便捷式自平衡搬运车
本发明属于辅助搬运机械制造,特别涉及便捷式自平衡搬运车。
背景技术:
1、我国人口众多,为减轻人力成本及增大作业效率。需要不断的向机械化方向靠拢。而随着物流、制造等行业的发展,物流搬运需求越来越大,人们对于搬运设备的需求也在不断提高。传统的手推车和电动叉车等设备虽然在短距离内具有很高的搬运效率,但对于大型、复杂路面的物体搬运,这些设备往往无法满足需求,且搬运过程中也存在着危险因素。
2、此外,传统搬运设备还存在一些局限性,如操作不够灵活、机动性差,受限场景多等。手推车需要人力推动,操作不够灵活,而电动叉车虽然可以实现自主行驶和举升,但存在受限于场地、路面等因素的问题,且操作过程中也存在安全隐患。目前,公开号为cn110104586 b的中国专利文献公开了一种搬运车,设置了门架组件,通过在门架组件上设置支撑组件,在门架组件相对于车身翻转时,门架组件可带动支撑组件转动进而抵接在地面上,增加了搬运车与地面的接触面积且提供支撑力。但是,这种搬运车还存在着一些问题:(1)只适用于平坦的路面,无法应对凹凸不平、上下坡路面等不同路况;(2)搬运能力较小,无法满足大型、大重量物体的搬运需求。
技术实现思路
1、针对上述技术问题,本发明提供便捷式自平衡搬运车,能够在凹凸不平、平坦、上下坡路面等多种路况下操作物体,适用范围更广,且能够搬运大型、重量级物体,满足多样化、个性化的搬运需求。
2、为实现上述目的,本发明采取的技术方案为:
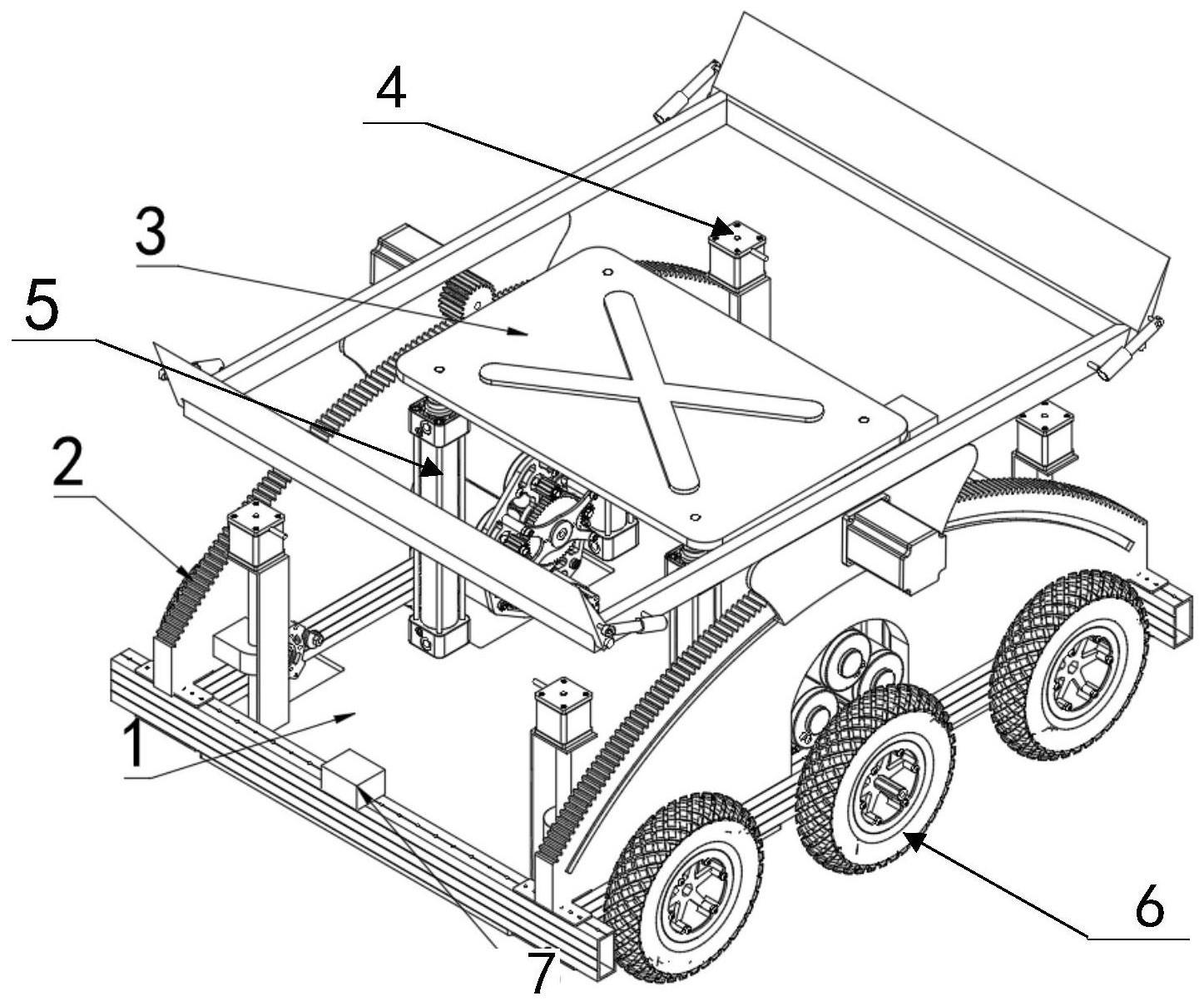
3、便捷式自平衡搬运车,包括轮组机构,还包括底盘、移动机构、承载板和自平衡机构,所述的轮组机构安装于底盘两侧,移动机构安装于底盘之上,自平衡机构支撑承载板并对承载板进行平衡以使承载板处于水平状态。
4、进一步设置,所述承载板的非载物面安装姿态传感器,姿态传感器用于判断承载板是否平衡。
5、进一步设置,所述的自平衡机构包括数个液压杆,液压杆上端连接承载板,液压杆下端安装于底盘。
6、进一步设置,所述的轮组机构包括驱动轮、辅助轮和驱动电机,驱动轮和辅助轮都相对应的安装于底盘两侧,驱动电机安装于底盘上,驱动轮与驱动电机的电机轴连接。
7、进一步设置,所述的移动机构包括弧形齿条、搬起件、连接件和驱动件,弧形齿条与驱动件啮合,驱动件通过连接件驱动搬起件移动。
8、进一步设置,所述的弧形齿条设有滑槽,所述的连接件设有导向块,导向块滑动安装于滑槽。
9、进一步设置,所述的驱动件包括滚齿,滚齿与所述的弧形齿条啮合,通过电机驱动滚齿在弧形齿条的弧面方向上运动。
