人机共驾转向系统的自适应控制方法与流程
本发明涉及汽车,尤其涉及一种人机共驾转向系统的自适应控制方法。
背景技术:
1、在自动驾驶场景下,电动助力转向系统在完成基本的车道保持辅助驾驶的基础上,还需基于应用场景以及驾驶员意图做出精准、快速响应,同时保证驾驶员的驾驶感受;目前市场上的驾驶辅助系统,主要用电容方向盘或扭杆力矩超过一定值维持一段时间来判断驾驶员意图,当检测到驾驶员接管意图时,退出辅助驾驶功能,驾驶员介入感突兀,同时不足以支持紧急避让功能,无法更大程度的保证驾驶员安全。相较而言,一种支持人机共驾、支持紧急避让的转向系统控制方法能显著的提升驾驶员驾驶的平顺性、安全性。
技术实现思路
1、本发明要解决的技术问题是提供一种能人机共驾转向系统自适应控制方法,其目的是在于提升辅助驾驶功能在系统抖动时的鲁棒性,同时可以更加精准地识别驾驶员意图,从而可以平顺地协调驾驶员与高级驾驶辅助系统对转向系统的控制权,提升驾驶体验。
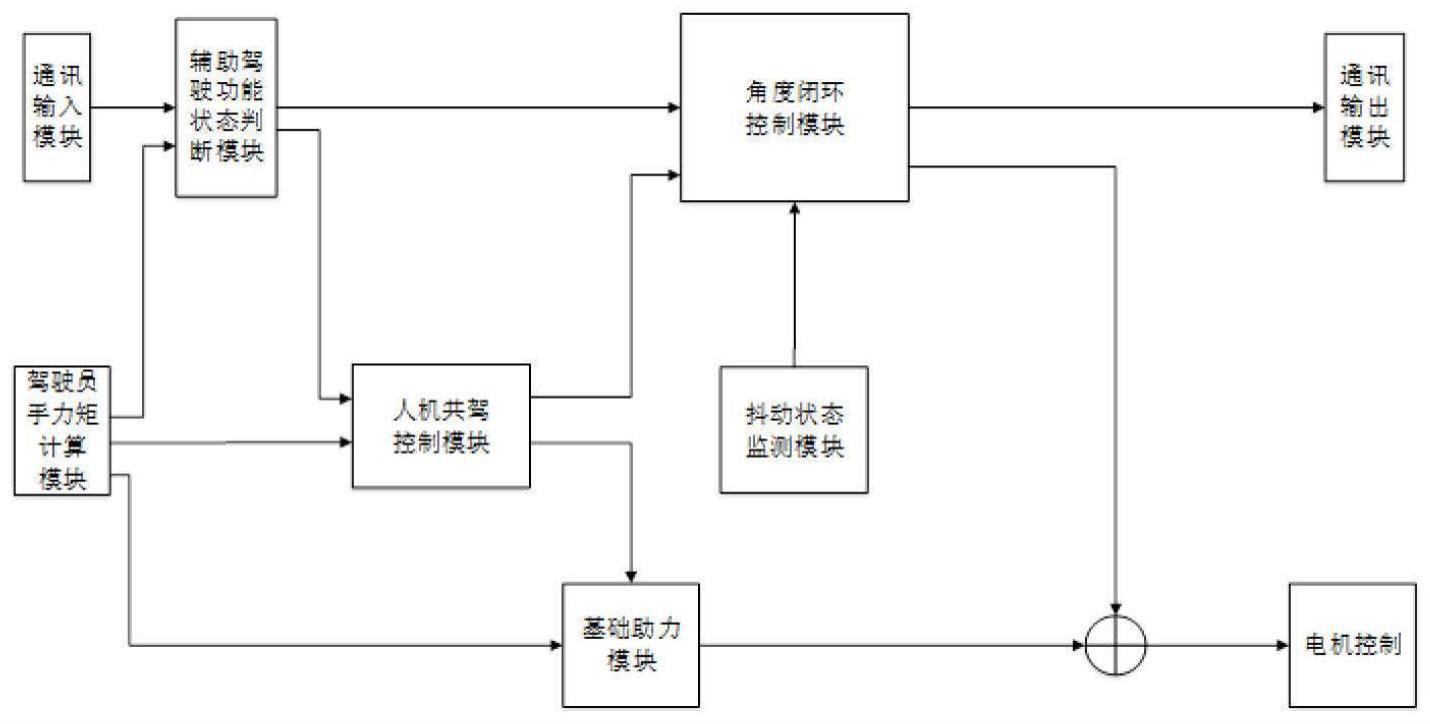
2、为解决上述技术问题,本发明提供一种人机共驾转向系统的自适应控制方法,包括:
3、步骤1,电子助力转向系统需接收驾驶辅助功能相关信号,所述驾驶辅助功能相关信号包括来自高级驾驶辅助系统的道路保持辅助系统使能信号、道路保持辅助系统请求状态、道路保持辅助系统请求角度,转向系统内部的转向系统控制单元状态、转向助力电机转子速度、助力电机转子加速度、扭杆力矩、方向盘转角速度、方向盘转角、车道偏离预警系统请求状态、车道偏离预警系统控制状态,安全车速;
4、步骤2,根据道路保持辅助系统使能信号、转向系统控制单元状态、扭杆力矩、方向盘转角、安全车速和道路保持辅助系统请求状态,判断辅助驾驶功能状态;
5、步骤3,根据助力电机转子加速度、扭杆力矩、方向盘转角和方向盘转角速度,计算驾驶员手力矩;
6、步骤4,根据道路保持辅助系统请求状态、辅助驾驶功能状态、安全车速和驾驶员手力矩,判断当前人机共驾状态;
7、步骤5,根据助力电机转子加速度、车道偏离预警系统请求状态和车道偏离预警系统控制状态,判断当前转向系统的抖动状态;
8、步骤6,根据道路保持辅助系统请求角度和方向盘转角,计算期望齿条位置和当前齿条位置;
9、步骤7,根据助力电机转子速度,计算当前齿条速度;
10、步骤8,根据当前人机共驾状态、转向系统的抖动状态、期望齿条位置、当前齿条位置和当前齿条速度,计算出转向系统期望齿条移动速度,再结合当前齿条速度,计算角度闭环控制的初始输出扭矩;
11、步骤9,根据安全车速、驾驶员手力矩、当前人机共驾状态,计算共驾调协系数;
12、步骤10,根据安全车速、角度闭环控制的初始输出扭矩、共驾调协系数,计算协调后的基础助力输出扭矩和角度闭环控制的最终输出扭矩,并对角度闭环控制的最终输出扭矩进行限幅后,将两者叠加作为转向系统助力电机最终输出扭矩。
13、与现有技术相比本发明达到的有益效果如下:
14、1.接收高级驾驶辅助系统控制器的请求状态,在支持正常车道保持辅助功能的同时,支持紧急避让功能,扩大了辅助驾驶的应用场景,保证驾驶员的安全。
15、2.能更加精准地识别驾驶员意图,从而可以平顺地协调驾驶员与高级驾驶辅助系统对转向系统的控制权,提升驾驶体验。
16、3.能够实时监测转向系统的抖动状态,能够根据抖动的剧烈程度自适应调节辅助驾驶功能的控制参数,提高辅助驾驶功能的鲁棒性。
技术特征:
1.一种人机共驾转向系统的自适应控制方法,其特征在于,包括:
2.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述步骤2中,当转向系统控制单元状态正常,并且方向盘转角和安全车速都在允许范围内,同时驾驶员无退出辅助驾驶功能意图时,若此时道路保持辅助系统请求状态为紧急避让状态,则辅助驾驶功能状态为紧急避让状态,若此时道路保持辅助系统请求状态为非紧急避让状态,则辅助驾驶功能状态为非紧急避让状态。
3.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述步骤2中,根据扭杆力矩判断驾驶员有无退出辅助驾驶功能意图,当扭杆力矩大于退出辅助驾驶功能阀值m0且保持一设定时间t0时,判断驾驶员有退出辅助驾驶功能意图,当扭杆力矩小于退出辅助驾驶功能阀值m1且保持一定时间t1时,判断驾驶员无退出辅助驾驶功能意图。
4.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述步骤2中,当辅助驾驶功能状态为紧急避让状态时,扭杆力矩大于退出辅助驾驶功能阀值m3且保持一设定时间t3时,判断驾驶员有退出辅助驾驶功能意图,当扭杆力矩小于退出辅助驾驶功能阀值m4且保持一定时间t4时,判断驾驶员无退出辅助驾驶功能意图。
5.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述的步骤3中,驾驶员手力矩的计算方法包括以下步骤:
6.根据权利要求5所述的人机共驾转向系统的自适应控制方法,其特征在于,当助力电机转子加速度、方向盘转角速度、扭杆力矩中任意一个信号超出有效范围时,驾驶员手力矩置无效值。
7.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述的步骤4中,人机共驾状态包括驾驶员干预状态、临时故障状态、永久故障状态、紧急避让模式和人机共驾模式。
8.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述的步骤5中,转向系统的抖动状态包括抖动正向监测状态、抖动反向监测状态、初始化状态和衰减状态。
9.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述的步骤8中,计算角度闭环控制的初始输出扭矩的步骤如下:
10.根据权利要求8所述的人机共驾转向系统的自适应控制方法,其特征在于,当系统从非人机共驾状态跳转到人机共驾状态时,将内环i参数沿预设梯度下降到零并保持为零。
11.根据权利要求8所述的人机共驾转向系统的自适应控制方法,其特征在于,当转向系统抖动状态发生置位时,替换双环pid控制系统的pid参数,替换的pid参数随安全车速和抖动次数变化。
12.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述步骤9中,共驾调协系数的计算步骤如下:
13.根据权利要求1所述的人机共驾转向系统的自适应控制方法,其特征在于,在所述步骤10中,计算转向系统助力电机最终输出扭矩的步骤如下:
技术总结
本发明公开了一种人机共驾转向系统的自适应控制方法,根据安全车速、角度闭环控制的初始输出扭矩、共驾调协系数,计算协调后的基础助力输出扭矩和角度闭环控制的最终输出扭矩,并对角度闭环控制的最终输出扭矩进行限幅后,将两者叠加作为转向系统助力电机最终输出扭矩。本发明目的是在于提升辅助驾驶功能在系统抖动时的鲁棒性,同时可以更加精准地识别驾驶员意图,从而可以平顺地协调驾驶员与高级驾驶辅助系统对转向系统的控制权,提升驾驶体验。
技术研发人员:兰洪星,姚树桐,梁嫣楚,杨娜
受保护的技术使用者:博世华域转向系统有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!