基于复合凸轮结构的微型六足爬行机器人
本发明属于微型机器人,具体是一种基于复合凸轮结构的微型六足爬行机器人。
背景技术:
1、微型机器人具有体积小、运动灵活等特点,可在微空间中进行可控操作或采集信息,能够替代人类在微空间中执行任务,例如管道检测、灾后救援、废墟探测、排爆等。由于体积的限制,微型机器人的结构设计需要具有一定的被动机械自稳定性,才能在复杂地形环境中稳定运动。
2、公开号为cn104802875a的专利申请公开了一种六足仿生爬行机器人,包括六条仿生c形腿,与六条仿生c形腿对应配制的六个电机、六个驱动器以及六个位置传感器,电机经过减速机带动仿生c形腿的腿部进行旋转运动,对于沙漠等松软地面环境的适应能力较好,可用于复杂环境探测。该机器人的每条腿都配置单独的电机驱动,保证了爬行过程中的稳定性,但是元器件较多,结构较复杂,在控制方面需要考虑各条仿生c形腿之间的协调性,增加了控制难度。
3、为此,本发明设计一种基于复合凸轮结构的微型六足爬行机器人,通过两个驱动电机带动六条腿运动,具有结构简单、稳定性高、体积小等优点。
技术实现思路
1、针对现有技术的不足,本发明拟解决的技术问题是,提供一种基于复合凸轮结构的微型六足爬行机器人。
2、为了解决上述技术问题,本发明采用如下的技术方案:
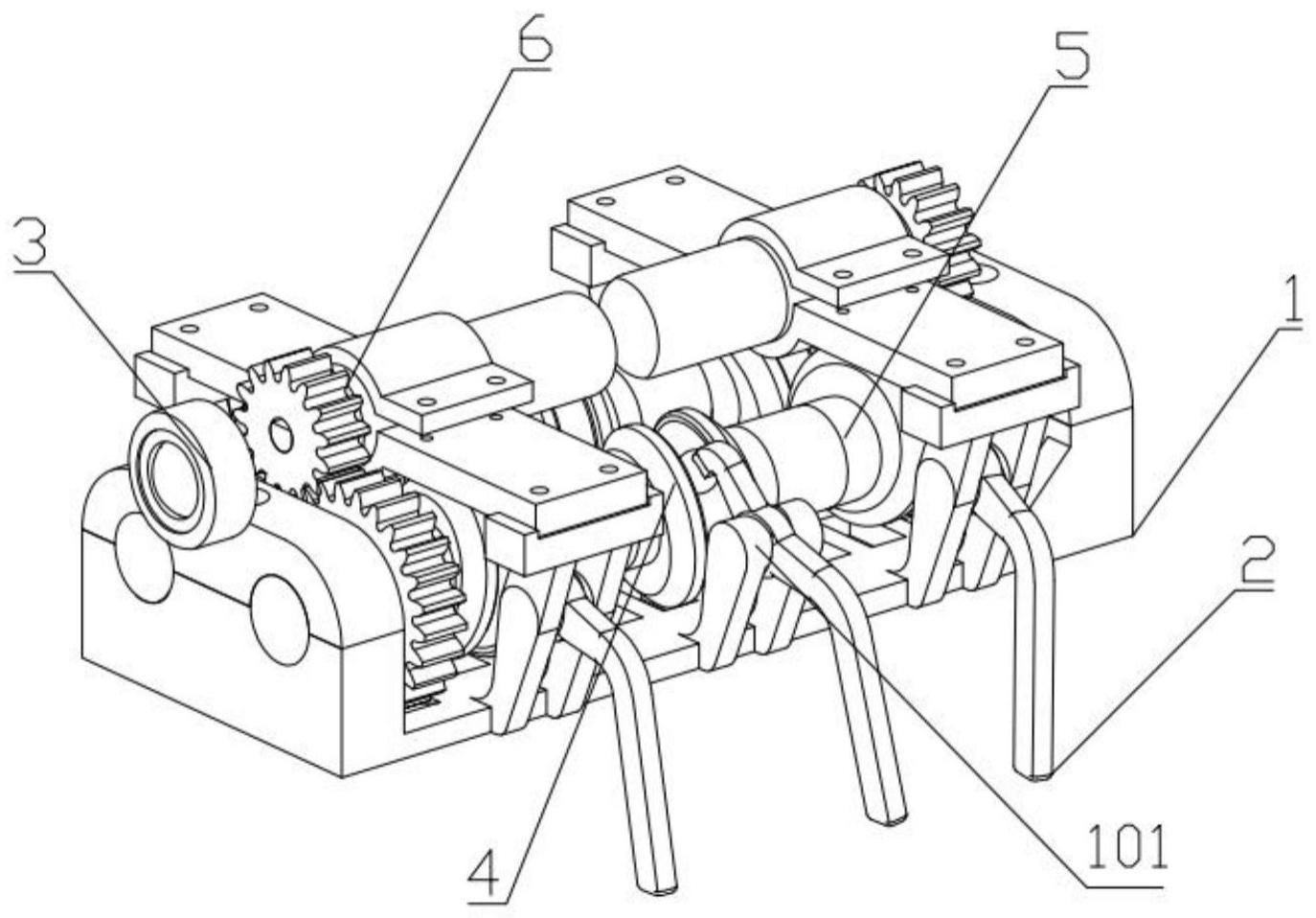
3、一种基于复合凸轮结构的微型六足爬行机器人,其特征在于,包括机器人壳体、支腿、凸轮、凸轮轴和驱动机构;所述机器人壳体内的左、右两侧对称安装两个凸轮轴,每个凸轮轴上安装一组由三个凸轮组成的复合凸轮,凸轮开有环绕在凸轮周向上的异型凸轮槽,位于左前、右中以及左后位置的三个凸轮的安装角度相同,即三个凸轮的异型凸轮槽布置方向相同,位于右前、左中以及右后位置的三个凸轮的安装角度相同,且与另外三个凸轮的异型凸轮槽布置方向相差180°;六条支腿的一端始终与对应凸轮的异型凸轮槽配合,每条支腿的末端伸出机器人壳体外;驱动机构与两个凸轮轴连接,驱动凸轮轴转动,进而驱动六条支腿运动。
4、进一步的,支腿末端的运动轨迹与凸轮转动的关系式为:
5、qn(t)=k2k1g(t)c(s)(11)
6、式中,qn(t)为t时刻支腿末端几何中心的位置,k1和k2为常数矩阵,g(t)为凸轮转动的旋转矩阵,c(s)为异型凸轮槽的中心点在空间中的运动轨迹。
7、进一步的,所述支腿包括球头、支腿连杆和球头支撑关节;从动球位于支腿连杆的一端,且与凸轮的异型凸轮槽配合;球头支撑关节位于支腿连杆上部,球头支撑关节同时与机器人壳体转动连接形成球面副。
8、进一步的,所述支腿连杆呈类m型结构,具有两个上凸型折弯部和位于两个上凸型折弯部的下凹型折弯部,球头支撑关节位于下凹型折弯部的折弯处。
