一种约束可变的磁驱动机器人
本发明涉及机器人,具体涉及一种约束可变的磁驱动机器人。
背景技术:
1、传统的机器人设计通常基于轮式或腿部结构,适用于平坦的表面或标准的工作环境。然而,在某些场景下,如管道内、高压环境等复杂环境中,这些传统机器人往往面临着困难或无法适应的问题,无法进行高效移动。
2、从墨西哥跳豆的结构可以得出,内部幼虫腿紧紧抓住豆子内壁,此端作为固定端,幼虫头部猛烈撞击豆子内壁,此位置为受力端,此力使得豆子能够跳跃一定的高度;当幼虫在内部滚动时,由于豆子整体的重心发生了改变使得豆子产生滚动。
3、针对墨西哥跳豆的原理和结构,分析其仿生结构,开始探索基于磁驱动的新型机器人设计。
技术实现思路
1、有鉴于此,本发明提供了一种约束可变的磁驱动机器人,能够实现在复杂环境的跳动与移动。
2、本发明采用的技术方案如下:
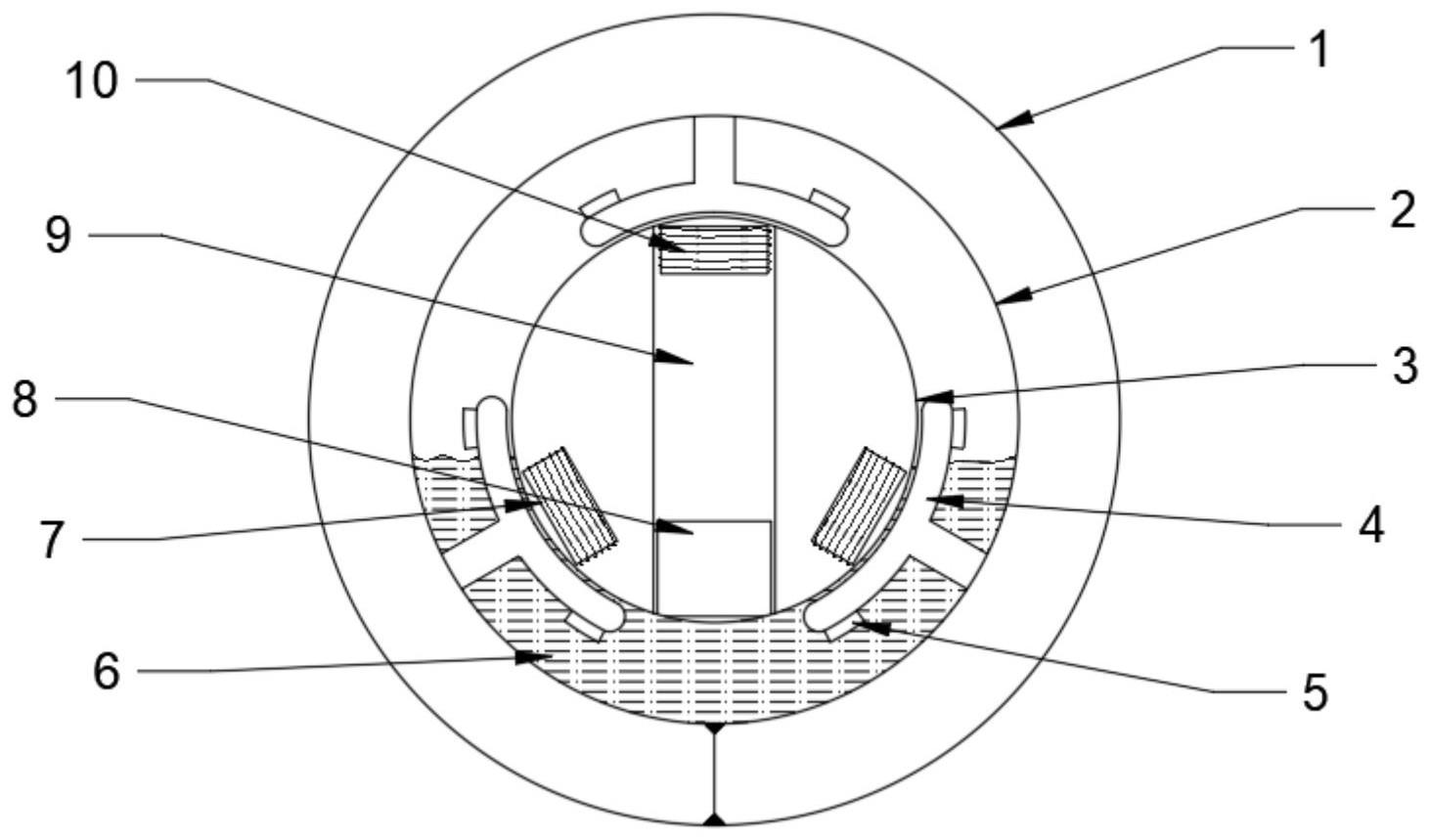
3、一种约束可变的磁驱动机器人,所述磁驱动机器人为三层式球型壳体结构,包括内壳、中壳、外壳、支撑件、磁流体、软磁体、运动电磁铁、跳跃模块以及控制模块;
4、所述中壳、外壳固定连接,所述中壳通过支撑件支撑内壳,内壳可绕中壳的球心转动;三块运动电磁铁均布在内壳下半球内壁,且三块运动电磁铁处于同一水平面上;所述磁流体设置在中壳内,所述软磁体设置在支撑件上,且所述软磁体与运动电磁铁位置对应;所述跳跃模块两端固定在内壳内且过内壳球心;所述控制模块设置在内壳中,通过控制运动电磁铁、跳跃模块通电分别实现磁驱动机器人的滚动及跳跃。
5、进一步地,所述跳跃模块包括导向柱、软磁铁冲击块及跳跃线圈;
6、所述导向柱两端固定在内壳内且过内壳球心,所述软磁铁冲击块、跳跃线圈位于导向柱两端,所述跳跃线圈固定在内壳上半球内壁,所述软磁铁冲击块在磁场作用下与跳跃线圈相吸,冲击内壳完成跳跃。
7、进一步地,通过改变跳跃模块的磁场大小使磁驱动机器人产生不同高度的跳跃。
8、进一步地,所述支撑件包括三个以上弧形支手,均匀分布在内壳与中壳之间;弧形支手为支杆ⅰ与弧形支撑部一体化结构。
9、进一步地,所述支撑件为支杆ⅱ与球形支撑部一体化结构,支杆ⅱ采用三个以上,均匀分布在球形支撑部与中壳之间,球形支撑部与内壳之间设有润滑液。
10、有益效果:
11、1、本发明球型磁驱动机器人内壳与中壳由于运动电磁铁对软磁体和磁流体的吸引力而紧密贴合,改变约束,利用磁力冲击和磁流体偏移来实现跳动与移动。磁流体是一种具有高流动性和可控性的特殊液体,它可以通过磁场的作用产生推力,驱动机器人前进。这种推进方式不需要传统机器人中的传动机构,效率高,且机器人可以实现无接触运动,避免了摩擦和磨损,减少了机械故障的风险和传动损耗,球型结构抗压强度高,能够在液体、气体和其他复杂环境中自由移动,如水下、油井、管道等,这种环境适应性使得球形磁流体机器人在工业、救援、探险等领域具有广阔的应用前景。
