一种液压驱动运输机器人的制作方法
本发明涉及液压驱动控制,尤其是指一种液压驱动运输机器人。
背景技术:
1、工程机械等行走机器人的静液压驱动是指发动机(内燃机或电动机)输出的机械能在液压泵中转化为液压能,经管道和控制阀等传输到液压马达,在马达处重新转化为能克服负荷引起的扭矩和达到所需转速的机械能,并由马达直接或间接输出这一机械能,带动车轮(或履带)转动,达到机器人行走的目的。
2、目前研究者们针对液压驱动机器人的控制做了一些研究。cn110671376a提出了一种负载敏感分流阀、变速同步驱动系统及工作方法,适用于具有多液压缸的液压机器人,能够提高液压系统的效率和操控性。cn115636011a提出了一种无人车的全液压转向系统的转向控制系统、方法及机器人,能够提高转向切换的响应速度、和动态响应等特性。但这些机器人车轮的转角受转向悬架梯形结构的限制,同一悬架上两个转向轮相互影响,无法单独调节转角,非常依赖悬架结构的设计,从而无法满足转向中心始终在垂直于车身的一条直线上,这样既会导致车轮转向中心不可控,还会导致两侧车轮转速不合理,造成车轮与地面滑动摩擦,减少车轮寿命。
技术实现思路
1、为此,本发明所要解决的技术问题在于克服现有技术中液压驱动运输机器人同一悬架上两个转向轮相互影响,无法单独调节转角的问题。
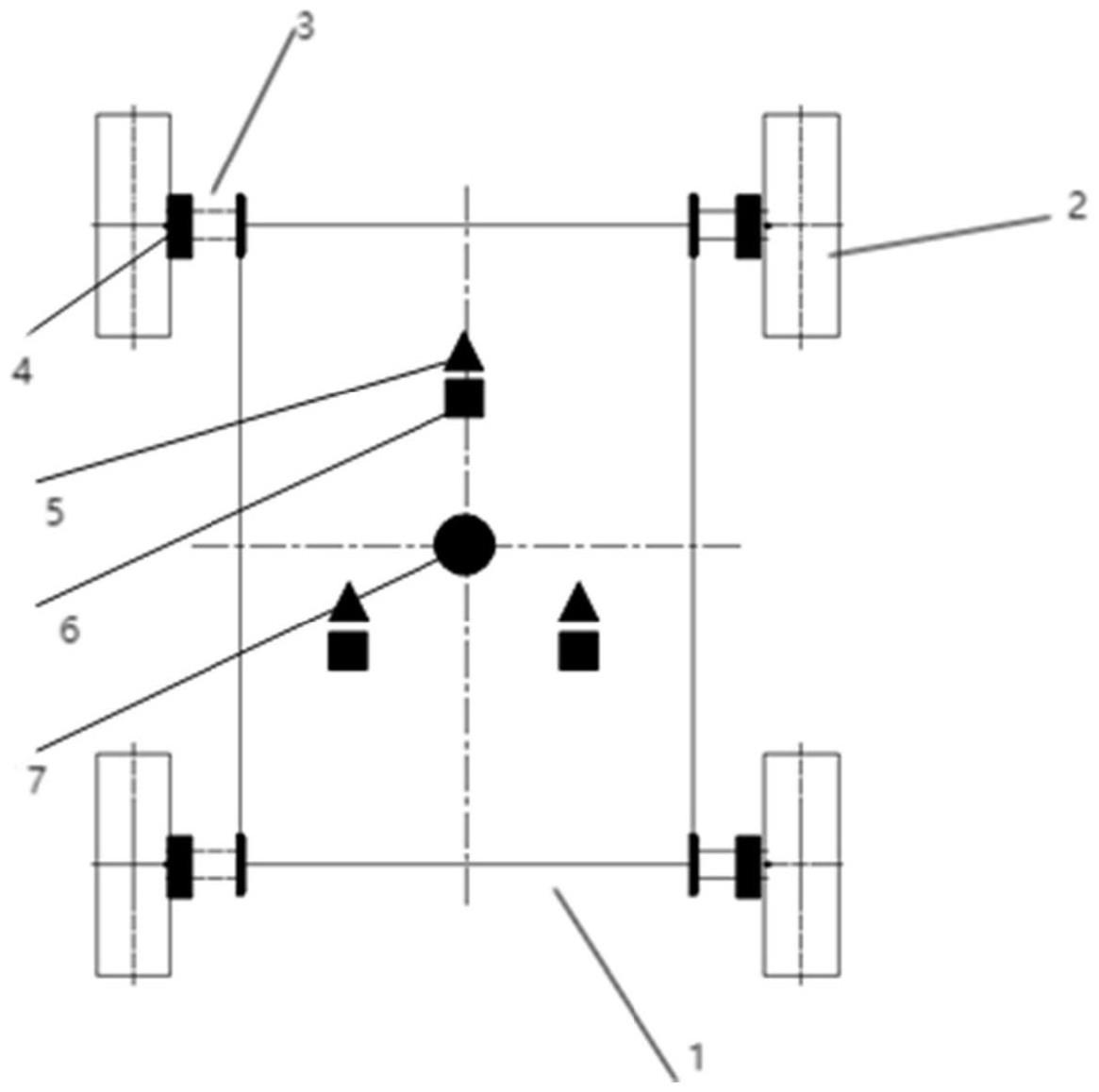
2、为解决上述技术问题,本发明提供了一种液压驱动运输机器人,包括:
3、车身;
4、多个车轮,与所述车身连接;
5、多个独立的转向驱动机构,分别与各个车轮连接,用于控制各个车轮的转速、转角和倾斜度;
6、转速传感器,设置于各个车轮上,用于检测各个车轮转速;
7、多个陀螺仪,设置于所述车身上,用于检测车身倾斜度;
8、多个加速度计,设置于所述车身上,用于检测车身加速度;
9、速度传感器,设置于所述车身上,用于检测车身速度;
10、pid控制器,用于接收转向指令,并根据当前状态下的所述各个车轮转速、所述车身倾斜度、所述车身加速度和所述车身速度计算转向中心,向所述多个独立的转向驱动机构发送控制指令。
11、优选地,所述转向驱动机构包括:
12、液压马达,用于控制车轮转速;
13、倾斜调节液压缸,用于控制车轮倾斜度;
14、多个转向调节液压缸,用于控制车轮转角。
15、优选地,所述倾斜调节液压缸安装于车轮导盘的上半侧,通过伸缩改变车轮外倾角。
