轮履结合绕桥摆动式丘陵山地作业平台的制作方法
本发明涉及林内机械化作业领域,更具体地说,涉及一种轮履结合绕桥摆动式丘陵山地作业平台。
背景技术:
1、中国国土面积大,森林覆盖面积广,林区作业场合多,但林区地形复杂多变,道路崎岖不平,车辆无法驶入林区作业,人工劳动成本高,安全性低。
2、实现林区安全高效作业对林用动力车的通过性、稳定性、安全性提出更高的要求,公开(公告)号为cn103350726a的发明就公开了一种适于林地作业的机器人底盘,包括操作机构、车架、变速箱、前履带轮、后履带轮、链轮输入轴、转向离合器、输出轴、链轮机构和联轴器组件;所述车架为中间下凹式结构,所述联轴器组件通过车架轴承座连接固定在车架上,所述联轴器组件包括前桥联轴器组件和后桥联轴器组件;所述变速箱设置在所述车架的下凹前部,所述变速箱、前桥联轴器组件、前履带轮顺序连接,将所述变速箱输出的动力经由前桥联轴器组件传递前履带轮,组成前桥驱动;所述链轮机构连接在所述前履带轮和后履带轮之间,用于将动力传输给后履带轮,形成四轮驱动;所述变速箱为带有离合器和换挡功用的多用途变速箱,用于底盘行驶过程中的转向和变速。这种机器人虽然底盘重心低,运动平稳性好,越障能力强,但是仍然难以适应林地复杂的地形。
3、因此,提供一种林内作业平台,以解决现有普通林用动力车难以适应林地复杂地形的问题,十分有必要。
技术实现思路
1、有鉴于此,本发明针对林区复杂地形,提出了一种轮履结合绕桥摆动式丘陵山地作业平台,其具体技术方案如下:
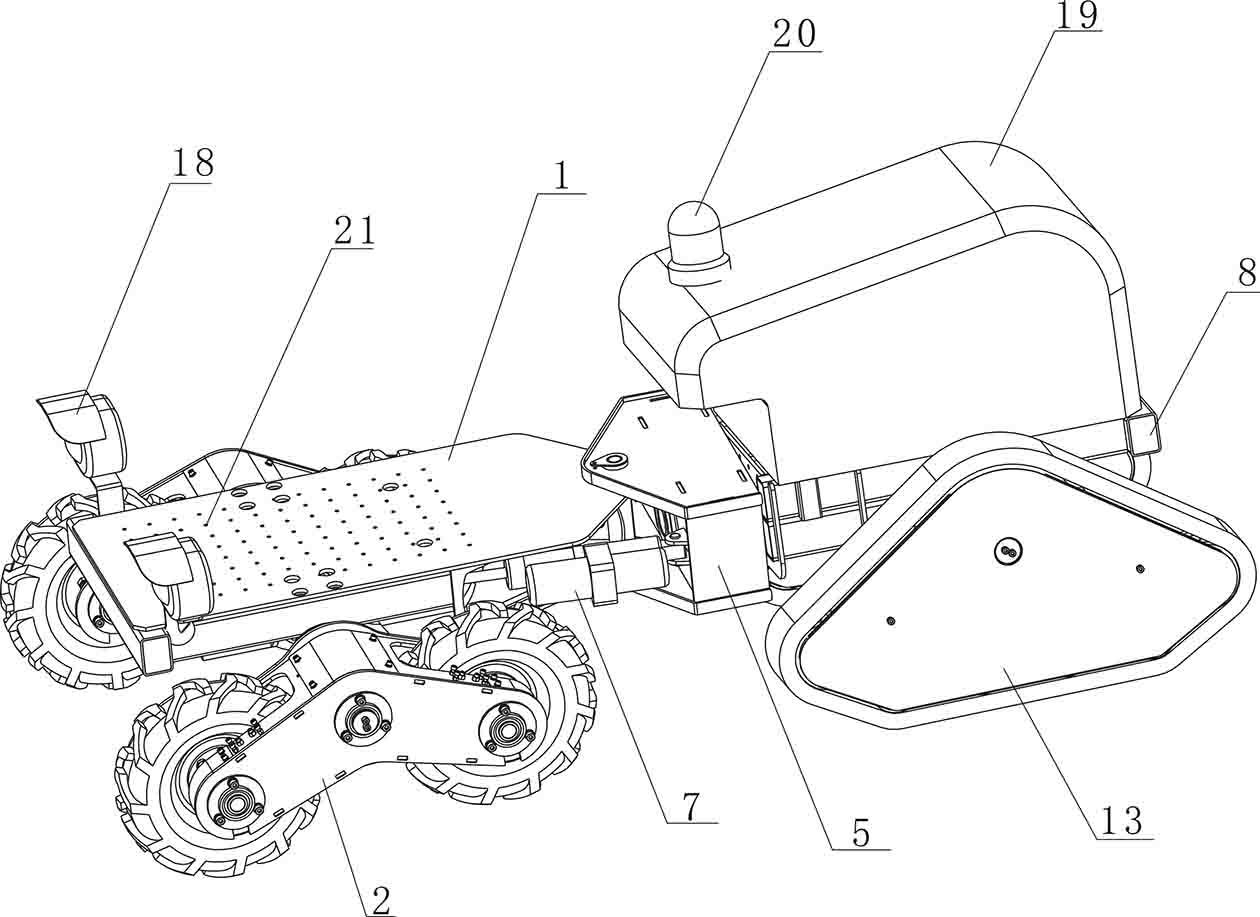
2、一种轮履结合绕桥摆动式丘陵山地作业平台,包括:
3、前架体,所述前架体的底部左右两侧安装有轮组件,前桥组件通过固定夹连接在所述前架体的底部,并与所述轮组件转动连接;所述前桥组件由与其相连接的前侧电机驱动,并将所述前侧电机输出的动力传递给所述轮组件;
4、中架体,所述前架体与所述中架体之间通过连接立轴转动连接,并且所述前架体与所述中架体之间连接有控制所述前架体转动角度的转向电动油缸,所述转向电动油缸的伸缩杆端与所述前架体的后侧转动连接,所述转向电动油缸的缸体端与所述中架体的前侧转动连接;
5、后架体,所述中架体与所述后架体之间通过前后方向布置的连接横轴转动连接,所述后架体的前侧固定有向前延伸的限位轴,所述中架体的后侧固定有限位板,所述限位板上开设有供所述限位轴插入并限制所述中架体扭转角度的弧形孔;所述后架体的底部左右两侧安装有履带组件,后桥组件通过固定夹连接在所述后架体的底部,并与所述履带组件转动连接;所述后桥组件由与其相连接的后侧电机驱动,并将所述后侧电机输出的动力传递给所述履带组件;所述后架体的上表面安装固定有蓄电池以及与所述蓄电池电连接的控制箱,所述前侧电机与所述后侧电机分别与所述控制箱电连接。
