一种全向移动机器人及其平衡摇臂结构
本发明涉及移动机器人底盘结构,尤其涉及一种全向移动机器人及其平衡摇臂结构。
背景技术:
1、在全向移动机器人底盘中,无论是室内平整场地,还是室外地形复杂路面,车轮在越障时摩擦力不足导致打滑。尤其对于四轮移动机器人底盘,在越障时会发生1~2轮离地,失去附着导致摩擦力减小,进而导致移动机器人动力不足,发生倾覆等危险。最终导致移动机器人失去控制。
2、在目前的设计方案中,普遍采用底盘柔性设计实现车轮附着,通过挠性底盘的扭转变形,保证运动时四轮的抓地性,但问题也很明显,底盘集成度不高,刚度变差;另外采用弹簧结构设计的柔性悬挂,导致装配过程复杂,无法保证移动机器人的稳定性,还极大占用机器人的设计负载和布置空间。
技术实现思路
1、本发明的目的在于提供一种全向移动机器人及其平衡摇臂结构,为全向移动机器人提供一种结构简单且仿地形的底盘结构方案。
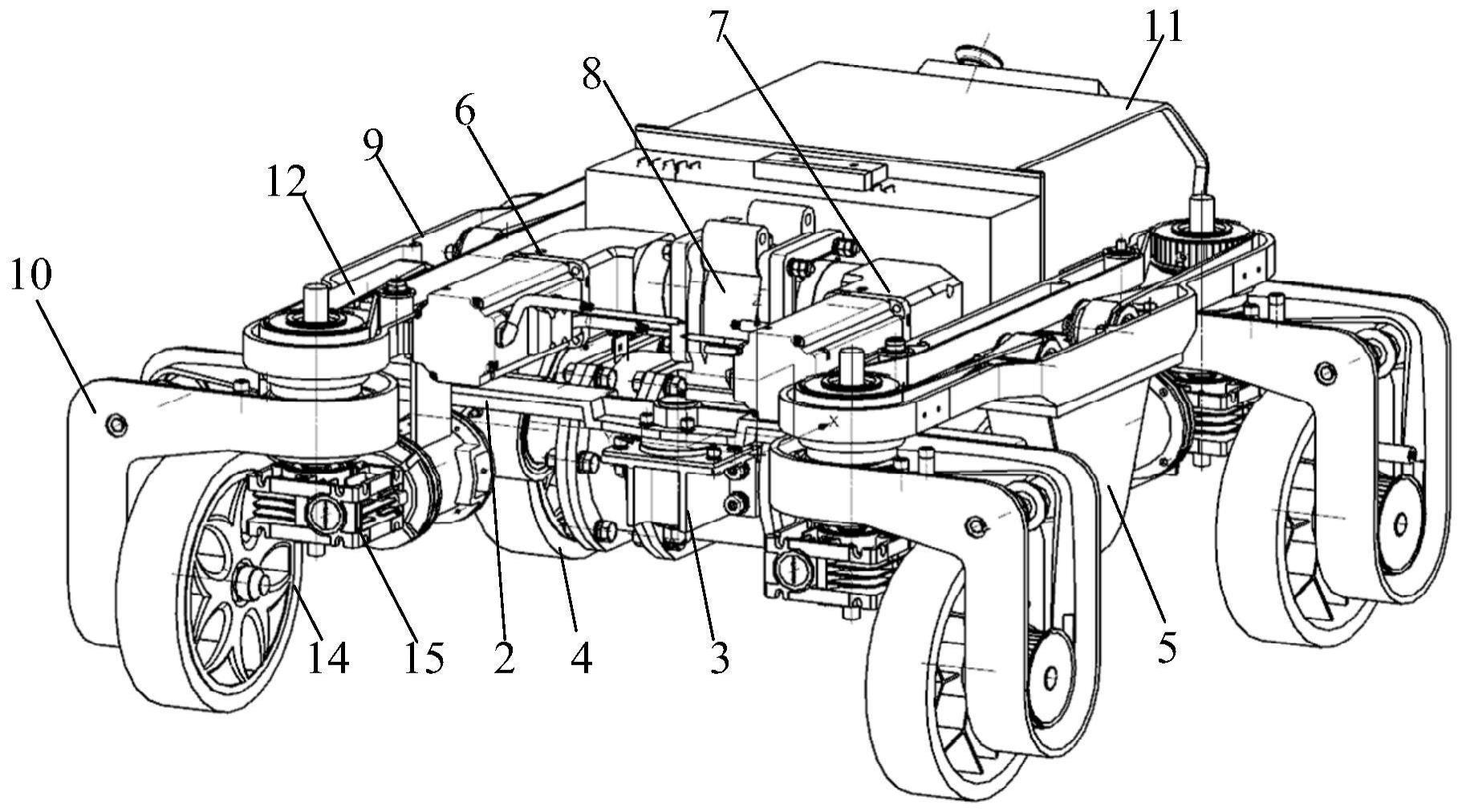
2、为此,本发明提供了一种全向移动机器人,包括包括底盘结构,所述底盘结构由h型动力系统、位于h型动力系统左右两侧的摆臂行走机构、以及平衡摇臂结构组成,其中所述h型动力系统用于将动力分配至两侧的摆臂行走机构,所述摆臂行走机构以h型动力系统的动力输出轴为轴心,能够自由摆动;所述平衡摇臂结构设置在h型动力系统与其两侧的摆臂行走机构之间,用于对所述h型动力系统进行转动约束,以使所述h型动力系统、摆臂行走机构和所述平衡摇臂结构三者构成一个具有底盘功能的整体。
3、本发明还提供了一种全向机器人的平衡摇臂结构,所述全向机器人包括h型动力系统、位于h型动力系统左右两侧的摆臂行走机构,所述平衡摇臂结构包括回转支撑结构、中间摇臂、位于中间摇臂左右两端的侧摇臂,其中,所述回转支撑结构固定在h型动力系统上,所述中间摇臂中部固定在回转支撑结构的支撑轴上,以支撑轴为轴心在xy平面上能够自由偏转,所述侧摇臂与所述中间摇臂之间采用第一球面副连接,所述侧摇臂与所述摆臂行走机构之间采用第二球面副连接。
4、本发明的平衡摇臂机构起到均化两侧摆臂俯仰扰动输入的作用,进而保证底盘的越障仿形性能。本发明的平衡摇臂结构的另一个重要作用是使两侧摆臂的动作相互关联,调整移动机器人重力在各轮上的分配。
5、本发明的具有平衡摇臂结构的底盘结构,与现有技术(cn217672826u、一种差动摇臂移动机器人底盘)相比,其结构简单、方便安装,质量轻、占用空间少,与底盘装配的一体化程度高。
6、除了上面所描述的目的、特征和优点之外,本发明还有其它的目的、特征和优点。下面将参照图,对本发明作进一步详细的说明。
技术特征:
1.一种全向移动机器人,包括底盘结构,其特征在于,所述底盘结构由h型动力系统(4)、位于h型动力系统(4)左右两侧的摆臂行走机构(5)、以及平衡摇臂结构组成,其中
2.根据权利要求1所述的全向移动机器人,其特征在于,