9、进一步的,令点a为球头的几何中心,点b为球头支撑关节的几何中心,点n为支腿末端的几何中心,点m为邻近支腿末端的上凸型折弯部的折弯点,ra为点a到b的距离,rb为点b到m的距离,rc为点m到n的距离,θ1为线段ab与水平方向的夹角,θ2为线段bm与水平方向的夹角,θ3为线段mn与竖直方向的夹角,h为点n到与支腿配合的凸轮圆心的竖直距离,e为点n到两个凸轮轴对称面的距离,l为凸轮圆心到两个凸轮轴对称面的距离,r为凸轮圆心到球头几何中心的距离,为线段bn与水平方向的夹角,则点n到b的距离rg满足式(1),点a、b的位置满足式(2),支腿在水平方向和竖直方向的运动学关系满足式(3)和(4);
10、
11、
12、
13、
14、进一步的,所述驱动机构包括位于机器人壳体前、后端的两个驱动模块,每个驱动模块均包括驱动电机、电机支架、主动齿轮和从动齿轮;驱动电机通过电机支架安装在机器人壳体的上部,主动齿轮安装在驱动电机的输出轴上,从动齿轮安装在相应的凸轮轴上且与主动齿轮啮合。
15、与现有技术相比,本发明的有益效果是:
16、1、本发明的结构新颖,通过凸轮建立驱动机构与各个支腿之间的联系,凸轮的周向上设有异型凸轮槽,支腿与异型凸轮槽配合,在凸轮转动过程中支腿在异型凸轮槽的限制下被动运动,将凸轮自身的旋转运动转换为支腿在空间中的运动,使支腿末端按照期望轨迹运动,实现机器人的爬行。
17、2、本发明的凸轮轴上设有三个凸轮组成的复合凸轮结构,每个凸轮对应一个支腿,驱动机构只需要两个驱动电机实现两个凸轮轴的转动,与常规的六足爬行机器人相比,驱动结构简单,减少了驱动电机的数量,降低了控制复杂度,采用简单的控制策略即可在复杂地形环境下完成直行、转弯、旋转等运动。常规的六足爬行机器人需要六个驱动电机驱动六条腿运动。在结构布置方面,基于仿生学原理,采用三角交替步态,保证机器人在任意时刻至少有三条支腿接触地面,确保机器人在爬行过程中的平衡,提高稳定性。
18、3、本发明的爬行机器人属于厘米级,长宽高都在五厘米以内,体积小,隐蔽性强,可以搭载摄像头、传感器等传感设备,可代替人类在狭小空间中执行任务。
技术特征:
1.一种基于复合凸轮结构的微型六足爬行机器人,其特征在于,包括机器人壳体、支腿、凸轮、凸轮轴和驱动机构;所述机器人壳体内的左、右两侧对称安装两个凸轮轴,每个凸轮轴上安装一组由三个凸轮组成的复合凸轮,凸轮开有环绕在凸轮周向上的异型凸轮槽,位于左前、右中以及左后位置的三个凸轮的安装角度相同,即三个凸轮的异型凸轮槽布置方向相同,位于右前、左中以及右后位置的三个凸轮的安装角度相同,且与另外三个凸轮的异型凸轮槽布置方向相差180°;六条支腿的一端始终与对应凸轮的异型凸轮槽配合,每条支腿的末端伸出机器人壳体外;驱动机构与两个凸轮轴连接,驱动凸轮轴转动,进而驱动六条支腿运动。
