮带传动将两套机构联动起来,实现双足仿生机械鸡在行走同时头部跟随摆动,更好展示仿生效果,同时减少驱动元件数量,简化系统结构,提高系统可靠性,降低成本;设计了双足仿生机械鸡的转向装置,铝合金结构与简单的控制系统,减少了仿生机械的成本,提高了工作可靠性和耐用度,当机器发生故障时,维修简单,成本低廉。
技术研发人员:贺莹,朱世飞,邬汶卓,杨玉川,闫振宇,孙江
受保护的技术使用者:天津仁爱学院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!