10、进一步设置,所述的搬起件包括起货架和推拉杆,起货架两端铰接铲片,起货架与推拉杆第一端连接,铲片与推拉杆第二端连接。
11、进一步设置,其特征在于,设有升降组件,升降组件包括机架和滑块,滑块与所述的弧形齿条连接,机架安装于所述的底盘。
12、进一步设置,所述的底盘四周设有柔性垫,承载板上设有防滑件。
13、进一步设置,所述的底盘安装有视觉传感器,用于检测货物与所述便捷式自平衡搬运车的距离。
14、进一步设置,所述的自平衡机构和升降组件为电动推杆装置。
15、进一步设置,所述的底盘为阿克曼底盘或履带式底盘。
16、综上所述,本发明具有以下有益效果:
17、1、本发明相对于传统的手推车和电动叉车,以及现有的搬运车,具有多路况适用以及搬运能力强的优点,本发明的搬运车可以在凹凸不平、平坦、上下坡路面等多种路况下操作物体,适用范围更广;本发明的搬运车可以搬运大型、重量级物体,满足多样化、个性化的搬运需求,改善了当前搬运车的问题,提高了作业效率,减少了人工劳动力。
18、2、本发明通过移动机构完成货物的上下货过程,自平衡机构为货物保证在搬运车上的平衡与稳定,本发明结构设计简单紧凑,结构技术要素确定、匹配科学合理,使用寿命长,可更换应用在不同场景中的底盘结构,为不同环境场景中搬运作业的产业化提供了技术支持。
19、3、本发明在传统搬运车基础上,巧妙地通过铲板与起货架的铰接方式,并借助伸缩杆的推拉作用完成铲板在铰接轴向上的翻转过程,驱动机构可以带动起货架在弧形齿条的齿面方向上运动,弧形齿条的结构保证了起货架铲片在车身方向上的上下货动作。
20、4、本发明通过承载板调整货物水平位置,并可以配合移动机构更加便捷合理的完成装车和卸货过程。
21、5、本发明在搬运货物的过程中,移动机构、承载板、自平衡机构和升降组件均可以独立运动,使搬运车能够在一个搬运周期内同时完成搬运调平与搬运固定两个动作,并且可以有效简便地实现装车和卸货过程。
技术特征:
1.一种便捷式自平衡搬运车,包括轮组机构(6),其特征在于,还包括底盘(1)、移动机构(2)、承载板(3)和自平衡机构(5),所述的轮组机构(6)安装于底盘(1)两侧,移动机构(2)安装于底盘(1)之上,自平衡机构(5)支撑承载板(3)并对承载板(3)进行平衡以使承载板(3)处于水平状态。
2.根据权利要求1所述的便捷式自平衡搬运车,其特征在于,所述承载板(3)的非载物面安装姿态传感器(8),姿态传感器(8)用于判断承载板(3)是否平衡。
3.根据权利要求1所述的便捷式自平衡搬运车,其特征在于,所述的自平衡机构(5)包括数个液压杆(51),液压杆(51)上端连接承载板(3),液压杆(51)下端安装于底盘(1)。