2.根据权利要求1所述的基于复合凸轮结构的微型六足爬行机器人,其特征在于,支腿末端的运动轨迹与凸轮转动的关系式为:
3.根据权利要求1或2所述的基于复合凸轮结构的微型六足爬行机器人,其特征在于,所述支腿包括球头、支腿连杆和球头支撑关节;从动球位于支腿连杆的一端,且与凸轮的异型凸轮槽配合;球头支撑关节位于支腿连杆上部,球头支撑关节同时与机器人壳体转动连接形成球面副。
4.根据权利要求3所述的基于复合凸轮结构的微型六足爬行机器人,其特征在于,所述支腿连杆呈类m型结构,具有两个上凸型折弯部和位于两个上凸型折弯部的下凹型折弯部,球头支撑关节位于下凹型折弯部的折弯处。
5.根据权利要求4所述的基于复合凸轮结构的微型六足爬行机器人,其特征在于,令点a为球头的几何中心,点b为球头支撑关节的几何中心,点n为支腿末端的几何中心,点m为邻近支腿末端的上凸型折弯部的折弯点,ra为点a到b的距离,rb为点b到m的距离,rc为点m到n的距离,θ1为线段ab与水平方向的夹角,θ2为线段bm与水平方向的夹角,θ3为线段mn与竖直方向的夹角,h为点n到与支腿配合的凸轮圆心的竖直距离,e为点n到两个凸轮轴对称面的距离,l为凸轮圆心到两个凸轮轴对称面的距离,r为凸轮圆心到球头几何中心的距离,为线段bn与水平方向的夹角,则点n到b的距离rg满足式(1),点a、b的位置满足式(2),支腿在水平方向和竖直方向的运动学关系满足式(3)和(4);
6.根据权利要求1所述的基于复合凸轮结构的微型六足爬行机器人,其特征在于,所述驱动机构包括位于机器人壳体前、后端的两个驱动模块,每个驱动模块均包括驱动电机、电机支架、主动齿轮和从动齿轮;驱动电机通过电机支架安装在机器人壳体的上部,主动齿轮安装在驱动电机的输出轴上,从动齿轮安装在相应的凸轮轴上且与主动齿轮啮合。
技术总结
本发明为一种基于复合凸轮结构的微型六足爬行机器人,包括机器人壳体、支腿、凸轮、凸轮轴和驱动机构;所述机器人壳体内的左、右两侧对称安装两个凸轮轴,每个凸轮轴上安装一组由三个凸轮组成的复合凸轮,凸轮开有环绕在凸轮周向上的异型凸轮槽,位于左前、右中以及左后位置的三个凸轮的安装角度相同,位于右前、左中以及右后位置的三个凸轮的安装角度相同,且与另外三个凸轮的异型凸轮槽布置方向相差180°;六条支腿的一端始终与对应凸轮的异型凸轮槽配合,每条支腿的末端伸出机器人壳体外;驱动机构与两个凸轮轴连接,驱动凸轮轴转动,进而驱动六条支腿运动。结构简单新颖,通过凸轮建立驱动机构与支腿之间的联系,将凸轮的旋转运动转换为支腿在空间中的运动,实现机器人的爬行。
技术研发人员:武毅男,邓皓月,方勇纯,刘华旺,白一凡
受保护的技术使用者:南开大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!