12、其次,由于磁力和磁流体的可控性,可以对本发明机器人的运动进行精确控制。磁力和磁流体可以根据需要调整,使机器人能够在狭小的空间中进行高度精确的操作。这种精度优势使得本发明球型磁驱动机器人在需要精细定位和操作的任务中表现出色。
13、2、磁流体具有可控性和高流动性,通过改变运动电磁铁的磁场改变磁流体的位置,本发明机器人可以在任意方向上移动,并且可以自由转动,不受传统机器人的转向角度限制,这使得机器人能够在复杂的环境中灵活导航和操作。而且,通过改变跳跃模块的磁场大小可以使机器人产生不同高度的跳跃。因此本发明磁驱动机器人可以在不平坦的地面上自由移动,克服障碍物,适应各种工作场景。
14、3、本发明支撑件结构巧妙,运动噪音小。
技术特征:
1.一种约束可变的磁驱动机器人,其特征在于,所述磁驱动机器人为三层式球型壳体结构,包括内壳、中壳、外壳、支撑件、磁流体、软磁体、运动电磁铁、跳跃模块以及控制模块;
2.如权利要求1所述的约束可变的磁驱动机器人,其特征在于,所述跳跃模块包括导向柱、软磁铁冲击块及跳跃线圈;
3.如权利要求1所述的约束可变的磁驱动机器人,其特征在于,通过改变跳跃模块的磁场大小使磁驱动机器人产生不同高度的跳跃。
4.如权利要求1-3任一所述的约束可变的磁驱动机器人,其特征在于,所述支撑件包括三个以上弧形支手,均匀分布在内壳与中壳之间;弧形支手为支杆ⅰ与弧形支撑部一体化结构。
5.如权利要求1-3任一所述的约束可变的磁驱动机器人,其特征在于,所述支撑件为支杆ⅱ与球形支撑部一体化结构,支杆ⅱ采用三个以上,均匀分布在球形支撑部与中壳之间,球形支撑部与内壳之间设有润滑液。
技术总结
本发明公开了一种约束可变的磁驱动机器人,该磁驱动机器人为三层式球型壳体结构,包括内壳、中壳、外壳、支撑件、磁流体、软磁体、运动电磁铁、跳跃模块以及控制模块;中壳、外壳固定连接,中壳通过支撑件支撑内壳,内壳可绕中壳的球心转动;三块运动电磁铁均布在内壳下半球内壁,且三块运动电磁铁处于同一水平面上;磁流体设置在中壳内,软磁体设置在支撑件上,且软磁体与运动电磁铁位置对应;跳跃模块两端固定在内壳内且过内壳球心;控制模块设置在内壳中,通过控制运动电磁铁、跳跃模块通电分别实现磁驱动机器人的滚动及跳跃。本发明能够实现在复杂环境的跳动与移动。
技术研发人员:孟晓伟,贺可太,淦勇勇,周志鹏,翟晨龙,沈斯佳,董浩
受保护的技术使用者:北京科技大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!