一种用于EPS控制器的电机主动降速及安全关断方法与流程
本发明涉及电动助力转向系统,具体地说是一种用于eps控制器的电机主动降速及安全关断方法。
背景技术:
1、当电动助力转向系统控制器检测到故障发生时,需要关闭控制器断开mosfet。若此时电动助力转向系统的电机为高速转动状态,会释放能量,产生电流,并形成反向电动势。
2、当反向电动势电压超过mosfet最大额定耐压值后,mosfet将进入雪崩模式。此时,当电机线圈释放的能量大于mosfet耐受的雪崩能量时,mosfet将被击穿损坏。
3、目前,解决上述问题主要是通过优化电路或优化电机特性来实现的。但是,优化电路存在电路结构复杂的缺点,优化电机特性存在成本高昂且工艺复杂的缺点。
4、因此,需要设计一种用于eps控制器的电机主动降速及安全关断方法,在不改变现有电路结构的情况下,实现安全关断。
技术实现思路
1、本发明的目的是克服现有技术的不足,提供了一种用于eps控制器的电机主动降速及安全关断方法,在不改变现有电路结构的情况下,实现安全关断。
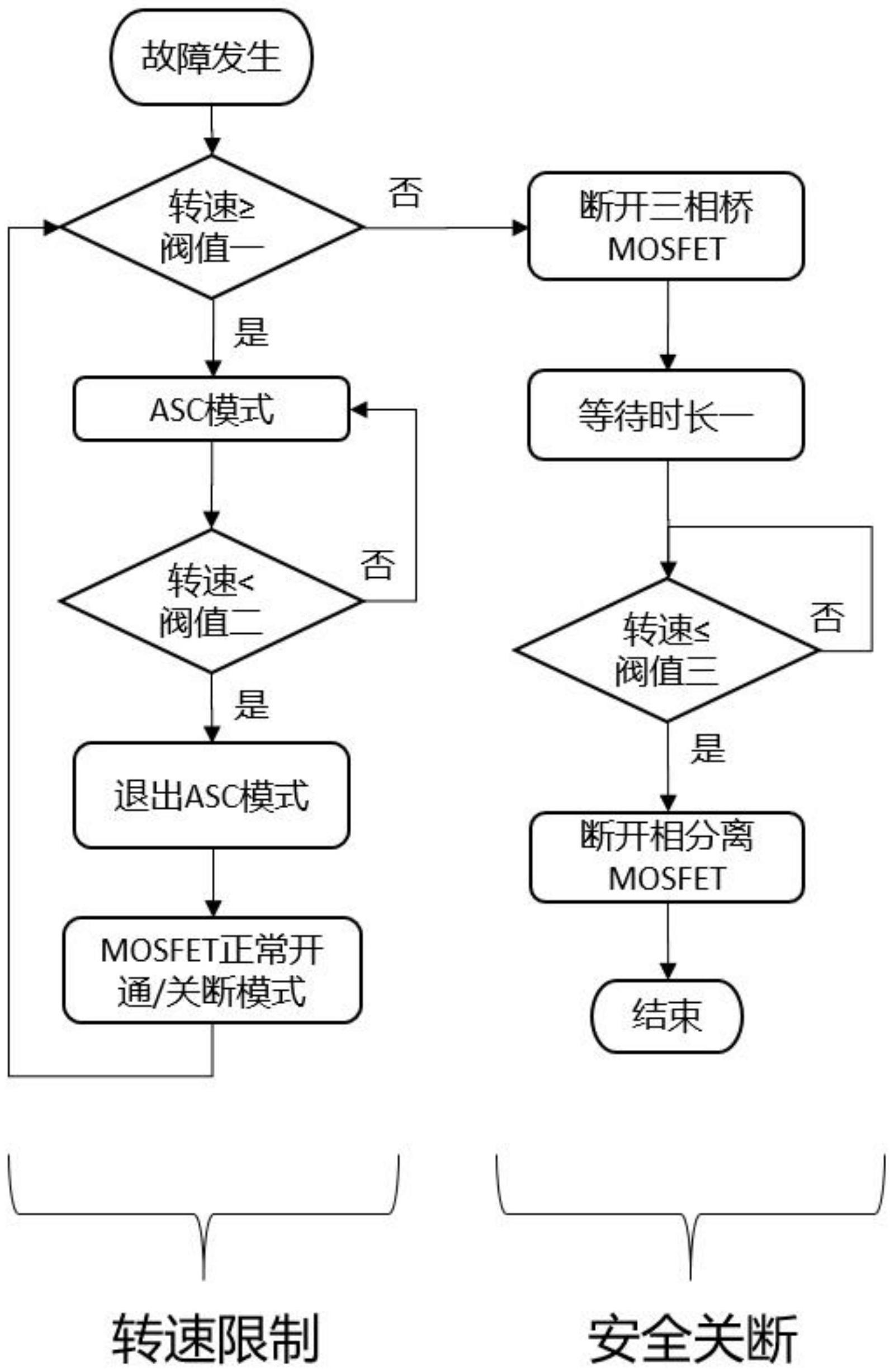
2、为了达到上述目的,本发明一种用于eps控制器的电机主动降速及安全关断方法,包括如下步骤:步骤1,微处理器mcu检测系统是否发生故障,如发生故障,则继续进行步骤2;步骤2,电机位置传感器rps将检测到的电机转速实时发送给微处理器mcu,微处理器mcu将获得的电机转速与预先设定的转速阀值一和/或转速阀值二进行比较,如电机转速≥转速阀值一,则继续进行步骤3,如电机转速<转速阀值一,且电机转速≥转速阀值二,则继续进行步骤5;步骤3,控制器进入asc模式,微处理器mcu发送控制指令给预驱芯片,预驱芯片控制三相桥三个上桥mosfet断开、三个下桥mosfet导通,电机主动降速;步骤4,等待电机转速下降,微处理器mcu将获得的电机转速与预先设定的转速阀值二进行比较,如电机转速<转速阀值二,则控制器退出asc模式,微处理器mcu发送控制指令给预驱芯片,预驱芯片控制三相桥mosfet恢复正常的导通和关断模式,电机恢复正常转动;步骤5,微处理器mcu发送控制指令给预驱芯片,预驱芯片控制三相桥全部mosfet断开;步骤6,等待不小于续流时长的时间后,微处理器mcu将获得的电机转速与预先设定的转速阀值三进行比较,如电机转速>转速阀值三,则继续保持续流,直到电机转速=转速阀值三,继续进行步骤7,如电机转速≤转速阀值三,则继续进行步骤7;步骤7,微处理器mcu发送控制指令给相分离驱动芯片,相分离驱动芯片控制三相相分离mosfet断开。
3、所述的微处理器mcu的控制信号输出端一与预驱芯片的控制信号输入端连接,预驱芯片的控制信号输出端一与三相桥上桥三个mosfet的栅极连接,预驱芯片的控制信号输出端二与三相桥下桥三个mosfet的栅极连接,三相桥上桥三个mosfet的源极分别依次与三相桥下桥三个mosfet的漏极连接,三相桥下桥三个mosfet的漏极分别依次与三相相分离mosfet的漏极连接,三相相分离mosfet的栅极与相分离驱动芯片的控制信号输出端连接,相分离驱动芯片的控制信号输入端与微处理器mcu的控制信号输出端二连接,三相相分离mosfet的源极分别与电机的三个相线连接,电机上设置有电机位置传感器rps,电机位置传感器rps的电机转速信号输出端与微处理器mcu的电机转速信号输入端连接。