3.根据权利要求2所述的全向移动机器人,其特征在于,所述h型动力系统(4)包括主电机(6)、副电机(7)、第一直角减速器(31)、第二直角减速器(35)、以及双功率流差速系统(8),其中,所述双功率流差速系统(8)用于将主副电机动力分配至两侧的摆臂行走机构(5)。
4.根据权利要求3所述的全向移动机器人,其特征在于,所述摆臂行走机构(5)包括摆臂支撑壳(18)、摆臂(9)、位于摆臂两端的支腿(10),其中,所述支腿(10)上设有车轮(14)和用于支腿转向的转向电机(15),其中,所述摆臂支撑壳(18)和摆臂(9)呈t型连接。
5.根据权利要求4所述的全向移动机器人,其特征在于,所述摆臂行走机构(5)还包括用于变向传送动力的第一同步齿传动组件和用于变向传送动力的第二同步齿形带传动组件,所述摆臂和支腿均为壳体件,第一同步齿形带传动组件和第二同步齿形带传动组件设置在壳体件的内腔中,用于将双功率流差速系统(12)分配的动力再分配至车轮(14)。
6.根据权利要求4所述的全向移动机器人,其特征在于,所述中间摇臂(2)的两端具有自本体向下延伸的安装耳部(2a),其中,所述第一球面副(16)设置在安装耳部(2a)上,所述第二球面副(17)安装在摆臂支撑壳的内侧面且位于h型动力系统(4)动力输出轴的正上方。
7.根据权利要求6所述的全向移动机器人,其特征在于,所述侧摇臂(1)具有与第一球面副(16)连接的第一端和与第二球面副(17)连接的第二端,其中,左右两个侧摇臂(1)的第一端之间的间距大于第二端之间的间距。
8.根据权利要求3所述的全向移动机器人,其特征在于,还包括基于斜行模式的多点预瞄模糊补偿轨迹跟踪控制器,其依靠侧向偏移量来判定预瞄距离,并通过模糊补偿对远端预瞄点权重增大进行补偿。
9.根据权利要求3所述的全向移动机器人,其特征在于,还包括底盘跟随原地转向副电机转角控制器,其在控制底盘跟随原地转向时,通过约束副电机转速来控制移动机器人底盘绕几何中心旋转的角速度。
10.一种全向机器人的平衡摇臂结构,所述全向机器人包括h型动力系统(4)、位于h型动力系统左右两侧的摆臂行走机构(5),其特征在于,
技术总结
本发明公开了一种全向移动机器人及其平衡摇臂结构,该全向移动机器人包括底盘结构,该底盘结构由H型动力系统、两侧的摆臂行走机构和平衡摇臂结构组成,其中所述H型动力系统用于将动力分配至两侧的摆臂行走机构,所述摆臂行走机构以H型动力系统的动力输出轴为轴心,能够自由摆动;所述平衡摇臂结构设置在H型动力系统与其两侧的摆臂行走机构之间,用于对所述H型动力系统进行转动约束,以使所述H型动力系统、摆臂行走机构和所述平衡摇臂结构三者构成一个具有底盘功能的整体,该平衡摇臂结构包括回转支撑结构、中间摇臂、位于中间摇臂左右两端的侧摇臂。本发明的平衡摇臂结构起到均化两侧摆臂俯仰扰动输入的作用,进而保证底盘的越障仿形性能。
技术研发人员:姚圣卓,冉起帆,李岳业,于小湖,张浩阳,王松伟,高峰
受保护的技术使用者:北京建筑大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!