4.根据权利要求3所述的便捷式自平衡搬运车,其特征在于,所述的轮组机构(6)包括驱动轮(61)、辅助轮(62)和驱动电机(63),驱动轮(61)和辅助轮(62)都相对应的安装于底盘(1)两侧,驱动电机(63)安装于底盘(1)上,驱动轮(61)与驱动电机(63)的电机轴连接。
5.根据权利要求1所述的便捷式自平衡搬运车,其特征在于,所述的移动机构(2)包括弧形齿条(21)、搬起件(22)、连接件(23)和驱动件(24),弧形齿条(21)与驱动件(24)啮合,驱动件(24)通过连接件(23)驱动搬起件(22)移动。
6.根据权利要求5所述的便捷式自平衡搬运车,其特征在于,所述的弧形齿条(21)设有滑槽(25),所述的连接件(23)设有导向块(231),导向块(231)滑动安装于滑槽(25)。
7.根据权利要求6所述的便捷式自平衡搬运车,其特征在于,所述的驱动件(24)包括滚齿(241),滚齿(241)与所述的弧形齿条(21)啮合,通过电机(242)驱动滚齿(241)在弧形齿条(21)的弧面方向上运动。
8.根据权利要求5所述的便捷式自平衡搬运车,其特征在于,所述的搬起件(22)包括起货架(222)和推拉杆(223),起货架(222)两端铰接铲片(221),起货架(222)与推拉杆(223)第一端连接,铲片(221)与推拉杆(223)第二端连接。
9.根据权利要求1-8任一项所述的便捷式自平衡搬运车,其特征在于,设有升降组件(4),升降组件(4)包括机架(41)和滑块(42),滑块(42)与所述的弧形齿条(21)连接,机架(41)安装于所述的底盘(1)。
10.根据权利要求9所述的便捷式自平衡搬运车,其特征在于,所述的底盘(1)四周设有柔性垫(11),承载板(3)上设有防滑件(31)。
技术总结
本发明属于辅助搬运机械制造技术领域,公开了一种便捷式升降自平衡搬运车,包括轮组机构,还包括底盘、移动机构、承载板和自平衡机构,所述的轮组机构安装于底盘两侧,移动机构安装于底盘之上,自平衡机构支撑承载板并对承载板进行平衡以使承载板处于水平状态。本发明相对于传统的手推车和电动叉车,以及现有的搬运车,具有多路况适用以及搬运能力强的优点,本发明的搬运车可以在凹凸不平、平坦、上下坡路面等多种路况下操作物体,适用范围更广;本发明的搬运车可以搬运大型、重量级物体,满足多样化、个性化的搬运需求,改善了当前搬运车的问题,提高了作业效率,减少了人工劳动力。
技术研发人员:张俐楠,靳力春,吴冠武,谢鹏,王洪成,叶云翔
受保护的技术使用者:杭州电子科技大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!