6、通过采用上述技术方案,本发明一种轮履结合绕桥摆动式丘陵山地作业平台具有良好的爬坡越障和扩展性能,复杂路况下通过性好、稳定性高、安全性强,同时能保持车身处于动态稳定平衡状态,可满足林地复杂立地条件下的使用需求。
7、优选地,所述前架体的前端左右两侧上方安装有与所述控制箱电连接的行驶灯。
8、优选地,所述后架体的上方整体罩设有机器罩壳,所述机器罩壳的顶端安装有与所述控制箱电连接的作业灯。
9、优选地,所述前架体中间的上板面上开设有多个用以连接安装外部设备的安装孔。
10、优选地,所述前架体的后端与所述中架体的前端均为三角形结构,两个所述三角形结构交叉设置,并由所述连接立轴竖向贯穿连接。
11、优选地,所述转向电动油缸设置有一个或者两个,当设置一个所述转向电动油缸时,该油缸设于所述连接立轴的左侧或者右侧;当设置两个所述转向电动油缸时,这两个油缸对称设于所述连接立轴的左侧及右侧。
12、优选地,所述限位轴设有两个,分设于所述连接横轴的左右侧,所述限位板上开设有与两个所述限位轴分别对应的两个所述弧形孔。
13、优选地,所述连接横轴通过后方的锁紧螺母限位连接于所述后架体上。
14、优选地,所述蓄电池为锂电池。
15、优选地,所述控制箱与外部的遥控装置通信连接。
16、通过采用上述技术方案,相较于现有技术,本发明具有以下有益效果:
17、1、本发明设计出了一种新型连接结构,架体可折腰、可摆动,整车前后端采用双转轴连接方式,通过转向电动油缸的伸缩能够实现整车的折腰转向,沿连接横轴长度轴线方向扭转能增加整车与地面的接触面积,避免作业平台在林间作业时出现前后车轮悬空,增强作业平台在林间崎岖地形下的通过能力。
18、2、轮组件和履带组件可绕桥转动,左右两侧结构彼此独立,两组轮和两组履带的旋转角度不受对侧影响,可交叉摆动。在林间作业时,地形高低起伏不平,轮组件、履带组件上下摆动使两侧车轮、履带与地面紧密接触,防止车轮悬空,实现作业平台的动态调平,有利于作业平台的爬坡和越障。前后架体在车体长度轴线方向可扭转,保证轮胎、履带与地面充分接触,仿地形行走,在连续颠簸路面时,作业平台上升或下降幅度较小,保持车身在运动过程中相对平稳;轮和履带摆动角度大,接近角和离开角大,能适应攀爬大坡地和高障碍物,具有较强的攀爬能力。
19、3、本发明兼有轮式和履带式的优点,兼顾轮式的高机动性、速度快、转向灵活,履带式的高通过性和稳定性,在复杂地形上行驶性能优越,具有良好的越野性能,能够适应各种恶劣地形,是适用于多种场合和复杂环境下的一种轮履结合绕桥摆动式丘陵山地作业平台。
20、4、本发明结构简单、重心低、可遥控控制,安全可靠,容易操作,该车作为一个多功能平台,还可以在前架体上安装采摘头、旋耕机、打草机、施肥打药等设备,其扩展功能好,可实现一机多用,满足林间作业的不同需求,节省了劳动力,提高了工作效率。
技术特征:
1.一种轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,包括:
2.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述前架体的前端左右两侧上方安装有与所述控制箱电连接的行驶灯。
3.根据权利要求1或2所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述后架体的上方整体罩设有机器罩壳,所述机器罩壳的顶端安装有与所述控制箱电连接的作业灯。
4.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述前架体中间的上板面上开设有多个用以连接安装外部设备的安装孔。
5.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述前架体的后端与所述中架体的前端均为三角形结构,两个所述三角形结构交叉设置,并由所述连接立轴竖向贯穿连接。
6.根据权利要求1或5所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述转向电动油缸设置有一个或者两个,当设置一个所述转向电动油缸时,该油缸设于所述连接立轴的左侧或者右侧;当设置两个所述转向电动油缸时,这两个油缸对称设于所述连接立轴的左侧及右侧。
7.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述限位轴设有两个,分设于所述连接横轴的左右侧,所述限位板上开设有与两个所述限位轴分别对应的两个所述弧形孔。
8.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述连接横轴通过后方的锁紧螺母限位连接于所述后架体上。
9.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述蓄电池为锂电池。
10.根据权利要求1所述的轮履结合绕桥摆动式丘陵山地作业平台,其特征在于,所述控制箱与外部的遥控装置通信连接。
技术总结
本发明涉及林内机械化作业领域,公开了一种轮履结合绕桥摆动式丘陵山地作业平台,包括前架体、中架体、后架体,前架体的底部安装有轮组件,前桥组件由与其相连接的前侧电机驱动,并将前侧电机输出的动力传递给轮组件;前架体与中架体之间通过连接立轴转动连接,并且前架体与中架体之间连接有控制前架体转动角度的转向电动油缸;中架体与后架体之间通过连接横轴转动连接,后架体的底部安装有履带组件,后桥组件由与其相连接的后侧电机驱动,并将后侧电机输出的动力传递给履带组件。本发明具有良好的爬坡越障和扩展性能,复杂路况下通过性好、稳定性高、安全性强,同时能保持车身处于动态稳定平衡状态,可满足林地复杂立地条件下的使用需求。
技术研发人员:汤晶宇,周建波,寇欣,范志远,向文博
受保护的技术使用者:国家林业和草原局哈尔滨林业机械研究所
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!