16、优选地,所述多个转向调节液压缸分别安装于液压马达两侧的车轮导盘上,通过伸缩共同控制车轮转角。
17、优选地,所述多个陀螺仪和所述多个加速度计两两一组,安装在所述车身的不同位置。
18、优选地,所述接收转向指令,并根据当前状态下的所述各个车轮转速、所述车身倾斜度、所述车身加速度和所述车身速度计算转向中心,向所述多个独立的转向驱动机构发送控制指令包括:
19、在接收到转向指令后,根据阿克曼转向原理,利用当前状态下的所述各个车轮转速、所述车身倾斜度、所述车身加速度和所述车身速度实时计算转向中心;
20、根据所述转向中心实时控制转向却动机构。
21、优选地,所述在接收到转向指令后,根据阿克曼转向原理,利用当前状态下的所述各个车轮转速、所述车身倾斜度、所述车身加速度和所述车身速度实时计算转向中心包括:
22、当所述车身倾斜度满足预设转向条件时,将所述转向中心设置在距离车身较近的第一预设距离处,直至所述车身回到所述转向指令的转向路线上后,将所述转向中心以预设速度逐渐远离所述车身,以便保持转向轨迹;
23、当所述车身速度高于第一预设阈值时,将所述转向中心设置于距离车身较远的第二预设距离处,直至所述车身速度满足预设条件后,将所述转向中心以预设速度逐渐靠近所述车身。
24、优选地,所述当所述车身倾斜度不满足预设转向条件时,重新计算转向路线。
25、优选地,所述根据所述转向中心实时控制转向却动机构包括:
26、根据所述转向中心计算车轮转速,所述车轮转速与所述转向中心离车身的距离呈正相关;
27、根据所述转向中心实时调整车轮转角,使得轮心法线经过转向中心。
28、优选地,所述pid控制器还用于:
29、当车身倾斜度达到第二预设阈值时,将车轮上半部分进行内收缩,并增大车轮外倾角。
30、本发明的上述技术方案相比现有技术具有以下优点:
31、本发明所述的液压驱动运输机器人,设有用于控制车轮转向的转向驱动机构,用于检测车轮转速的转速传感器,用于检测车身的倾斜度的陀螺仪,用于检测车身的加速度的加速度计,用于检测车身的速度的速度传感器,通过采用pid控制算法调整运输机器人各个车轮转向驱动机构的流量分配和控制,能够实现不同运行工况(转向、偏载等)的自适应匹配,具有成本低、精度高、线性度好、响应快的特点;由于本发明中各车轮均有独立的转向驱动机构,各转向轮之间互不影响,因此能够自动调节车轮转角,确保转向中心始终在垂直于车身的一条直线上,减少车轮与地面滑动摩擦,延长车轮寿命。
