一种柴电增程式全地形无人突击车的制作方法
本申请属于无人突击车,更具体地说,是涉及一种柴电增程式全地形无人突击车。
背景技术:
1、无人突击车是指在地面上行驶的能执行特定任务的机器人,是机械化、信息化、智能化高度融合的地面机动无人作战平台,是配备侦察探测系统、小口径武器,具有高机动越野性能和必要防护能力的地面无人装备系统。
2、国内外已经研制了多种一般装配履带式底盘的无人突击车,但存在以下几点缺点:(1)动力系统一般为燃油、纯电或混动,然而传统内燃机油耗高,碳排放量大;纯电动又存在充电和续航上的不足;混动成本太高,不利于小型战车的使用。(2)减震系统常为带平衡轴结构的悬挂油缸配合悬挂扭杆,但是,悬挂油缸的刚度无法满足车辆转弯或刹车时的刚度需求,且扭杆悬挂受载荷振动后很难达到平稳,不利于车辆的操作稳定性和行驶平顺性;(3)设置在车体内部的卷绕机构占用空间大,导致车身体积过大,不利于适应狭小的工作空间。
技术实现思路
1、本发明就是为了解决上述背景技术的不足,提供了一种节能减排、动力充足、安全稳定,且能够实现快速突击、隐蔽、侦查、救援、物资运输等功能的柴电增程式全地形无人突击车。
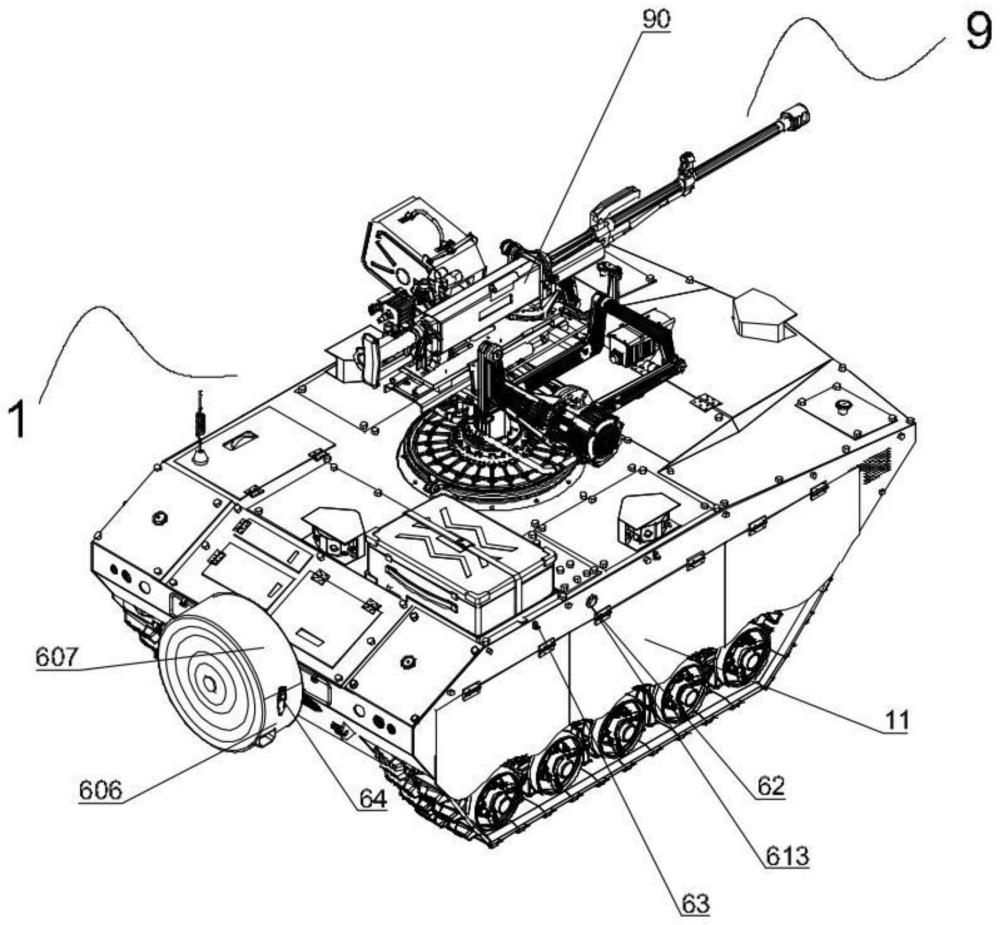
2、为此,本发明提供了一种柴电增程式全地形无人突击车,包括履带式装甲底盘和武器控制机构,所述履带式装甲底盘包括车架、设于车架内部的动力驱动机构和转向机构、设于车架下方的履带行走机构和减震悬挂机构和与车架连接的分体式卷绕机构。
3、优选地,所述动力驱动机构设于转向机构的前方,所述传动机构包括柴油机、和柴油机传动连接的发电机和与发电机电连接的动力电池,所述转向机构包括差速器和驱动轮,所述驱动轮设于所述差速器的两侧,所述差速器和驱动轮之间且靠近驱动轮的位置设有刹车盘。
4、优选地,所述履带行走机构包括滚轮机构、围绕着滚轮机构的履带和设于履带中间部的平衡悬架,所述滚轮机构包括涨紧轮组件,所述涨紧组件包括涨紧轮、前叉和伸缩组件,所述涨紧轮与履带啮合,所述涨紧轮通过前叉连接伸缩组件。
5、优选地,所述涨紧组件还包括支撑件,所述支撑件内部设有滑槽,所述前叉和伸缩组件与滑槽滑动连接,所述伸缩组件包括涨紧螺杆和套设涨紧螺杆上的涨紧弹簧,所述涨紧弹簧靠近所述前叉的一端连接活动块,所述涨紧弹簧远离所述前叉的一端连接固定块。
6、优选地,所述减震悬挂机构包括减震组件和悬挂组件,所述减震组件垂直悬挂于所述平衡悬架和设于平衡悬架下方的支重轮之间,所述减震组件包括减震连杆和套设减震连杆上的第一液压避震簧。
7、优选地,所述减震组件的邻测设有支臂,所述支臂的上下两端分别与平衡悬架和支重轮活动连接。
8、优选地,所述悬挂组件设于车架和平衡悬架之间,所述悬挂组件包括悬挂连杆、第二液压避震簧和摇臂组件,所述第二液压弹簧套设于所述悬挂连杆上,所述悬挂连杆通过摇臂组件连接平衡悬架和车架。
9、优选地,所述摇臂组件包括第一固定座、第二固定座、连接座和摇臂,所述连接座通过第一固定座连接悬挂连杆,所述连接座的下端销接两个摇臂,两个摇臂通过销轴连接第二固定座,且两个摇臂和销轴构成三角结构。
10、优选地,所述分体式卷绕机构包括设于车架内侧的驱动组件和设于车架外侧且与车架可拆卸连接的卷绕组件,所述卷绕组件包括固定支架和与固定支架连接卷线放置盘,所述卷线放置盘的中心贯穿设有卷绕轴,所述卷绕轴内设有多个支撑杆,所述卷绕放置盘的后侧中心处固定第一固定环,所述卷绕轴内的多个支撑杆延伸至第一固定环外,所述驱动机构包括驱动电机和驱动连接的转动轴,所述转动轴一端设有多个连接。