4、所述的三相桥上桥三个mosfet的漏极与电池的正极连接,电池的负极接地。
5、所述的三相桥下桥三个mosfet源极分别与三个采样电阻连接后,接地。
6、所述的转速阀值一为5500rpm~6000rpm。
7、所述的转速阀值二为4800rpm~5300rpm。
8、所述的转速阀值三为2500rpm~4000rpm。
9、所述的续流时长为10ms~100ms。
10、本发明同现有技术相比,增加了系统策略,从而在不改变现有电路结构的情况下,实现电机主动降速及安全关断,避免了mosfet将被击穿损坏。本发明降低了安全关断的成本、也简化了工艺。
技术特征:
1.一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:包括如下步骤:
2.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的微处理器mcu的控制信号输出端一与预驱芯片的控制信号输入端连接,预驱芯片的控制信号输出端一与三相桥上桥三个mosfet的栅极连接,预驱芯片的控制信号输出端二与三相桥下桥三个mosfet的栅极连接,三相桥上桥三个mosfet的源极分别依次与三相桥下桥三个mosfet的漏极连接,三相桥下桥三个mosfet的漏极分别依次与三相相分离mosfet的漏极连接,三相相分离mosfet的栅极与相分离驱动芯片的控制信号输出端连接,相分离驱动芯片的控制信号输入端与微处理器mcu的控制信号输出端二连接,三相相分离mosfet的源极分别与电机的三个相线连接,电机上设置有电机位置传感器rps,电机位置传感器rps的电机转速信号输出端与微处理器mcu的电机转速信号输入端连接。
3.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的三相桥上桥三个mosfet的漏极与电池的正极连接,电池的负极接地。
4.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的三相桥下桥三个mosfet源极分别与三个采样电阻连接后,接地。
5.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的转速阀值一为5500rpm~6000rpm。
6.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的转速阀值二为4800rpm~5300rpm。
7.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的转速阀值三为2500rpm~4000rpm。
8.根据权利要求1所述的一种用于eps控制器的电机主动降速及安全关断方法,其特征在于:所述的续流时长为10ms~100ms。
技术总结
本发明涉及电动助力转向系统技术领域,具体地说是一种用于EPS控制器的电机主动降速及安全关断方法。本发明同现有技术相比,增加了系统策略,从而在不改变现有电路结构的情况下,实现电机主动降速及安全关断,避免了MOSFET将被击穿损坏。本发明降低了安全关断的成本、也简化了工艺。
技术研发人员:吴夏青,邢锦鹏,景彩云,马洪顺,马海杰,查义炜
受保护的技术使用者:博世华域转向系统有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!