技术特征:
1.一种液压驱动运输机器人,其特征在于,包括:
2.根据权利要求1所述的液压驱动运输机器人,其特征在于,所述转向驱动机构包括:
3.根据权利要求2所述的液压驱动运输机器人,其特征在于,所述倾斜调节液压缸安装于车轮导盘的上半侧,通过伸缩改变车轮外倾角。
4.根据权利要求2所述的液压驱动运输机器人,其特征在于,所述多个转向调节液压缸分别安装于液压马达两侧的车轮导盘上,通过伸缩共同控制车轮转角。
5.根据权利要求1所述的液压驱动运输机器人,其特征在于,所述多个陀螺仪和所述多个加速度计两两一组,安装在所述车身的不同位置。
6.根据权利要求1所述的液压驱动运输机器人,其特征在于,所述接收转向指令,并根据当前状态下的所述各个车轮转速、所述车身倾斜度、所述车身加速度和所述车身速度计算转向中心,向所述多个独立的转向驱动机构发送控制指令包括:
7.根据权利要求6所述的液压驱动运输机器人,其特征在于,所述在接收到转向指令后,根据阿克曼转向原理,利用当前状态下的所述各个车轮转速、所述车身倾斜度、所述车身加速度和所述车身速度实时计算转向中心包括:
8.根据权利要求7所述的液压驱动运输机器人,其特征在于,所述当所述车身倾斜度不满足预设转向条件时,重新计算转向路线。
9.根据权利要求6所述的液压驱动运输机器人,其特征在于,所述根据所述转向中心实时控制转向却动机构包括:
10.根据权利要求1所述的液压驱动运输机器人,其特征在于,所述pid控制器还用于:
技术总结
本发明所述的液压驱动运输机器人,设有用于控制车轮转向的转向驱动机构,用于检测车轮转速的转速传感器,用于检测车身的倾斜度的陀螺仪,用于检测车身的加速度的加速度计,用于检测车身的速度的速度传感器,通过采用PID控制算法调整运输机器人各个车轮转向驱动机构的流量分配和控制,能够实现不同运行工况(转向、偏载等)的自适应匹配,具有成本低、精度高、线性度好、响应快的特点;由于本发明中各车轮均有独立的转向驱动机构,各转向轮之间互不影响,因此能够自动调节车轮转角,确保转向中心始终在垂直于车身的一条直线上,减少车轮与地面滑动摩擦,延长车轮寿命。
技术研发人员:樊九林,王瑞,冯志华,孙长春,唐志慧,史浩,谢方伟,田祖织,曹衡,刘启龙,刘大源,赵文嘉,高瑞雄,仝建成
受保护的技术使用者:华电煤业集团数智技术有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!