11、优选地,所述卷绕组件和所述驱动组件连接的车架外侧均设有至少两个环形卡扣,所述卷线放置盘周向设有第一支撑外框和第二支撑外框,所述第一支撑外框与卷线所述是放置盘固定连接,所述第二支撑外框一侧活动连接第一支撑外框,所述第二支撑外框另一侧通过连接扣连接第二支撑外框。
12、本发明的有益效果为:
13、(1)本发明提供了一种柴电增程式全地形无人突击车 ,其设有转向机构和传动机构,传动机构和转向机构的配合设计,一方面,在柴电增程模式下,当动力电池内的电量达到一定数值时,柴油机通过控制系统控制启动,给动力电池充电,动力电池将电能传递给转向机构,此时车辆可以通过差速器和驱动轮的配合实现左右转向,利用刹车盘可以实现迅速停车和原地360°旋转,续航里程长,避免了车辆长距离奔驰而因动能不足无法返回的情况。且柴油机不会一直工作,当动力电池的电量足够时,电子控制系统就会控制柴油机停止工作,此时只有电动机来驱动车辆行走,噪音小,更利于车辆隐蔽。既能满足用电需求,又无需柴油机一直启动,节省了能源,延长了寿命。另一方面,采用第一驱动电机驱动差速器的电传动结构替代了原有的电动机直接驱动两侧车轮的结构设计,通过差速器带动驱动轮实现左右行使转向,避免了车辆转向行驶时依赖驱动电机控制的弊端,通过刹车盘来实现精准刹车和原地360°转向,避免了原有电机直接驱动带来的刹车不精准问题。
14、(2)本发明提供了一种柴电增程式全地形无人突击车,其设有履带行走机构,履带行走机构包括涨紧轮组件,涨紧轮组件包括涨紧轮、前叉和伸缩组件,通过伸缩组件和前叉的配合,提供涨紧轮张紧力,从而调整履带的松紧程度,保证车辆平稳运行。
15、(3)本发明提供了一种柴电增程式全地形无人突击车,其设有减震悬挂机构,减震悬挂机构包括减震组件和悬挂组件,利用减震组件,将支重轮的垂直运动转化第一液压避震簧的伸缩,由此产生的弹性形变提供给车辆支撑力,具有较长的避震行程,减轻不平路面对车辆的颠覆,实现一级减震的效果,改善车辆行驶的平顺性和舒适性;利用悬挂组件,有效降低了复杂路况带来的车身的震动和冲击。通过减震悬挂机构,能够同时缓冲不平路面和复杂路况带来的车辆震动和冲击,达到二级减震的效果,保证了车辆行驶的稳定性和安全性。
16、(4)本发明提供了一种柴电增程式全地形无人突击车,其设有分体式卷绕机构,将卷绕组件和驱动组件分体设置,其中,卷绕组件可拆卸连接于车架外侧。卷绕时,通过支撑杆和连接孔的连接,将卷绕组件和驱动组件组合使用;卷绕完毕后,将卷绕组件拆卸,安装于车架后方外侧,这种分体设置方式,增加了卷绕机构的机动灵活性,使用方便且节省了卷绕机构占用的空间,有利于本发明中的全地形无人突击车适应狭小的工作空间。
技术特征:
1.一种柴电增程式全地形无人突击车,包括履带式装甲底盘和武器控制机构,其特征在于:所述履带式装甲底盘包括车架、设于车架内部的动力驱动机构和转向机构、设于车架下方的履带行走机构和减震悬挂机构和与车架连接的分体式卷绕机构。
2.根据权利要求1所述的柴电增程式全地形无人突击车,其特征在于:所述传动机构设于转向机构的前方,所述传动机构包括柴油机、和柴油机传动连接的发电机和与发电机电连接的动力电池,所述转向机构包括差速器和驱动轮,所述驱动轮设于所述差速器的两侧,所述差速器和驱动轮之间且靠近驱动轮的位置设有刹车盘。
3.根据权利要求1所述的柴电增程式全地形无人突击车,其特征在于:所述履带行走机构包括滚轮机构、围绕着滚轮机构的履带和设于履带中间部的平衡悬架,所述滚轮机构包括涨紧轮组件,所述涨紧组件包括涨紧轮、前叉和伸缩组件,所述涨紧轮与履带啮合,所述涨紧轮通过前叉连接伸缩组件。
4.根据权利要求3所述的柴电增程式全地形无人突击车,其特征在于:所述涨紧组件还包括支撑件,所述支撑件内部设有滑槽,所述前叉和伸缩组件与滑槽滑动连接,所述伸缩组件包括涨紧螺杆和套设涨紧螺杆上的涨紧弹簧,所述涨紧弹簧靠近所述前叉的一端连接活动块,所述涨紧弹簧远离所述前叉的一端连接固定块。
5.根据权利要求1所述的柴电增程式全地形无人突击车,其特征在于:所述减震悬挂机构包括减震组件和悬挂组件,所述减震组件垂直悬挂于所述平衡悬架和设于平衡悬架下方的支重轮之间,所述减震组件包括减震连杆和套设减震连杆上的第一液压避震簧。
6.根据权利要求5所述的柴电增程式全地形无人突击车,其特征在于:所述减震组件的邻测设有支臂,所述支臂的上下两端分别与平衡悬架和支重轮活动连接。
7.根据权利要求5所述的柴电增程式全地形无人突击车,其特征在于:所述悬挂组件设于车架和平衡悬架之间,所述悬挂组件包括悬挂连杆、第二液压避震簧和摇臂组件,所述第二液压弹簧套设于所述悬挂连杆上,所述悬挂连杆通过摇臂组件连接平衡悬架和车架。
8.根据权利要求7所述的柴电增程式全地形无人突击车,其特征在于:所述摇臂组件包括第一固定座、第二固定座、连接座和摇臂,所述连接座通过第一固定座连接悬挂连杆,所述连接座的下端销接两个摇臂,两个摇臂通过销轴连接第二固定座,且两个摇臂和销轴构成三角结构。
9.根据权利要求1所述的柴电增程式全地形无人突击车,其特征在于:所述分体式卷绕机构包括设于车架内侧的驱动组件和设于车架外侧且与车架可拆卸连接的卷绕组件,所述卷绕组件包括固定支架和与固定支架连接卷线放置盘,所述卷线放置盘的中心贯穿设有卷绕轴,所述卷绕轴内设有多个支撑杆,所述卷绕放置盘的后侧中心处固定第一固定环,所述卷绕轴内的多个支撑杆延伸至第一固定环外,所述驱动机构包括驱动电机和驱动连接的转动轴,所述转动轴一端设有多个连接孔。
10.根据权利要求9所述的柴电增程式全地形无人突击车,其特征在于:所述卷绕组件和所述驱动组件连接的车架外侧均设有至少两个环形卡扣,所述卷线放置盘周向设有第一支撑外框和第二支撑外框,所述第一支撑外框与卷线所述是放置盘固定连接,所述第二支撑外框一侧活动连接第一支撑外框,所述第二支撑外框另一侧通过连接扣连接第二支撑外框。
技术总结
本发明提供了一种柴电增程式全地形无人突击车,其解决了现有的突击车存在动力不足、稳定性差的技术问题,其包括履带式装甲底盘和设于所述履带式装甲底盘上方的武器控制机构,所述履带式装甲底盘包括车架、设于车架内部的动力驱动机构和转向机构、设于车架下方的履带行走机构和平衡减震悬挂机构和与车架连接的分体式卷绕机构。本发明可广泛应用于突击车技术领域。
技术研发人员:宋好文,王霞,牛帅锋,王治强,宋川
受保护的技术使用者:乳山市瑞鑫机械有限公司
技术研发日:
技术公布日:2024/8/26
- 还没有人留言评论。精彩留言会获得点赞!